太阳能电池板定位系统的研究
2011-09-21杨雅志
杨雅志
(1.成都电子机械高等专科学校 计算机工程系,成都 610071;2.四川师范大学 计算机科学学院,成都 610101)
太阳能电池板定位系统的研究
杨雅志1,2
(1.成都电子机械高等专科学校 计算机工程系,成都 610071;2.四川师范大学 计算机科学学院,成都 610101)
在电力能源生产中,为了获得更高的发电效率,需要太阳能接收器正对太阳以获取最大的光通量,充分吸收光照。介绍了一种应用数字图像技术实现太阳能电池板正确定位以获取最大光照的方法。这种方法可以显著提高现有系统的定位精度,获得理论最大的光通量。
太阳能电池板;数字图像处理;定位
在太阳能发电中,需要随时调整太阳能电池板的位置使其正对太阳,从而获取最大的光通量。在传统的定位系统中,通常采用GPS对太阳能发电站进行定位,通过计算当前位置相对太阳的角度来调整太阳能电池板。这种方式是调用数据库中的经验参数对电池板位置进行调整,但是在实际运用中,光通量的变化会受到天气、大气折射等众多因素的影响,故无法提供最大化的光照通量。本文提出了一种利用数字图像处理来获取更精确定位的方式,可以显著提高定位精度,从而获得最大的光通量。
1 太阳能电池板定位系统概述
太阳能电池板的定位系统主要由检测控制系统以及机电驱动系统组成。检测系统用于测量当前太阳相对于电池板的位置,并通过计算得出控制信号;机电驱动系统接收控制信号并控制电机进行电池板位置的调整。在位置信号处理的过程中需要对太阳进行图像采样,计算其图像重心位置,由此来判断太阳和太阳能电池板位置的偏差,并进行调整。在数字图像处理的过程中可以利用虚拟仪器视觉与运动模块进行设计。
1.1 太阳能电池板定位系统硬件平台搭建
该系统中,可以利用USB接口的摄像装置完成对太阳位置图像的采样,为了避免强烈阳光对成像质量的影响并方便后期进行图像的二值化处理,需要在镜头前加装滤光片,降低太阳直射的光辐射通量。摄像头将采集的图像信息传递给计算机进行处理,计算机通过对图像进行运算后再将偏移的判定结果传递给机电驱动系统,以此来调节电池板的位置,在调整位置以后再次对当前的太阳位置进行采样,采样信息作为反馈信号输入计算机实现系统的闭环控制。系统的总体设计框架如图1所示。

图1 太阳能电池板定位系统的总体设计框图
1.2 太阳能电池板定位系统软件概述
系统的图像处理部分利用虚拟仪器中的视觉与运动模块完成[1],该模块包含了图像采集控制、数字图像的空域以及频域处理等多种内置的功能和函数,通过调用这些函数可以方便地识别出太阳的方位以及相对于太阳能电池板中心位置的偏移量。
1.3 太阳能电池板定位系统技术指标
此系统的定位精度与光学系统的参数有关,设计中采用的光学摄像头焦距为6.33~19.0 mm,在无限远物点时,取焦距为6.33 mm,CCD尺寸为1.016 cm,视场大小为77.3196°。CCD分辨率为3 072×2 304,故在成像后其太阳中心的定位精度在2'以内,在光学系统中2'以内的偏差对于光强度大小的影响可以忽略不计,因此,采用该系统可以使电池板获得理论最大的光照强度。
2 太阳能电池板定位系统算法的具体实现
在该项目中,太阳相对于电池板中心线的定位算法[2]需要经过图像采样、图像转换、图像增强、阈值分割、重心计算等步骤。其目的是得到太阳的位置(太阳在图像中成像的中心点)和电池板正对中心位置(图像的正中心)的偏移量,并以此来控制电机系统。
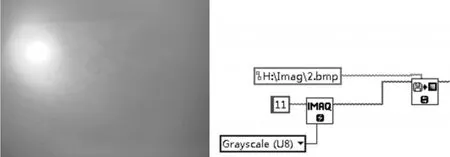
图2 灰度图像及其强行转换
摄像头采集图像数据后,由于只关心太阳相对于电池板中心线方位的位置,即图像中强度最大的为太阳的位置,故不需要考虑图像的色彩信息,图像由彩色图像转换为灰度图像。通过读取被采集图像时,加入定义信息可以强行把彩色图像转换为灰度图像,如图2所示。
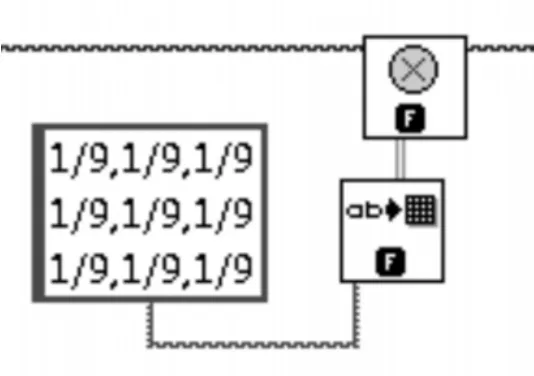
图3 空域均值滤波
在采样系统中不可避免地会引入噪声,在噪声的抑制中可以采用频域或者空域滤波,由于在FFT变换滤波中会在图像中产生一定的波纹,影响图像中强度最大点的判断,因此优选空域平滑滤波,如图3所示。
为了提取出太阳的位置需要对灰度图像进行阈值的分割[3],由于太阳和背景部分的灰度级别差异较大,为明显的两类灰度,故可以采用阈值分割方法,这里取阈值为235。如图4所示。
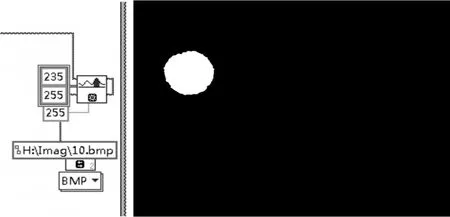
图4 图像的阈值分割
在提取了太阳图像后,太阳位置的灰度级别被定义为最大,非太阳位置的图像被定义为0灰度级别,此时图像的重心位置坐标为太阳的位置。此时太阳和电池板正对位置的坐标差可以通过计算得出,得到其偏移量用于电机的控制,从而调节其到正对太阳的位置。其偏移量的计算如图5所示。

图5 偏移量的数组计算及其结果
3 结语
本文叙述了太阳能电池板定位算法的一种实现方式[4],其核心部分主要由虚拟仪器的视觉与运动模块完成。从采集图像到图像的处理与关键参数的运算,都可以由一台带有摄像头的计算机完成,图像数据计算量小,运算处理快速,硬件要求低,是一种低成本的控制计算方法,并且可以通过函数的循环调用实现太阳位置的实时运算与跟踪[5]。
[1]李培江,李淑清,高华.基于LabVIEW的网络机器视觉检测系统[J].传感器与微系统,2007,26(8):26-28.
[2]毛义梅.虚拟仪器视觉系统的设计与实现[J].仪器仪表学报,2002(S1):192-193.
[3]齐龙,马旭,周海波.基于虚拟仪器技术的田间多光谱视觉系统设计[J].农业机械学报,2009(1):157-161.
[4]王鹏,赵彦玲,刘献礼,等.基于LabVIEW的机器视觉系统开发与应用[J].哈尔滨理工大学学报,2004(05):84-87.
[5]徐树英.基于虚拟仪器的机器视觉测量系统建模方法和图像处理算法研究[D].成都:四川大学,2005.
Research on Solar Panels Positioning System
YANG Yazhi1,2
(1.Computer Engineering Department,Chengdu Electromechanical College,Chengdu 610071,China;2.College of Computer Science,Sichuan Normal University,Chengdu 610101,China)
Solar energy as an environmental friendly non-polluting resource is widely used in power generation systems.In order to achieve higher power generation efficiency,solar receivers are required to achieve maximal solar flux and full absorption of light.This paper presents a method by digital image technology to obtain correct positions of solar panels to maximize illumination.By applying the presented approach,the positioning accuracy of the existing system can be significantly improved to obtain the theoretical maximum luminous flux.
Solar Panels;Digital Image Processing;Positioning
TP391.9
A
1008-5440(2011)03-0026-03
2011-06-08
杨雅志(1983-),男(汉族),四川崇州人,助教,在读硕士研究生,研究领域:计算机软件,教育技术学。
