数字技术控制步进电机的回零抖动控制
2011-09-23陈晓春
陈晓春,王 枫
四平市科技局科技市场管理办公室,吉林四平 136000
数字技术控制步进电机的回零抖动控制
陈晓春,王 枫
四平市科技局科技市场管理办公室,吉林四平 136000
在转动力矩较小的步进马达的各类指针式仪表的指针回零检测中,常规的步进电机回零方式,在回到零位时会碰到挡针,从而产生指针抖动,同时产生较大噪声。步进马达的两组线圈交替通电,当信号交替的瞬间,通电的线圈会产生磁场,磁场作用在停止驱动的线圈中会产生一个反向的感应电动势,通电稳定后会消失。当指针碰到挡针时,反向电动势会更大,因此通过计算可以判断处指针是否回到零位,来减少抖动及噪声。
步进马达;回零检测;抖动
0 引言
步进电机由于其输出控制特性,使其越来越多地应用在各类指示仪表的驱动上,尤其是在汽车仪表上目前基本上全部采用采用步进电机作为仪表指针的控制和驱动。本文主要针对汽车仪表应用步进电机在使用过程中,指针回零后如何控制指针的抖动,而进行专门研究。通过本研究方法适用于应用转动力矩较小的步进马达的各类指针式仪表的指针回零控制。
1 应用背景技术
仪表在运输时,由于步进电机没有保持力矩,运输过程中的震动很容易导致仪表指针出现离开零位的现象,因此在仪表通过长途运输到装配时,就必须在装配上电时自动找回零位。以往的回零方式是强制马达回转300度,但马达的行程一般为270度,当指针回到零位时会碰到挡针,这时会产生指针抖动、噪声较大等现象。本文就是通过使用数字化的回零检测方法有效地改善指针的回零效果,使指针在可靠回零的同时,最大程度地降低抖动和运行噪音。
2 控制原理
通常步进电机的驱动方式有两种,分步方式和微步方式。分步方式力矩小,步距较大,在回零过程中,如果碰到挡针会产生比较大的噪音。
从图1可以看到,通过线圈的信号是如何转动马达轴的。马达每走一步,信号都将保持90度。分别在SIGNAL A的a+端,SIGNAL B的b+端,SIGNAL A的a-端,SIGNAL B的b-端依次加电,步进电机的转子就可以顺时针旋转了,同时带动马达的轴转动。
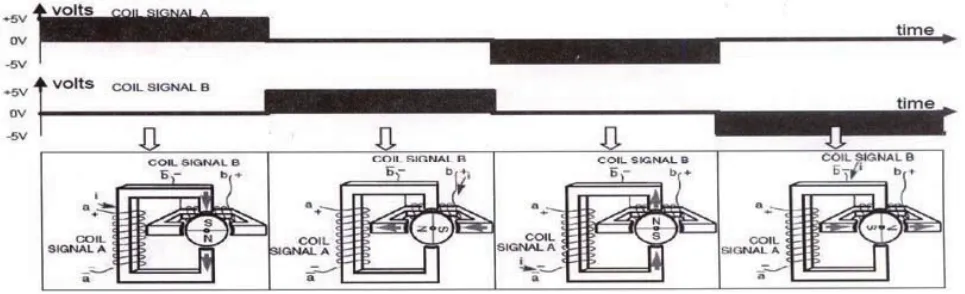
图1 步进马达工作原理
当SIGNAL A和SIGNAL B信号交替的瞬间,根据电磁感应原理,通电的线圈会产生磁场,磁场作用在停止驱动的线圈中会产生一个反向的感应电动势,当通电稳定后就会消失,因此这是一个振荡的信号,如图2所示。
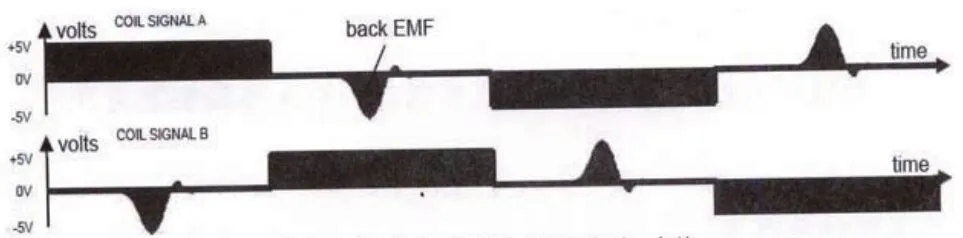
图2 分布方式产生的反方向电动势
但是如果步进电机在回零过程中碰到挡钉,则会在通电线圈上产生比信号交替更大的振荡信号,如图3所示。因此,可以通过积分的方式计算振荡部分的和分量,图中t1为步进电机正常分布回零时的波形,信号交替后产生振荡信号,通过积分计算此时的振荡波形的和分量为一个阈值S, t2为步进电机回到零位碰到挡钉后的波形,如果这时我们不能使步进马达停止,则会产生较大的振荡波形,如图3中波动信号所示。通过积分计算此时的和分量为S1,因此只需判断S1是否大于S就可以判断步进马达是否回到零点。
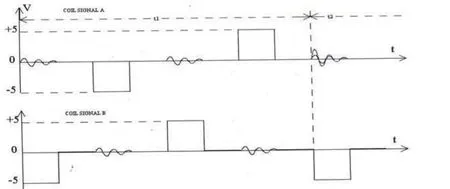
图3 信号交替产生震荡信号与读转产生的振荡信号对比
通过MCU对振荡信号进行采样,并通过软件去计算振荡信号的和分量就可以判断步进马达是否已经回到零点,如判定回到零件,马上输出截止信号从而使马达停转,消除指针抖动及产生的噪音。图4为步进电机与MCU的接口电路,MCU采用NEC的UPD0822,芯片本身集成A/D模块和电机驱动,P140-P143为马达驱动引脚,A/D1-A/D4为AD采集口。

图4 步进马达与MCU接口电路
3 结论
采用此种通过微处理器芯片数字化的控制方式回零,可以在保证有效回零的同时,降低回零噪音,减小回零抖动和指针回弹的现象。通过在不同的实际产品上的应用,本文所述方法控制的步进电机回零件检测和制动,完全可消除步进电机回零时的指针抖动和噪音现象,满足了不同使用环境下产生的步进电机指针偏离零位后的上电平稳回零的要求。
参考资料
[1]关保国,钟伟弘.步进电机的驱动及微机控制[J].自动化与仪表,2000(5).
[2]冯绍娟.步进电机驱动器的设计与实现[J].机械制造与自动化,2001(5).
[3]丁伟雄,杨定安,宋晓光.步进电机的控制原理及其单片机控制实现[J].煤矿机械,2005(6).
Digital Technology Control of the Stepper Motor Back Zero Jitter Control
CHEN Xiaochun,WANG Feng SipingScience Technology Market Management Office,Siping 136000,Jilin Province
In rotating torque smaller stepper motor all kinds of pointer type instrument pointer to zero in detecting, conventional stepmotor return zero way, in return to zero when they encounter block needle, resulting in a pointer jitter, also produce larger noise.Stepping motor of two groups of coil alternate electricity, when a signal is alternant instantly, the electric field, magnetic field coil can produce role in driving the coil in the stop will generate a reverse the induction emf,after electrify stability will disappear.When the pointer encounter block needle, reverse emf will be bigger, so through calculation can judge whether back to zero in a pointer to reduce jitter and noise.
stepping motor;return zero;examination wobble
TM383
A
1674-6708(2011)37-0163-02
陈晓春,副高,工作单位:四平市科技局市场管理办公室,主要从事科技管理和推广
