自动转移飞行器的轨控总体方案
2011-09-18靳永强毕雨雯
靳永强,毕雨雯
(1.上海宇航系统工程研究所,上海 201108;2.上海空间电源研究所,上海 200245)
0 引言
ATV是欧空局(ESA)历时约20年研制的一种无人驾驶自动转移飞行器。2008年,第一艘儒勒◦凡尔纳号ATV发射升空并成功与国际空间站(ISS)对接,成为欧洲首个具有与ISS对接功能的飞行器[1]。ATV的主要任务是为ISS提供后勤补给、运送结构组件、补加推进剂、定期补偿ISS轨道衰减,以及搜集ISS的生活、试验垃圾并有效下行。欧洲的ATV综合了无人飞船的全自动工作能力和载人太空船对安全的需求。第一艘儒勒◦凡尔纳号ATV已在轨运行了近1年半,成功实现了与ISS的交会、接近和对接,完成了对国际空间站的运输货物、补充燃料、提升轨道等任务。轨道控制方案和技术是ATV制导、导航与控制(GNC)技术的重要组成,是相应任务完成的保障。欧空局在ATV研制过程中对轨道控制方案和技术开展了大量创新性研究。
为此,本文对ATV的轨控总体方案进行了综述。
1 ATV飞行方案
ATV由阿里安5-E火箭发射升空,进入转移轨道后进行轨道调相。之后ATV进行相对导航和控制,与俄罗斯服务模块对接。对接后的ATV能执行空间站的姿控功能、空间碎片躲避机动和抬高空间站的轨道以克服空气阻力的影响。每隔10~45 d,ATV的推进器将点火以抬高空间站的高度。一旦补给任务完成,充满废弃物的ATV将被乘员关闭,并自动分离。推进火箭将利用剩余的燃料使ATV离开轨道。与载人飞行器以适宜的再入角返回不同,ATV在太平洋上空以很陡的飞行路线执行受控自毁再入。整个ATV飞行任务的飞行阶段如图1所示。ATV GNC系统的飞行阶段划分以及各阶段采用的GNC如图2所示[2]。
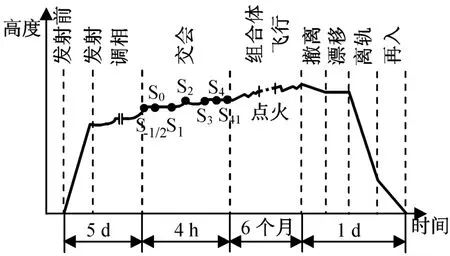
图1 ATV飞行阶段Fig.1 ATV mission phases synthesis
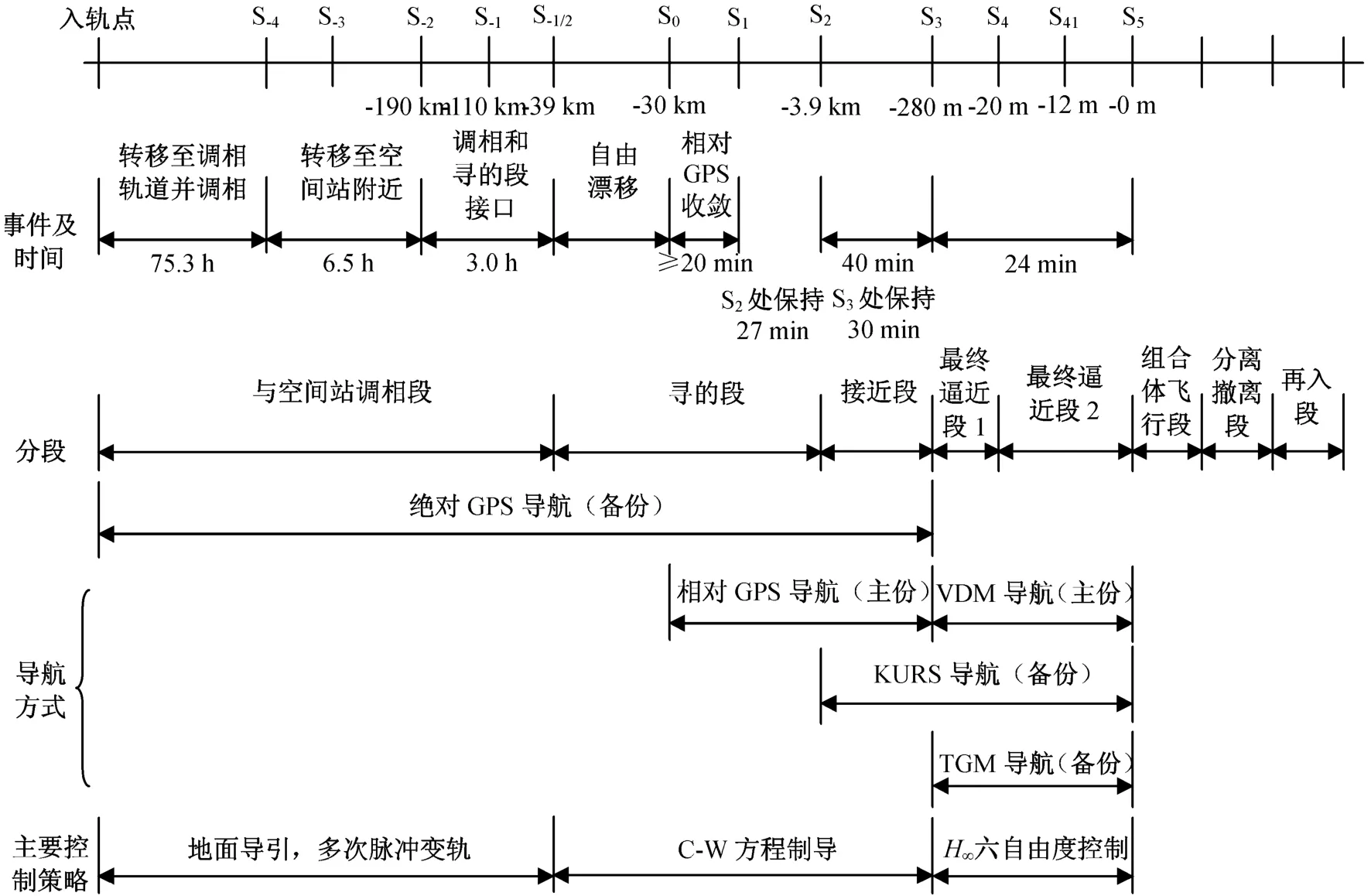
图2 ATV GNC系统的飞行程序Fig.2 Mission profileof ATV GNC system
ATV的GNC系统的飞行流程主要可分为发射及入轨段、与空间站调相段、交会段、组合体飞行段、分离和撤离段和再入段。
发射及入轨段:ATV由阿里安5-E运载火箭发射进入安全、适合交会的圆轨道。太阳电池阵展开,推进系统设置完成,所需的GNC传感器开机。至本阶段末,ATV已进入安全稳定状态,为下一阶段的任务做好准备。
与空间站调相段:ATV进行数次大推力轨道机动到达交会轨道,逐步与空间站减小相位差。在点火期间,ATV对姿态进行控制。到达点S-1/2(空间站后方39 km、下方5 km)后本阶段结束。
交会段:ATV作小推力变轨到达空间站附近,开始最终接近和对接。沿交会路径定义特征点:S0,距离空间站30 km;S1,寻的点火起始位置;状态保持停泊点,S2(相距3 900 m)、S3(相距280 m)、S4(相距20 m)、S41(相距12 m)。本阶段交会监视和碰撞规避(RMCA)功能激活。交会段中,点S-1/2、S2间为寻的段,点S2、S3间为接近段,点S3至对接间为最终逼近段。最终逼近段又可分为最终逼近段1、2。
组合体飞行段:ATV与空间站对接,进行相应的在轨服务。本阶段中ATV的GNC和交会监视和碰撞规避功能不使能。
分离和撤离段:ATV利用一次点火离开空间站。本阶段交会监视和碰撞规避功能最后一次开启。
再入段:离轨再入需两次点火,并进行大气层再入烧毁。
2 ATV的敏感器和执行机构配置
在入轨到再入的飞行过程中,ATV的控制由飞行控制系统完成。飞行控制系统决定ATV的飞行性能、飞行安全,以及飞行任务能否成功完成。ATV的GNC系统是飞行控制中的重要组成。GNC系统包括GNC硬件和软件,其中硬件部分又可分为GNC测量系统(GMS)和执行机构。ATV在交会对接过程中所需的测量敏感器和执行机构的配置见表1[3-4]。
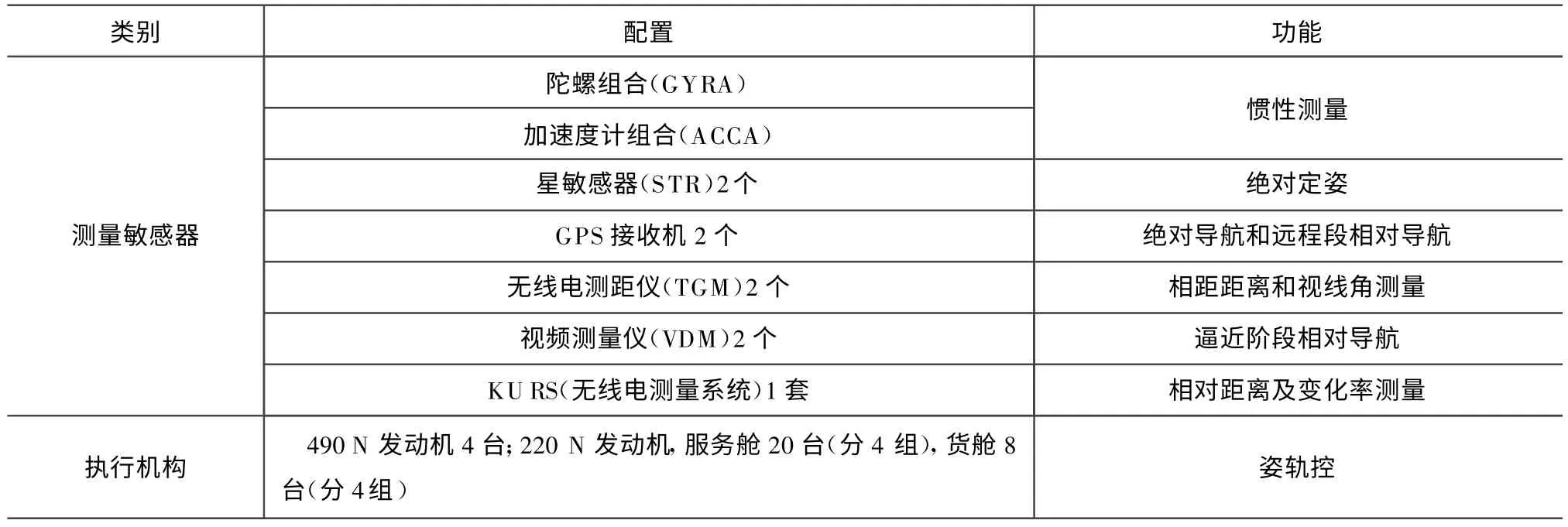
表1 ATV交会对接的GNC系统配置Tab.1 Composition of GNC system for ATV rendezvous and docking
2.1 测量敏感器
在ATV入轨到与空间站对接过程中,不同距离应用不同的测量敏感器。测量范围重合的敏感器可互为备份,如图3所示。
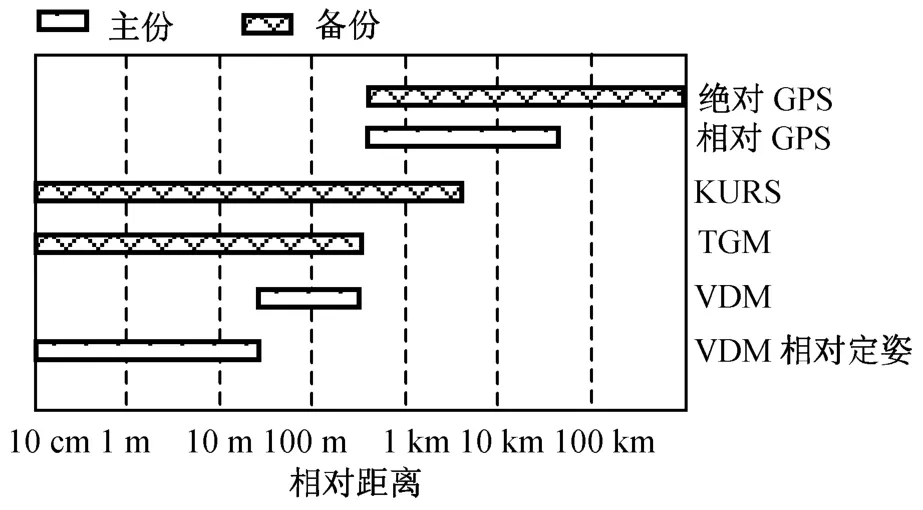
图3 GNC测量敏感器使用方案Fig.3 Configuration of GNCmeasurement sensors
GPS接收机由Laben研发,为ATV提供位置、速度和时间(PVT)测量量。由两个冗余组成,每个包含天线1个,低噪声放大器和接收机1个。
ACCA由EADSAstrium研发,输出速度测量量,监视ATV的轨道机动,在10 min热机后以频率10 Hz提供速度增量的测量量。其主要组成有:由同一基盘支撑的6个相同的单轴加速度计;3个相同并互相独立的电路通道,每个通道包含2个加速度计的全部条件函数(ACM)。
GYRA由EADS Astrium研发,提供绝对姿态导航和角速度测量量。GYRA包括4个相同的二轴动态调谐陀螺(DTG),每个安装在一个震动隔离器上,4个DTG安装在同一基盘上;2个陀螺电子单元嵌入式安装在2个相同且完全独立的电路通道中,每个电路通道包含DTG的整个条件函数。GYRA可运行于精模式(角速度可达2(°)/s)和粗模式(角速度可达30(°)/s)两种工作状态,在热机60 min后以频率10 Hz提供角速度增量的测量量。
STR由EADSSodern研发,测量ATV的惯性姿态并估计GYRA的漂移。STR利用测量设备(CCD矩阵)在一个二维平面内获得恒星的位置和星等测量信息。根据星历和模式识别算法获得航天器本体在J2000惯性参考系中的三轴姿态。即使在空间姿态失稳的状况,也能利用星历捕获姿态。STR可跟踪恒星并以频率5 Hz输出四元数。
VDM由EADS Sodern研发,基于视觉传感器技术。在最终逼近段,用一激光源照亮服务模块上的交会目标。VDM的CCD产生的图像经处理后可获得距离、视线角和相对姿态的测量信息。VDM主要由安装在ATV上的2个VDM和安装在ISS上的交会目标组成。交会目标由5个单独后向角反射器组成内侧目标,3组多个后向角反射器(MRR)组成外侧目标。
TGM以频率3 Hz输出距离、视线角(方位和俯仰),是一个基于激光测量的主动光电测量系统,由Dasa Jena Optronik研发。ATV上安装2个TGM,每个由电路单元1个和光学头部1个组成。TGM采用与VDM相同的交互目标,并只利用外侧目标。
2.2 ATV推力器管理算法
ATV共安装推力器32台,其中4台为推力490 N的主发动机,其余28台均为姿控发动机,同时也能提供轨道控制所需推力。对姿轨控共用发动机,ATV有其推力器的管理和选择算法,能自动选择效率最高的发动机,按控制系统要求产生所需姿控力矩和轨控推力[5-6]。推力器管理算法的本质是求解满足约束条件
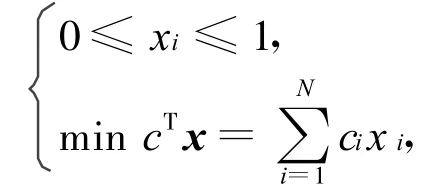
使等式Ax=b存在最优解x。此处:
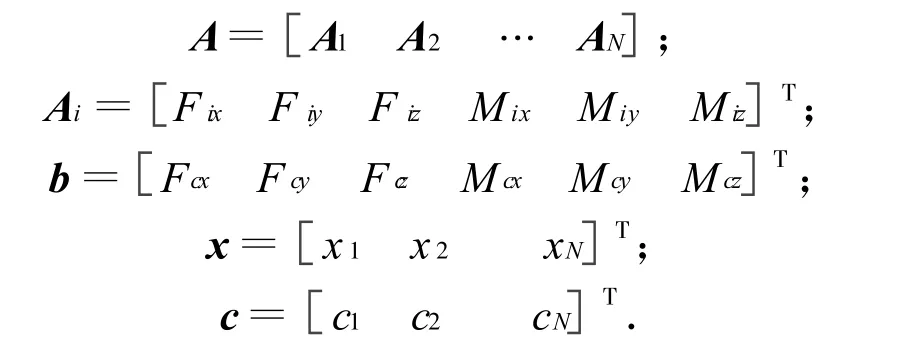
式中:Ai为第i个推力器工作产生的推力和力矩矢量;b为当前时刻姿控和轨控的平均控制力矩Mix,Miy,Miz和控制力Fix,Fiy,Fiz构成的矢量;xi为每个推力器的点火时间,且xi=Δti;x为由推力器点火时间构成的矢量;c为由推力器加权值构成的加权矢量;ci为每个推力器的加权值,反映了推力器的工作效率;i=1,2,…,N。约束条件反映了两个基本事实:每个推力器归一化的工作时间为正数,且推力器选择应使工作效率最高。如每个推力器均工作正常且效率相等,可设ci=1;如推力器的效率不等,一种简单而方便的设置权值方法是ci=1/Isp i。此处:Isp i为第i个发动机的比冲。这样可选择消耗燃料最少的推力器组合。另外,ci也可作为一个惩罚因子,以尽可能不选择或排除工作性能不佳的推力器。该数学问题可用Simplex方法求解。最终基于计算量的考虑,ATV的推力器管理和优化算法综合了最优目录法。
3 ATV各阶段轨控策略
3.1 与空间站调相段
与空间站调相段又可分为多个子阶段。入轨点至点S-4间向调相轨道的转移由2次点火和1个自由漂移段组成。2次点火分别为一大一小2个脉冲,第二个脉冲补偿第一个的误差(如图4中的Δv1,Δv2),同时调整ATV与ISS的轨道平面偏差(修正入轨误差和重力摄动误差等)。图4中;rev表示轨道周期。轨道机动后开始进行调相,此次调相需70.9 h。
调相完毕后,向ISS附近转移。点S-4至点S-3的转移用3个脉冲完成:第一个是纵向和平面外调整,第二个是平面外调整,第三个是纵向调整,如图4中的Δv3,Δv4,Δv5。再用相同方法从点S-3转移至点S-2,如图4中的Δv6,Δv7,Δv8。此策略的优点是将平面内的大部分调整和平面外的调整综合在一次脉冲中完成,能以相对较小的燃料消耗代价完成平面外调整。
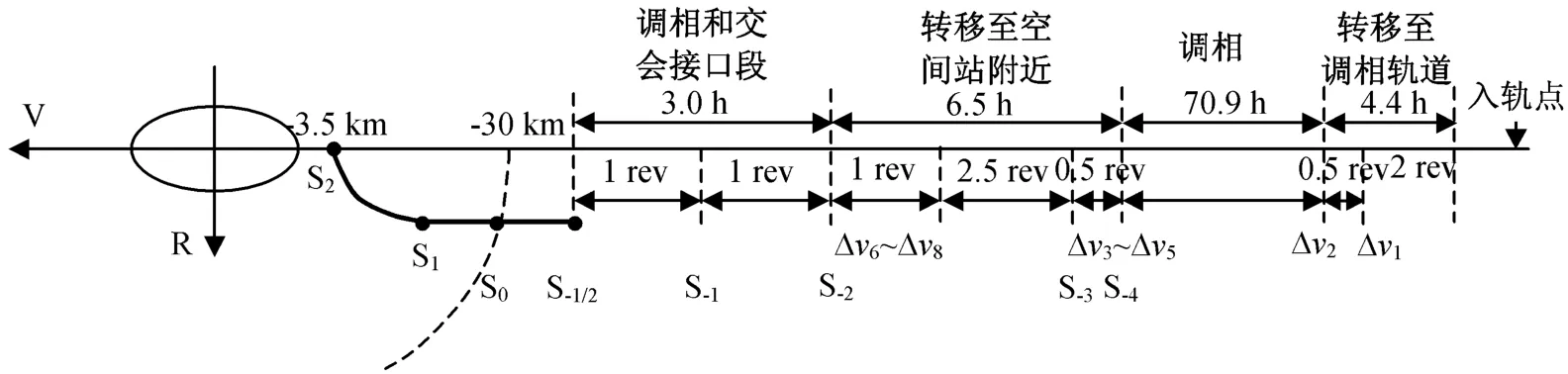
图4 ATV与空间站调相段Fig.4 ATV phasing sequence
调相段脉冲在开环条件下完成,难以保证在最后一个脉冲结束时达到点S0,或即使到达点S0,但位置和速度散布无法满足相对GPS收敛和寻的段的安全要求。因此,在调相段和交会段间插入一个调相和交会接口段[7]。其间插入3个小修正,保证精度能满足相对GPS收敛和寻的段的安全性要求,此阶段如图5所示。
3.2 寻的段和接近段
在相对距离30 km处,ATV与ISS建立星间通信链路,相对GPS开机。经一段时间进入稳态后,开始以相对GPS作为相对导航方式。相对GPS收敛的时间不少于20 min。

图5 调相和交会段接口示意Fig.5 Phasing and rendezvous interface scenario
寻的段和接近段的相对轨道控制策略基于CW线性化方程,未考虑空间站的偏心率、J2项摄动或差分大气阻力,采用4脉冲控制。由控制策略计算获得推力的大小和方向,根据推力器的管理和选择算法选择最适于生成此次控制推力的推力器,并计算点火时间。该控制策略工作于开环模式,事先算得的推力大小和方向在推力器点火期间不再根据相对GPS的估值继续更新。接近段四脉冲轨控如图6所示[7]。
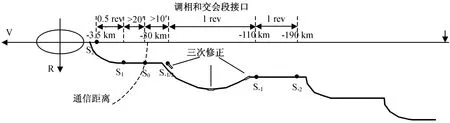
图6 四脉冲轨控示意Fig.6 Four-boost relative orbit control scenario
3.3 最终逼近段
本阶段ATV以V-bar策略逼近空间站,在点S3、S4间,ATV的姿态为当地水平定向,在点S4、S5间保持与空间站对接口的相对姿态指向,并进行平移完成与空间站的对接。在点S4、S41处分别进行2次状态保持。在最终逼近段,ATV除受常规的轨道摄动外,ISS由于bang-bang闭环姿态控制导致的极限环而存在参与姿态运动。由于ISS的尺寸,此微小的姿态运动被显著放大,姿态振荡1°将导致接口产生数十厘米的移动,而ATV本身的GNC系统也受传感器、执行机构、液体晃动以及太阳帆板挠性的限制和影响。为保证最终平移靠拢段的精度、足够的稳定裕度和鲁棒性,采用H∞控制策略[8]。该策略保持了标准比例积分微分(PID)控制器频带适应范围广和调节方便的优点,成功地用于ATV。
4 结束语
本文对ATV的轨道控制技术进行了综述,ATV的轨道控制方案和技术值得在相关项目的研发中借鉴。
[1]BAIZE L,VANHOVE M,FLAGEL P,et al.The ATV“Jules Verne”supplies the ISS[C]//Proceedings of SpaceOps 2008 Conference.Herdelberg:ESA,EUMETSAT and AIAA,2008:1-8.
[2]CAVROIS B,REYNAUD S,PERSONNEG,et al.ATV GNCand safety functions synthesis:overall design,main performances and operations[C]//AIAA Guidance,Navigation and Control Conference and Exhibit,Hawaii:AIAA,2008:1-22.
[3]NARMADA X.ATV far rendezvous navigation based on relative GPS[C]//ION GNSS Congress,18thInternational Technical Meeting of the Satellite Division.Long Beach:[s.n.],2005:1160-1166.
[4]PAUL D C,STEIN S.ATV videometer qualification[C]//55th International Astronautical Congress.Vancouver:IAC,2004:1-9.
[5]MARTEL F.Optimal simultaneous 6 axis command of a space vehicle with a precomputed thruster selection catalogue table[C]//Astrodynamics Specialist Conference.Big Sky:AAS,2003,03-587:1367-1375.
[6]SILVA N.MARTEL F.DELPY P.Automated transfer vehicle thruster selection and management function[C]//6th International ESA conference on GNC systems.Loutraki:ESA,2005:1-10.
[7]DELAGE R,WASBAUER J J,CORNIER D.An overview of ATV integrated mission analysis and mission preparation[C]//54th International Astronautical Congress of the International Astronautical Federation.Bremen:IAC,2003:1-9.
[8]BOURDON J,DELPY P,GANET M,et al.Application of Hinfinity design on ATV control loop during the rendezvous phase[C]//5th International ESA conference on GNC systems.Frascati:ESA,2002:289-296.