转位机械臂捕获初始条件分析
2011-09-21胡雪平时军委沈晓鹏
胡雪平 时军委 沈晓鹏 刘 艳
(上海宇航系统工程研究所)
1 引言
空间站由核心舱和具有生活、实验等不同功能的舱段组成,核心舱前端是节点舱,空间站示意图见图1。大型轨道复合体一般分阶段实施,先发射一个具有节点舱段的核心舱,然后将具有不同功能和设备的舱段发射至太空,后续发射的舱段先与核心舱前端的节点舱实现轴向对接捕获、刚性连接。然后,根据需要,需转移到非轴向的其他对接口上,本文称这类舱段为待转舱。转位机构即用于待转舱的位置转移。
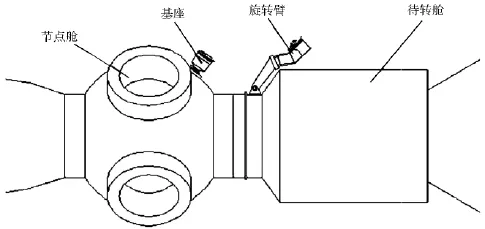
图1 空间站示意图
转位机械臂由压紧于待转舱的旋转臂、捕获锥,以及位于节点舱的匹配基座接纳锥等主要部分组成,转位机械臂示意图见图2[1]。
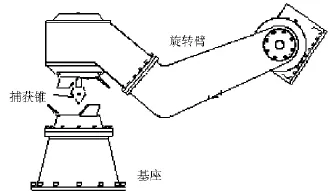
图2 转位机械臂示意图
转位机械臂(简称转臂)安装在待转舱体上,在待转舱与节点舱完成轴向对接后,转臂实现待转舱的侧向再对接。其中两个环节有较大误差,待转舱主动对接环与节点舱被动对接环之间有一定间隙,待转舱主动对接环轴向推出时有一定误差,这两个环节的误差使得转臂捕获锥捕获接纳锥时,在接纳锥端面形成一定形状的包络。包络中距离接纳锥端面圆心最远的距离,这个距离就是接纳锥半径设计的最小值,即接纳锥的设计半径应该能包住包络。如果包络尺寸较大,相应地,接纳锥的半径较大,因此,接纳锥的质量和体积会较大,这导致接纳锥的基座较大,而较大的基座会影响飞船的质量分布,考虑到振动的因素,将对飞船发射造成不利影响。因此,接纳锥半径的大小对转位机械臂方案的设计有重要的作用。
对接转位过程见表1。
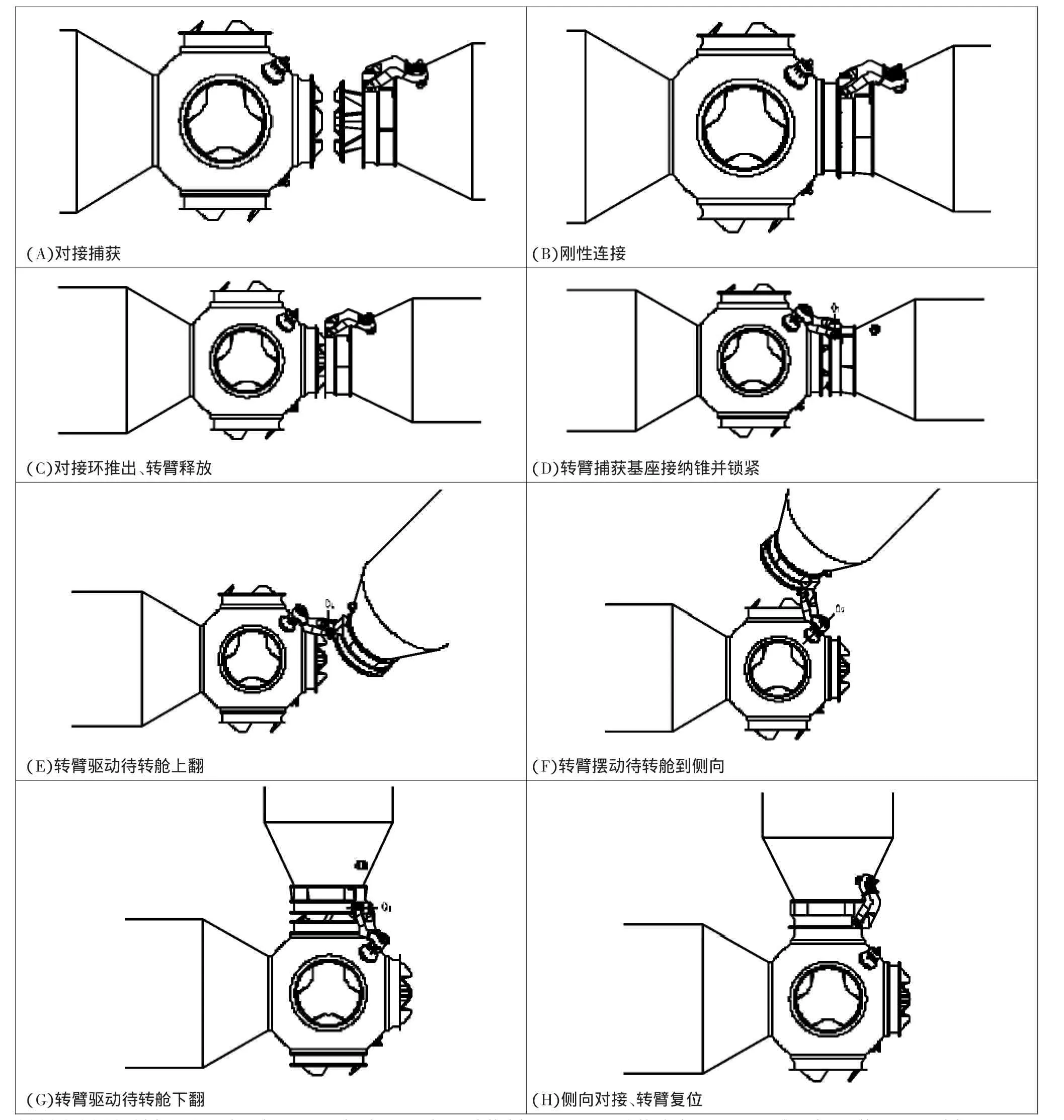
表1 对接转位过程
2 坐标系定义
坐标系示意图见图3、图4,图4是图3沿着A_A轴切开的剖面图。主动对接环坐标系O1X1Y1Z1,原点O1在主动对接环前端面中心,O1X1轴与待转舱体对称纵轴重合,指向飞行方向,O1Y1轴与O1X1轴垂直,指向对接机构第三象限,O1Z1轴由右手定则确定,该坐标系固结于待转舱。被动对接环坐标系O2X2Y2Z2,原点O2在被动对接环前端面中心,没有间隙的情况下,主被动对接环坐标系原点一致,坐标轴方向一致,但是,实际上主被动对接环在柔性连接的情况下,两者之间存在间隙,该间隙称为环环之间的间隙,在被动对接环坐标系上表示为(x0,y0,z0)以及(φ0,Ψ0,θ0)。
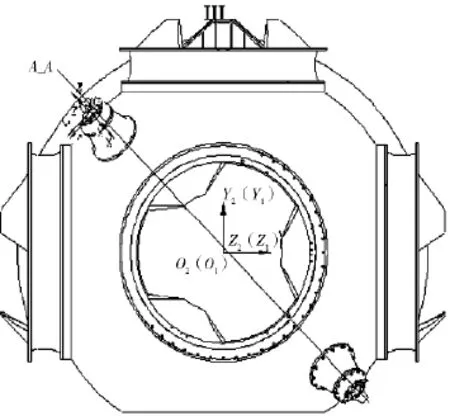
图3 坐标系示意图
主动对接框坐标系O1dX1dY1dZ1d固结于待转舱,原点在待转舱对接框端面中心。当推出主动对接环时,实际上与理论上环的推出高度会有偏差,称为推出偏差,表示为(x1,y1,z1)以及(φ1,Ψ1,θ1)。
捕获锥坐标系O′1X′1Y′1Z′1,原点O′1取在捕获锥头部球心,O′1X′1轴沿着捕获锥轴线,指向接纳锥的方向为正向,O′1Y′1轴垂直于剖面,O′1Z′1轴正方向如图 4 所示。接纳锥坐标系O′2X′2Y′2Z′2,原点O′2取在接纳锥外端面圆心,O′2X′2轴沿着接纳锥轴线,从转臂到接纳锥为正向,O′2Y′2轴垂直于剖面,O′2Z′2轴正方向如图4所示。
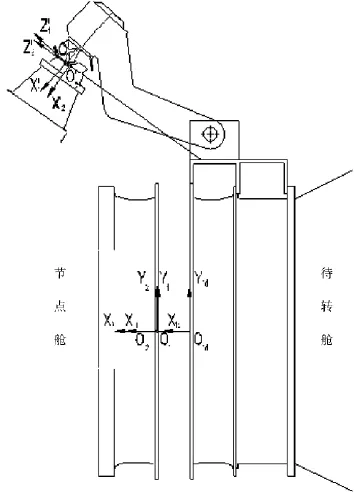
图4 A_A剖面示意图
3 转位机械臂的空间位置姿态关系
从任一坐标系OjXjYjZj到坐标系OkXkYkZk的三个姿态角按2-3-1的顺序给出,即Ψ为绕y轴的偏航角,θ为绕瞬时z轴的俯仰角,f为绕瞬时x轴的滚转角,如果设坐标系OjXjYjZj的基向量为坐标系OkXkYkZk的基向量为,则有[2]

其中,Akj称为坐标系间的姿态转换矩阵,


即

与2节所述各坐标系的原点相关的矢量关系图见图5,从捕获锥坐标系原点到接纳锥坐标系原点的矢量是待求的量,理论上,没有间隙和推出偏差的情况下,矢量在接纳锥坐标系的横轴Y和Z上的分量是0,考虑间隙和推出偏差范围内的组合情况,矢量在接纳锥坐标系的横轴Y和Z上的分量的关系,是设计接纳锥尺寸的基础。
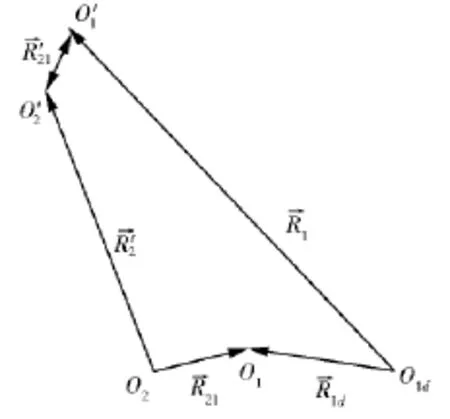
图5 矢量关系图
根据图5有,

设h是理论推出高度,推出偏差在主动对接环坐标系上的分量为(x1,y1,z1),那么在主动对接环坐标系中的表示是(x1+h,y1,z1),环环之间的间隙在被动对接环坐标系上的位移分量为(x0,y0,z0)。
A12为主被动对接环坐标系间的姿态转换矩阵,环环之间的间隙的角度分量为(Ψ0,θ0,φ0),Ψ0,θ0,φ0分别为y绕轴的偏航角,绕瞬时z轴的俯仰角,绕瞬时x轴的滚转角。A1d为主动对接环与主动对接框坐标系间的姿态转换矩阵,Ψ1,θ1,φ1分别为偏航角,俯仰角,滚转角。A22′为被动对接环坐标系与接纳锥坐标系间的姿态转换矩阵,Ψ2,θ2,φ2分别为偏航角,俯仰角,滚转角。
设是矢量在接纳锥坐标系O′2X′2Y′2Z′2上的分量是(x′,y′,z′),将上式在坐标系O2X2Y2Z2上分解得

两端左乘以A22′,得

最终推出,
4 转臂捕获锥捕获初始条件范围计算分析
由前面的分析可知,转位机械臂捕获锥捕获初始条件受环环之间的间隙以及对接环的推出精度两方面因素的影响,以下分别进行分析。
计算分析的输入条件见表2、表3。

表2 间隙范围
推出偏差范围见表3。

表3 推出偏差范围
根据3节所推导的公式,应用Matlab软件编程,输入间隙范围、推出偏差范围、相关的舱体尺寸等,得出单项间隙工况转臂捕获锥三个方向的捕获行程,复合工况的捕获行程,单项推出偏差工况的捕获行程,分别见表4~表6。建立对应的Adams模型,对相应的工况分别计算,计算值见表7~表9。

表4 Matlab程序单项间隙工况的捕获行程

表5 Matlab程序复合工况的捕获行程

表6 Matlab程序单项推出偏差工况的捕获行程

表7 Adams单项间隙工况的捕获行程

表8 Adams复合工况的捕获行程

表9 Adams单项推出偏差工况的捕获行程
分别对比表4与表7,即单项间隙因素下捕获行程的对比,表5与表8,即间隙因素与推出偏差因素综合情况下捕获行程的对比,表6与表9,即单项推出偏差因素下捕获行程的对比,结果表明Matlab计算值与Adams计算值差别在0.001mm。Matlab程序可以用来计算包络。设矢量在接纳锥坐标系横轴的分量是y和z,两者在接纳锥端面的包络曲线见图6。

图6 转臂捕获初始条件包络
图6表明,转臂捕获初始条件包络是对于原点偏的多边形曲线,z方向关于原点不对称主要是因为在捕获锥端点恰好位于接纳锥端面的状态下,捕获锥端点偏离接纳锥圆心,这个偏离值约是20.9,多边形包络关于(0.0,20.9)大约是对称的。图6中虚线所示的曲线是接纳锥的设计半径,最大约74.96,理论上,接纳锥的半径应当能够包住捕获初始条件包络。
图7是转臂捕获初始条件空间包络。
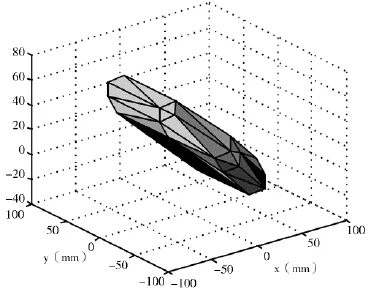
图7 转臂捕获初始条件空间包络
5 结论
对接环的推出精度、主被动环的间隙是转位机械臂捕获锥捕获初始条件偏差的主要来源;两者与捕获锥捕获初始条件偏差的关系由转臂的尺寸、舱体的尺寸决定。
捕获初始条件包络是对于原点偏的多边形曲线。为接纳锥半径的设计提供了依据;此分析结果为转位机械臂方案设计提供了重要参考。 ◇
[1]汤树人,陈宝东,柏合民等.对接转位机构末端抓手装置的创新设计[J].机械传动,2009
[2]洪嘉振.计算多体系统动力学[M].北京:高等教育出版社,1999
[3]袁士杰,吕哲勤.多刚体系统动力学[M].北京:北京理工大学出版社,1992
