全天候大功率海洋救助船快速性试验研究
2011-09-22周国平桂满海
周国平 桂满海
(上海船舶研究设计院,上海 200032)
0 引言
我国是一个海洋大国,有漫长的海岸线及辽阔的经济水域。为了维护在我国漫长海岸线及诸岛屿上从事海洋开发、海上生产、船舶运输的人员生命安全,以及对在我国海域航行遇险国际船舶的人员实施救援,研发、设计各种高性能海洋救助船是时代发展及国家赋予我们的责任。因此,对救助船舶技术性能、抗风浪性能以及在大风浪恶劣海况条件下对海上遇险人员的有效救助提出了更高要求,加快各种高性能海洋救助船的研发、设计和建造,特别是组建海上直升机立体救助体系的新一代高性能救助船舶研发,提高海上立体救助能力迫在眉睫。
全天候大功率海洋救助船 (以下称 “南海救101”)是由上海船舶研究设计院为交通部救捞系统自主研发设计、广州中船黄埔造船有限公司成功建造的救助功能最全、作业能力最强、推进功率最大、航行速度最快的新一代全天候立体救助专用海洋救助船。该船被誉为“中国第一救”,堪称当今国内的救助船旗舰,代表我国救助行业的形象。“南海救101”实船照片见图1。该船是我国救捞体制改革后,实行全天候海上救助值班待命制度,建立快速应急反应和紧急救助机制的第一艘设有救助直升机起降平台、组建海上直升机立体救助的高性能海洋救助船舶。该船主要用于海上遇难船舶的人命救生、以海上人命救生为目的的救助拖曳和二级对外消防灭火等救助作业,所以要求船舶具有较高的航速,以满足应急救助的特殊要求[1]。

图1 全天候大功率海洋救助船“南海救101”
“南海救101”是一艘研发设计难度较高的船舶。全天候14000 kW大功率海洋救助船的研发设计,必须适应以人命救助为目的的快速反应机制和适应全天候海上救助值班待命制度的要求。船型的研发设计中存在着众多关键技术和重大特种技术难题,快速性能的研究是该船型开发研究的关键项目之一。在该船的快速性能研究中,主要对主尺度和船型系数进行了论证和选择,对船体线型进行了优化研究设计,以及对不同主尺度、不同吃水、不同纵倾浮态、带导管螺旋桨和不带导管螺旋桨、双桨推进和三桨推进等不同船型方案进行了船模试验和分析研究。本文在此对该船的船型与快速性试验研究作一简要介绍。
1 主尺度和型线研究
“南海救101”特种技术专题研究,主要是研究解决海洋救助船研发设计中的关键技术和重大特种技术难题,进行技术攻关。该船航速是一项关键性指标,根据设计任务书要求,船舶在已定主机功率(14000 kW)下,要满足10000 n mile续航力的装载要求,设计常用航速不小于20.0 kn,在三分之一装载工况下最大救助航速不小于22.0 kn。按船舶的装载要求,该船属大排水量船型,要求有较大的船体尺度和方形系数;该船傅汝德数0.364,大于0.3,而又属高航速船舶[2],在限定的主机功率(14000 kW)条件下,如采用较大的船长和较小的方形系数能有效提高船舶快速性能;但是,根据该船救助作业的特殊性,对船舶的操纵回转性能有极高要求,船长越短越能有效提高船舶的操纵回转性能;船舶要满足海上拖曳作业时的急牵稳性要求,是拖船设计中必须考虑的问题,要求船型必须具有较大的船宽、排水量和初稳性,才能确保海上拖曳作业时的急牵安全。研发设计中要解决船型的大装载、高航速、操纵性能和拖曳稳性这些矛盾,所以必须从主尺度、船型系数选择及线型优化设计等几个方面来综合考虑。
在线型优化设计中,除考虑上述所提到的要求外,还需要考虑该船特种设施、设备布置和安装的特殊要求,如:直升机平台结构、设备等布置在船首,为平衡其重量重心前移,浮心位置需前移;首尾侧推安装处的线型要有足够的宽度,以便于侧推设备的安置;轴系出轴位置应尽可能后移,从而能使尾轴长度减小,以减少因尾轴过长而产生轴振;球首前端距船体首端点距离不得小于0.6 m,以确保船舶在任何纵倾状态下,球首前端不超出船体首端点,以满足救助作业、消防灭火、拖曳操纵等特殊要求;尾部线型要保证两只大直径螺旋桨在大的推进功率驱动情况下有良好的来流,螺旋桨位置在#4-150,并应确保直径Ø4000 mm的螺旋桨与船体有足够的间隙,减少螺旋桨水流对船体的冲击。
该船采用了适宜的上翅式球鼻首、U型首部线型及V型尾部线型,以降低船舶航行阻力,并改善双螺旋桨的伴流速度场,提高推进效率;在设计球鼻首时有意识地将球首横剖面形心略上移,增长了轻载状况时的水线长度,以减小兴波阻力,改善轻载状态阻力[3]。从船模试验中可以看出,流线非常顺畅,首波很小,尾流平缓。实践证明这样的设计是行之有效的。
2 实船研制性能试验
实船采用双机、双桨推进形式。主机选用WARTSILA 6L46D型船用中速柴油机2台,每台主机最大持续功率(MCR)6930 kW,转速 500 r/min;螺旋桨采用无导管4叶可调螺距螺旋桨(CPP)2只,螺旋桨直径Ø4000 mm。该船由广州中船黄埔造船有限公司承造,在广州珠江口桂山海域进行了实船航行试验,各项技术性能指标均达到和超过原设计任务书的技术要求,在轻载吃水(三分之一装载)5.0 m情况下,航速测试数据为22.08 kn,实船航速达到了设计任务书要求。
3 船模试验和分析研究
为优化和完善船型方案的主尺度、船型系数取值和线型设计,在各阶段线型设计后,分别在上海交通大学和中国船舶科学研究中心(702所)安排了数次船模快速性试验,对该船进行了不同主尺度、不同吃水、不同纵倾浮态、带导管螺旋桨和不带导管螺旋桨、双桨推进和三桨推进等不同船型方案的船模试验和分析研究,全方位比较不同船型方案的优劣。
3.1 船型初步方案船模试验
船型初步方案确定之后,在中国船舶科学研究中心(702所)01水池中进行阻力、流线及自航船模试验[4]。船模试验的目的主要是比较船型在初步方案所设定的主尺度下,在不同吃水、不同纵倾浮态、带导管螺旋桨和不带导管螺旋桨时对航速的影响,及所要达到预定航速对主机功率的要求。试验内容主要包括:设计吃水阻力及自航试验,轻载吃水阻力试验(分为平吃水及有纵倾两种情况),有纵倾状态带导管螺旋桨的自航试验,平吃水状态不带导管螺旋桨的自航试验,以及带导管螺旋桨和不带导管螺旋桨的敞水试验,并分别进行主机功率及航速预估。船体主要尺度要素见表1。
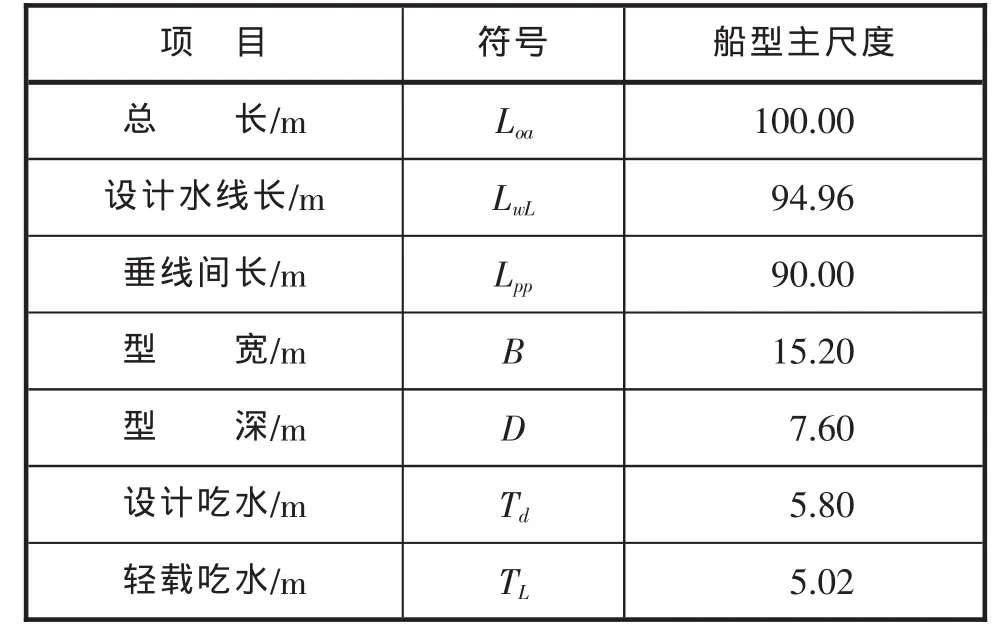
表1 船体主要尺度要素表
试验中阻力和自航试验结果均采用二因次换算方法换算到实船海水15℃情况,摩擦阻力因数采用1957-ITTC的船模—实船相关线 [即CF=0.075/(logRn-2)2]进行计算。其设计吃水状态的相关补贴取CA=0.3×10-3,轻载吃水状态的相关补贴取CA=0.4×10-3。根据船模试验结果,进行新螺旋桨设计:导管螺旋桨为Ka.4系列,导管为19A导管;无导管螺旋桨为MAU图谱桨。用新设计的导管螺旋桨及无导管螺旋桨对试验船模之实船,进行主机功率预估及航速预报,结果见表2。
从上述船模试验结果,并进行新螺旋桨设计后可以看出:
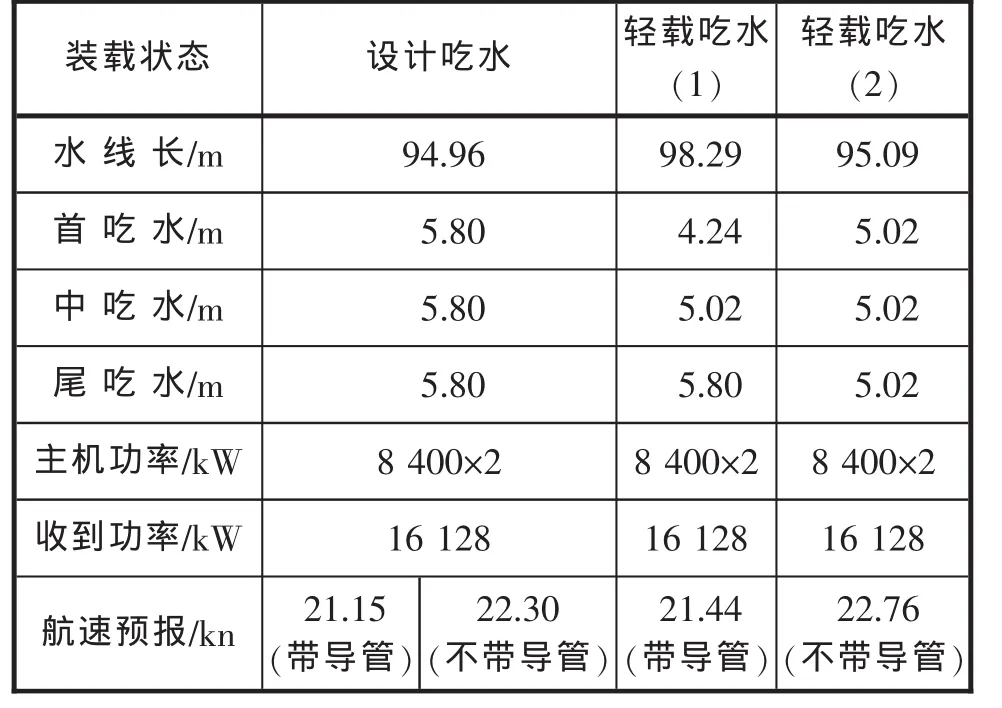
表2 实船功率及航速预报
1)带导管螺旋桨对航速的影响较大,如:在设计吃水状态下,相同的收到功率,带导管螺旋桨的航速要比无导管螺旋桨低1.15 kn。
2)在轻载吃水状态下,带导管螺旋桨的航速要达到22 kn,需提供16800 kW以上的主机功率。
3)在轻载吃水状态下,相同的收到功率,无导管螺旋桨的航速已超过22 kn。可见,当在22 kn航速时主机功率可适当降低。
带导管螺旋桨和不带导管螺旋桨船模见图2和图3。
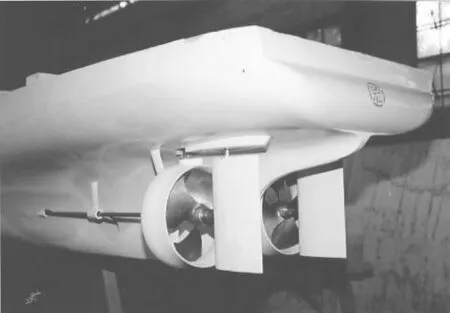
图2 带导管螺旋桨船模
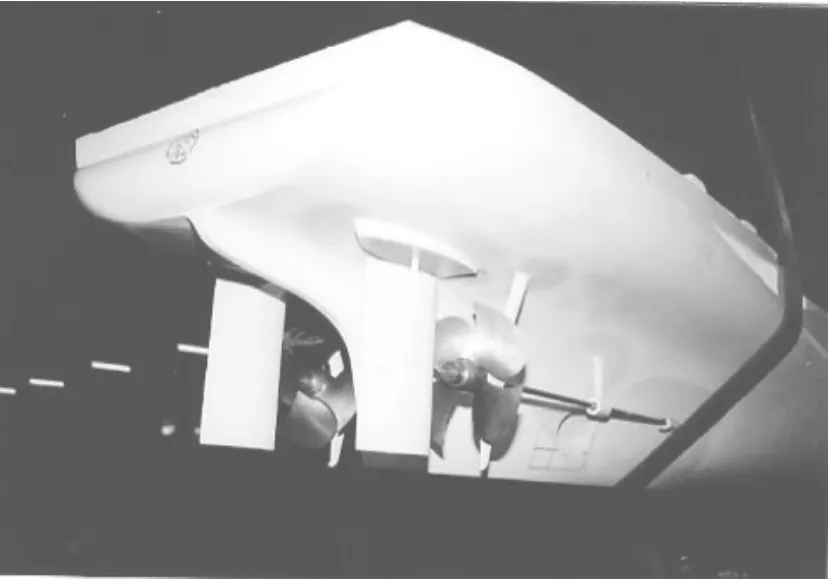
图3 不带导管螺旋桨船模
3.2 电力推进三桨船型方案船模试验
在船型初步方案的船模试验之后,根据船东意见,要求进行电力推进船型的方案比较。在上海交通大学船模试验池进行了电力推进三桨船型的包括流线、阻力和自航在内的船模快速性试验[5]。船模试验的目的主要是了解在采用电力推进三桨船型方案时,对推进功率的分配要求及航速影响。
该船如果采用电力推进船型方案,由于受船体主尺度的限制,要安装2台大功率的电力推进全回转推进装置,是比较困难的,推进装置的回转直径尺寸将会超出船宽,其船内设备的安装高度也超出了型深甲板的高度。因此,电力推进船型方案应采用较小尺度的全回转推进装置,以使得这种推进装置在现有主尺度的船型上安装成为可能。为达到22 kn航速所要求的推进功率,需采用3只螺旋桨来共同分担其较大的推进功率。设计考虑主推进中桨采用1台船内电动机驱动的可调螺距螺旋桨,两侧的边桨采用2台水下电动机驱动的紧凑型360°全回转舵桨装置。在线型优化设计中,船尾部采用三桨线型,中桨采用球尾线型,两侧的采用适合全回转舵桨装置安装的平底线型。为尽可能减少3只桨的相互干扰,在中桨的后部设整流球和导流板。
主要试验内容有:流线试验,设计吃水阻力及自航试验,轻载吃水阻力及自航试验,满载吃水阻力及自航试验,以及边桨和中桨的敞水试验,并分别进行推进功率预估、功率分配和航速预报。
根据船型在初步方案船模试验中,轻载吃水无导管螺旋桨状态下航速结果,并按照布置要求,适当调整了船体的船长和型宽,船体主要尺度要素见表3。

表3 调整后的船体主尺度要素表
试验中阻力换算到实船海水15℃情况,摩擦阻力因数采用1957-ITTC公式进行计算,并取ΔCf=0.4×10-3。自航试验结果的实船性能预报采用ΔCt-Δw法进行。
实船自航点的摩擦阻力修正按式(1)计算:

式中:ρm——船模试验时水的密度;
Sm——船模湿表面面积;
vm——船模速度;
Ctm、Cts——分别为船模及实船总阻力系数;
其中:实船总阻力系数按公式(2)计算:

式中:Crm——剩余阻力系数;
Cfs——实船摩擦阻力因数;
ΔCt——取0.4×10-3;
p——考虑到空气阻力2%及壳板排水量增加的阻力0.6%。
实船伴流分数按式(3)计算:

式中:ωm、tm——分别为船模的推力减额及伴流分数;
Cfm、Cfs——分别为船模及实船的摩擦阻力系数;
Δω——实船伴流的尺度作用因素。
根据船模试验结果,使用试验备用桨的水动力性能(中桨和边桨分别进行敞水试验)作实船性能初步预报,分别进行推进功率预估、功率分配和航速预报。由于两侧2台水下电动机驱动的紧凑型全回转舵桨装置(吊舱式)分担推进功率是有分级挡次的,故须按试验结果相近的分级指定推进功率分配来进行实船航速预报,并预估达到22 kn航速时所要提供的推进总功率,以及中桨船内电动机驱动功率和两侧边桨2台水下电动机驱动功率和分配情况。实船航速预报见表4。三桨船尾部船模见图4。
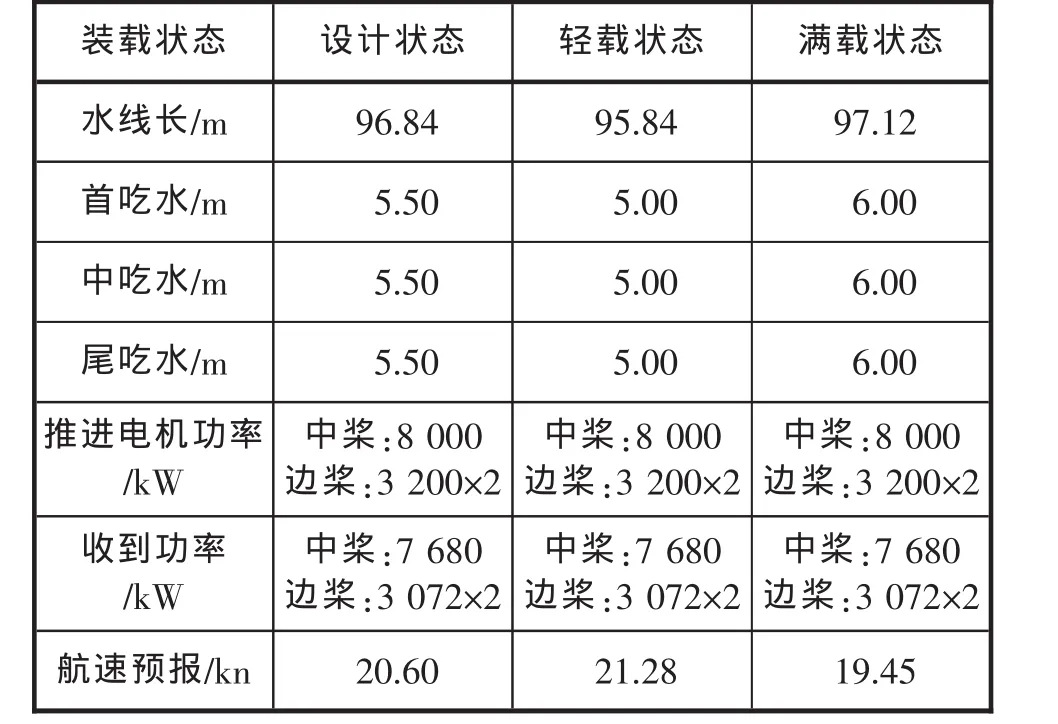
表4 实船功率及航速预报

图4 三桨船尾部船模
从上述船模试验结果中可以看出:
1)3只螺旋桨按指定推进功率分配,当中桨8000 kW、两侧边桨各为3200 kW时,轻载吃水状态下航速约为21.28 kn;
2)轻载吃水状态下,航速要达到22 kn,则需加大推进电机功率,中桨需加大至9824 kW、两侧边桨各需加大至4099 kW。这样推进总功率将达到18000 kW以上。
在船模试验研究中发现:三桨船型的自航试验较之双桨船型和单桨船型在处理方法上有所不同,试验测量上难度也较大;三桨船型的船体线型与螺旋桨功率分配和转速及螺旋桨推进性能匹配情况有关。三桨船型的研究难点在于3只螺旋桨要达到最佳匹配来分配推进功率,即在正常航行中,要使3只螺旋桨的工作负荷都处于较经济合理的状态,各自推进效率合理和综合推进效率最佳,故需对各只螺旋桨参数,如:直径、螺距、转速等作合适的选择;为适应不同的作业装载工况(吃水状态)的推进要求,根据上述船模试验研究,三桨船型推进装置方式采用可调速的变螺距CPP桨是较为适宜的,能较好地适应不同的推进需求。
3.3 常规推进方案船模试验
根据上述二轮船模试验研究、推进装置的配置以及对推进功率的预估,可以明显看出,无导管螺旋桨常规推进方式具有较好的性价比。经过技术经济分析论证,船型基本确定采用不带导管CPP桨常规推进方式。又在中国船舶科学研究中心(702所)01水池进行了该船型常规推进方案的阻力、流线及自航船模试验[6]。船模试验的目的主要是了解在初步设定的主尺度和14000 kW的限定主机功率情况下,在不同吃水时所能达到的航速。试验主要包括:设计吃水阻力及自航试验,轻载吃水阻力及自航试验,满载吃水阻力及自航试验及螺旋桨的敞水试验,并进行航速预报。船体主要尺度要素与电力推进三桨船型方案的表3相同,但是船体尾部线型不同,按照无导管螺旋桨常规推进方式双桨船型要求进行了线型设计。根据船模试验结果,用MAU图谱桨进行新螺旋桨设计,预报14000 kW限定主机功率情况下之实船航速,其结果见表5。
从上述船模试验结果中可以看出:在轻载吃水状态下,达到22 kn航速,并有一定的富余量。
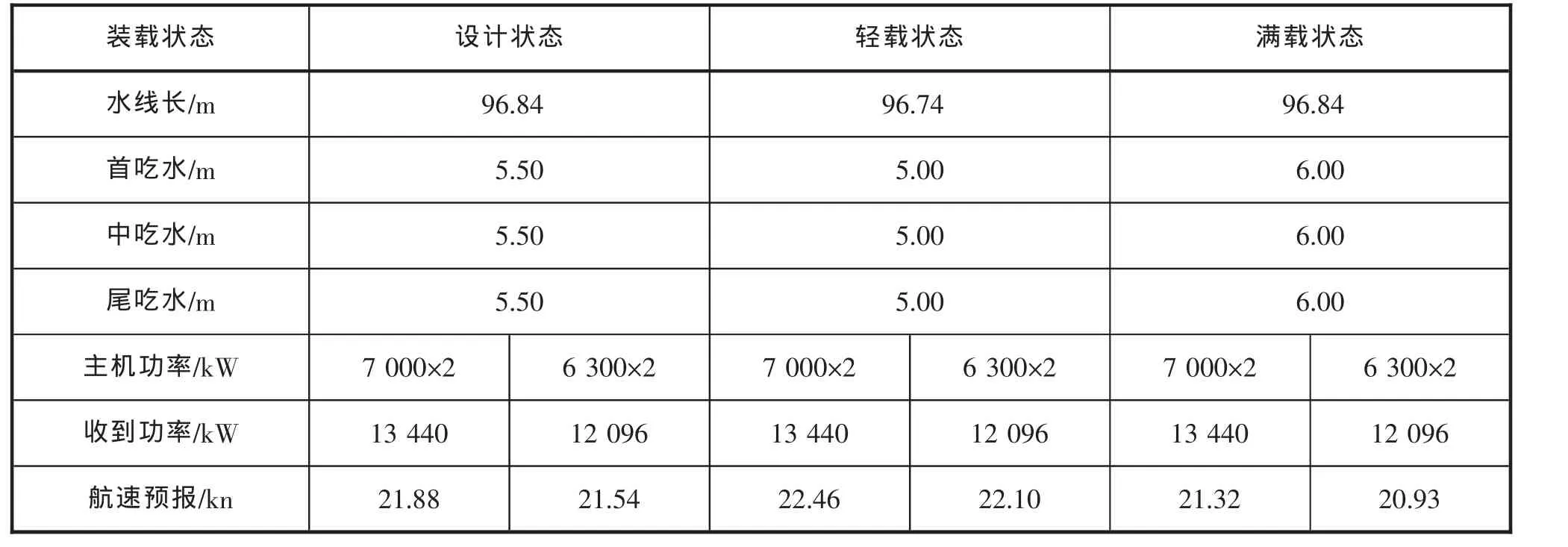
表5 实船功率及航速预报
3.4 变纵倾船模试验
根据上述常规推进方案船模试验研究,考虑到船型在不同的纵倾浮态下,对快速性能会有不同的影响。在中国船舶科学研究中心(702所)01水池进行了上述船型尺度的 “变纵倾模型快速性试验”[7]。船模试验的目的主要是了解上述常规推进方案船型在不同纵倾浮态下,对船舶阻力及快速性能的影响。船模试验选择在轻载吃水状态下,对3种不同纵倾吃水浮态测量船舶阻力,对较好阻力性能的纵倾浮态进行自航试验,以及螺旋桨的敞水试验,并进行相应航速预报。3种不同纵倾吃水浮态按首尾吃水差值0.8 m进行变化,平均吃水5.0 m,即:轻载状态(1)首尾吃水差值0.8 m,轻载状态(2)首尾吃水差值1.6 m,轻载状态(3)首尾吃水差值2.4 m。根据船模试验结果,3种不同纵倾吃水浮态,船舶阻力性能见表6。
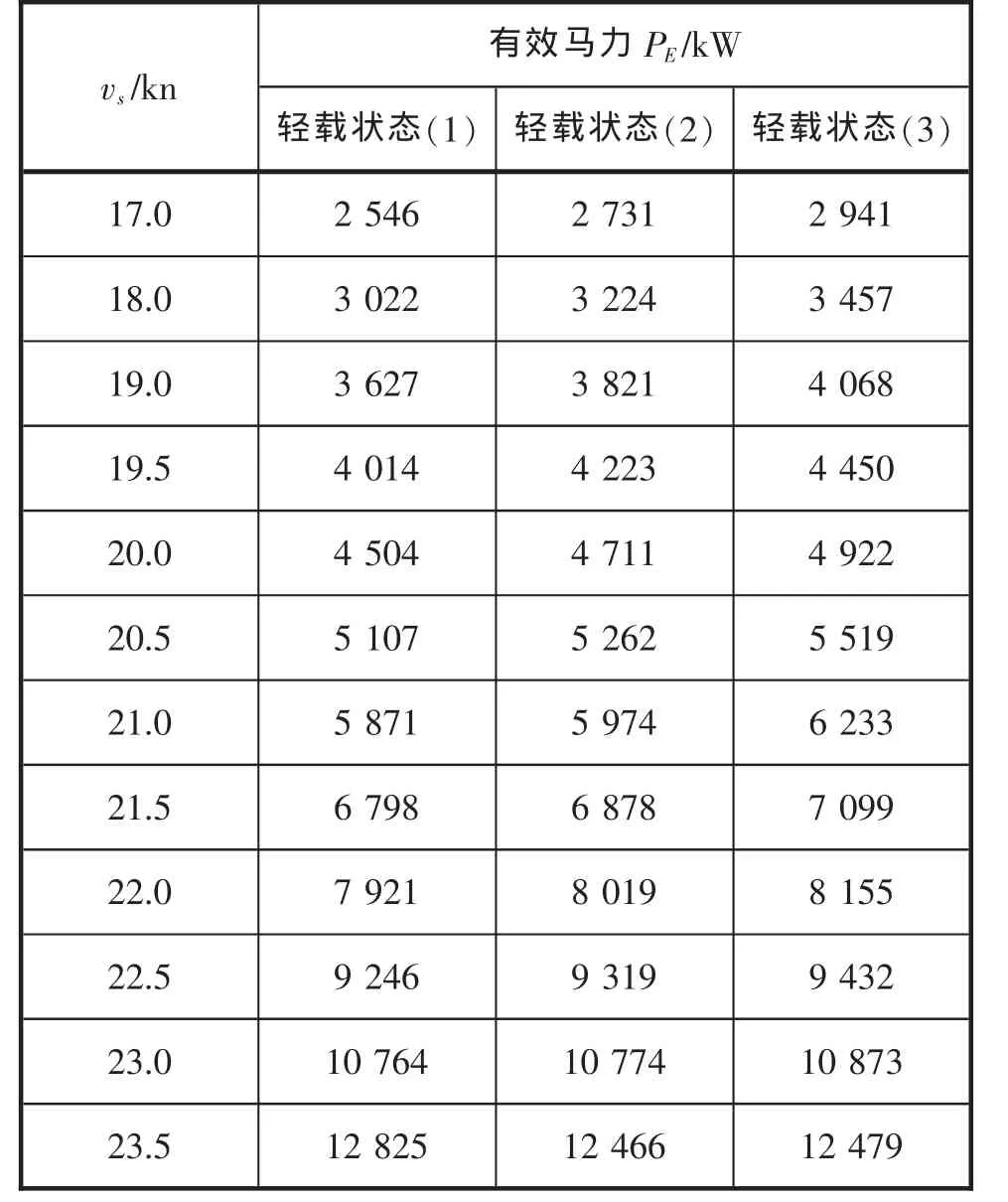
表6 不同纵倾浮态下船舶阻力性能表
从上述3种不同纵倾吃水船模试验的船舶阻力性能结果中可以看出:轻载状态(1)具有较佳的阻力性能,为此对轻载状态(1)进行自航试验及螺旋桨的敞水试验,并根据船模试验结果,对船模之实船进行航速预报。在阻力性能较佳的轻载状态(1),当主机功率14000 kW时,航速约为22.3 kn。此值与表5(水平浮态)中的预报航速比较,可以看出:该船在水平浮态(首尾吃水相同)下的快速性能较优,航速达到22.46 kn,大于阻力性能较佳的纵倾轻载状态(1)航速。同时,在船模试验研究中,发现纵倾的变化,对阻力性能影响不大。
3.5 最终船型方案船模试验
经过上述数轮船模试验研究,较全面地比较了不同主尺度、不同吃水、不同纵倾浮态、带导管螺旋桨和不带导管螺旋桨、双桨推进和三桨推进等不同船型方案。经过技术经济分析论证和研究,及船舶主要设备确定后的总体装载计算,该船确定采用不带导管CPP双桨常规推进方式,船型最终取垂线间长98.5 m,型宽16.2 m,型深7.6 m,设计吃水5.5 m,轻载吃水(三分之一装载)5.0 m,满载吃水6.0 m。
在最终主尺度、船型系数和线型等方面优化设计后,在中国船舶科学研究中心(702所)01水池进行了该船型最终船型方案验证性船模试验,进行了流线、阻力及自航船模试验[8]。船模试验的目的主要是了解在最终主尺度、船型系数和线型等优化设计后,在14000 kW的限定主机功率情况下,不同吃水时所能达到的航速,并为螺旋桨优化设计提供参数。试验主要包括:设计吃水阻力及自航试验,轻载吃水的阻力及自航试验,满载吃水阻力及自航试验,以及螺旋桨的敞水试验,并预报航速。船体主要尺度要素见表7。
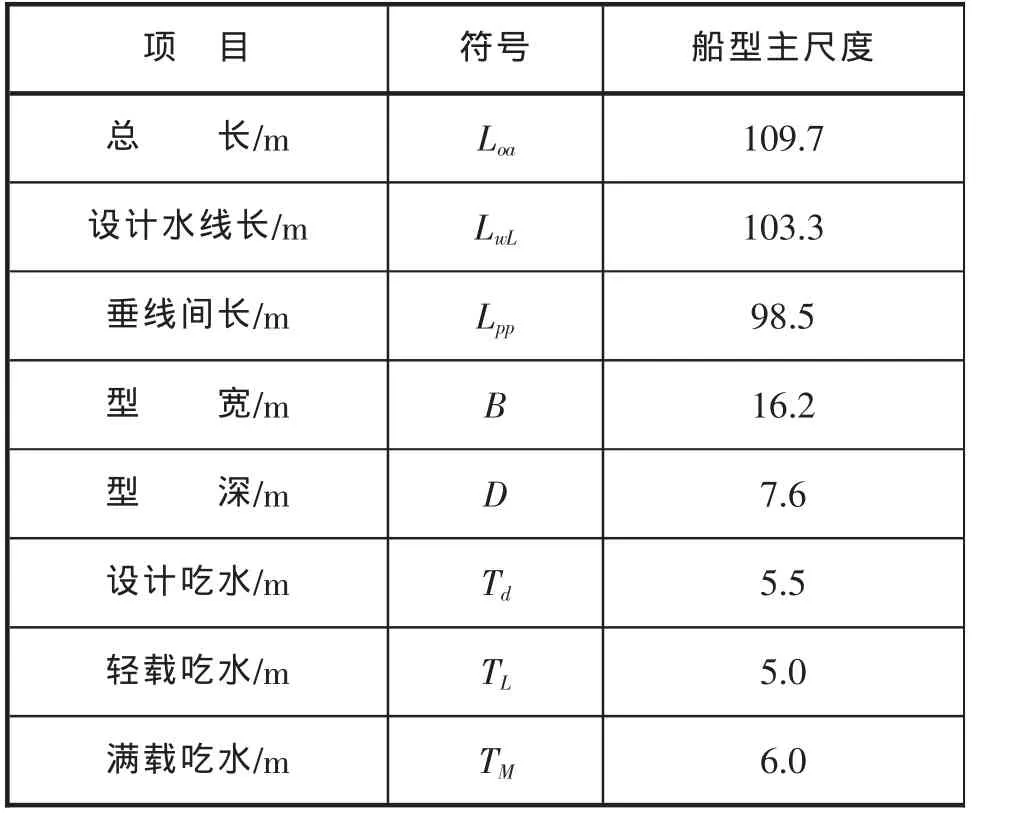
表7 最终的船体主要尺度要素表
试验中阻力和自航试验结果均采用二因次换算方法换算到实船海水15℃情况。根据船模试验结果,用MAU图谱桨进行新螺旋桨设计,预报14000 kW限定主机功率情况下之实船航速,结果见表8。
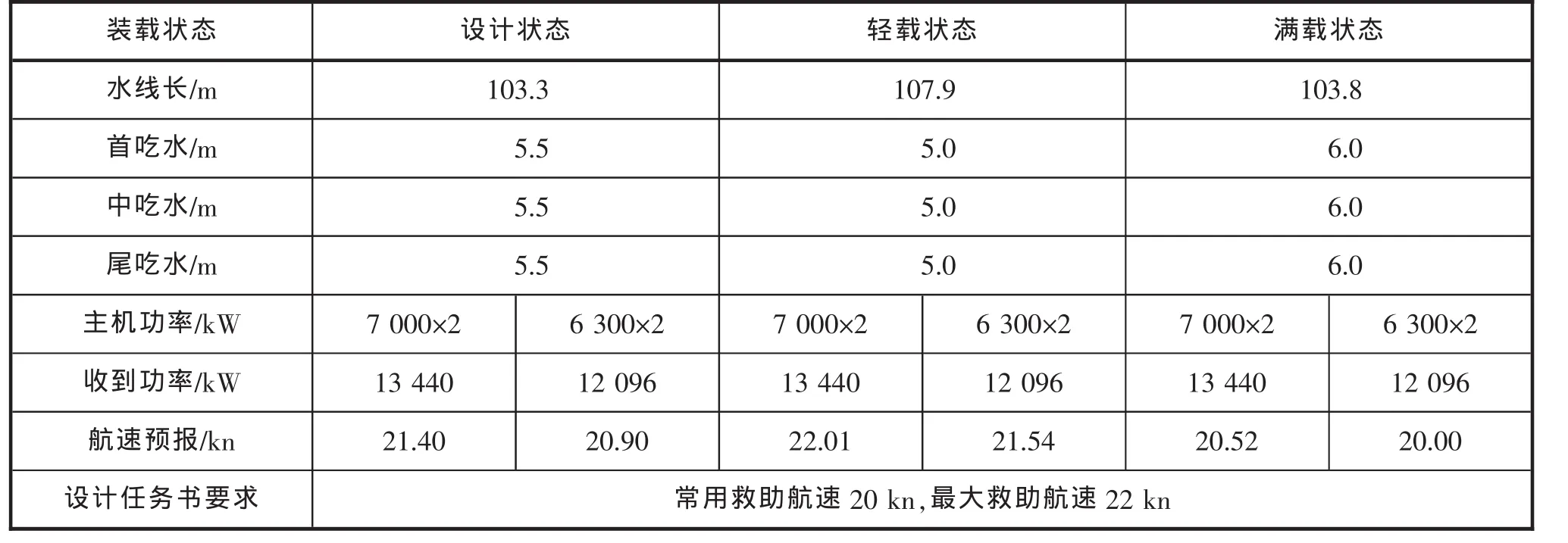
表8 实船功率及航速预报
从上述船模试验结果中可以看出:在最终船型方案主尺度和14000 kW的限定主机功率情况下,无导管CPP双桨常规推进方式,船舶航速达到了设计任务书要求。
4 结语
在“南海救101”研发设计中,对该船的快速性能进行了线型优化研究设计,以及对不同主尺度、不同吃水、不同纵倾浮态、带导管螺旋桨和不带导管螺旋桨、双桨推进和三桨推进等不同船型方案进行了船模试验和分析研究。从主尺度、船型系数及线型等几个方面综合考虑,解决了船舶的大装载、高航速、操纵性能和拖曳稳性等矛盾,取得了较为理想的结果,实船试航验证综合性能达到了设计任务书要求。
在“南海救101”船模试验研究中发现:
1)带导管螺旋桨对航速的影响较大,在同一主尺度和同一推进功率下,航速相差1 kn以上,故对航速要求较高的船舶不建议采用带导管螺旋桨作为推进方式。
2)在同一平均吃水状态下,不同的纵倾浮态对阻力性能有一定的影响,但当纵倾变化在一定的范围之内(首尾吃水相差值不是太大)时,对航速的影响则不大,特别是在船长较长时,首尾吃水相差值所造成的纵倾夹角不是太大,螺旋桨具有一定的浸深,对航速的影响更趋变小。
3)三桨船型较之双桨船型和单桨船型在推进性能上有较大的不同,研究难点在于3只螺旋桨要达到最佳匹配来分配推进功率,即3只螺旋桨的工作负荷都处于较经济合理的状态,才能使综合推进效率提高。这与船体尾部的线型有关,要使得提供给3只螺旋桨的水流处于合理分配状态,并且要与主推进提供给各螺旋桨的推进功率及螺旋桨参数相匹配,才能使推进效率最佳。这是比较困难的。笔者经过分析研究认为:采用可调速的变螺距CPP桨(螺旋桨转速可调)是较为适宜的,能通过螺旋桨转速和螺距的同时调整,协调所提供给各螺旋桨的推进功率,实施良好调整匹配,使3只螺旋桨的工作负荷都处于较经济合理的状态,也就是使各螺旋桨推进效率合理和综合推进效率最佳,能较好地适应不同的推进需求。
[1]周国平,顾建国,郑梓荫,等.新型高性能海洋救助船研发[J].船舶工程,2008(4):11-14.
[2]邵世明,赵连恩,朱念昌.船舶阻力[M].北京:国防工业出版社,1995.
[3]许晶,杨奕,杨佑宗,等.新型海洋救助船主要尺度选择、线型设计及研究[J].中国造船2008,增刊(创刊 60周年专刊):91-98.
[4]杨佑宗,杨奕.全天候大功率救助船模型快速性试验研究报告[R].中国船舶科学研究中心报告,2003.
[5]邵世明.14000千瓦大功率海洋救助电力推进船阻力和自航试验报告[R].上海交通大学海洋工程国家重点实验室船模试验池报告,2004.
[6]杨佑宗,杨奕.14000千瓦大功率海洋救助船模型快速性试验研究报告[R].中国船舶科学研究中心报告,2004.
[7]杨佑宗,杨奕.14000千瓦大功率海洋救助船变纵倾模型快速性试验研究报告[R].中国船舶科学研究中心报告,2004.
[8]杨佑宗,杨奕.14000千瓦大功率海洋救助船新方案模型快速性试验研究报告[R].中国船舶科学研究中心报告,2005.