对接机构分系统研制
2011-09-18陈宝东郑云青邵济明
陈宝东,郑云青,邵济明,陈 萌
(上海宇航系统工程研究所,上海 201108)
0 引言
对接机构是神舟八号飞船和天宫一号目标飞行器实现交会对接的关键之一,是我国空间站建造的必要条件。为神舟八号飞船研制的对接机构由上万个零件组成,是目前我国航天器在轨使用的最复杂的空间机构之一。其任务是在规定的对接初始条件范围内,实现与目标飞行器的对接、保持对接和安全分离。
本文介绍了我国神舟八号飞船和天宫一号目标飞行器对接机构分系统及其研制。
1 对接机构分系统设计
1.1 对接机构分系统组成
根据产品,对接机构分系统由机械组件、控制器、驱动器和控温仪4台单机构成,其中机械组件采用导向瓣内翻的异体同构周边式构型。飞船对接机构机械组件安装在轨道舱的前端面,目标飞行器对接机构机械组件(纯被动)安装在实验舱的前端面。两对接机构共同完成两飞行器间的对接、保持对接和分离任务,具有捕获、缓冲、校正、拉回、锁紧、密封和分离等功能。
飞船对接机构机械组件的对接环和对接框通过丝杠6根、丝杠联系组合、差动组合等形成的传动缓冲系统连接,捕获锁3个安装在对接环上,对接锁12套、分离推杆2个和电路浮动断接器4路安装在对接框外侧,密封圈2道安装在对接框对接面,如图1所示。

图1 神舟八号飞船对接机构组成Fig.1 Structure of docking mechanism for Shenzhou-8 spaceship
目标飞行器对接机构机械组件的对接环与对接框固连,卡板器3个安装在对接框内侧,对接锁、分离推杆和电路浮动断接器安装在对接框外侧,如图2所示。

图2 天宫一号目标飞行器对接机构组成Fig.2 Structure of docking mechanism f or Tiangong-1 target spacecraft
对接机构的控制器、驱动器和控温仪安装在轨道舱内部,承担了指令传输、驱动控制、参数采集和温度控制等任务。其中:控制器的主要功能是完成自动控制,根据飞船自动控制指令,按机械组件当前状态进行逻辑分析处理,向驱动器发出机构动作的控制信号;驱动器接收到控制信号后,驱动电机或电磁拖动机构动作,完成对机械组件的运动控制;控温仪采集和传输机械组件、控制器、驱动器,以及控温仪的温度信号,并对机械组件进行主动控温,具备在轨注入功能,可改变温度控制值或断开/闭合指定的控温回路。
1.2 控制时序设计
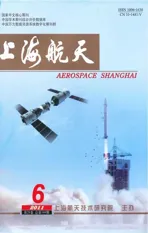
对接机构的控制时序是根据飞船和目标飞行器的工作时序,在测控弧度内工作。其中对接准备是在400 m停靠段进行,包括对接机构加电自检、对接环推出到准备对接位置。对接准备过程的时序如图3所示。
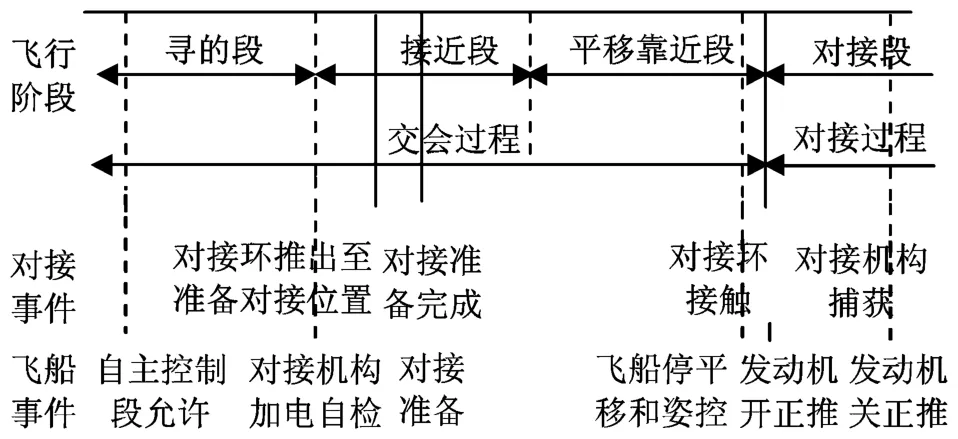
图3 对接准备时序Fig.3 Scheduling of docking preparing
在经过140 m和30 m停靠后,飞船继续与目标飞行器交会,直至两对接机构的对接环接触,进入对接过程。对接过程包括接触、捕获、缓冲校正、拉近和锁紧等,其过程如图4所示。
在组合体任务完成后,进入分离程序,其过程包括驱动器的驱动电路加电、对接机构自检、对接锁解锁和解锁后的机构复位等,如图5所示。
图4 对接过程时序Fig.4 Scheduling of docking course
1.3 设计方案
1.3.1 捕获功能
两飞行器近距离交会至满足对接初始条件后,在一定的相对速度下,两对接机构对接环相互接触碰撞,两对接环相互插入,完成两飞行器初始导向。当两对接环端面逐渐靠近后,捕获锁与卡板器捕获。

图5 分离过程时序Fig.5 Scheduling of separating course
1.3.2 推出拉近功能
由飞船对接机构的传动缓冲系统通过电机驱动,使6根丝杠运动,从而在对接前将对接环推出,或在缓冲校正后将对接环拉近。
1.3.3 缓冲校正功能
通过飞船对接机构传动缓冲子系统的弹簧、阻尼、摩擦等元件缓冲飞行器间的碰撞载荷,消耗碰撞能量,校正两飞行器间的相对位置和姿态偏差。
1.3.4 锁紧功能
两飞行器拉近至端面接近位置时,通过飞船对接机构的对接锁锁紧目标飞行器的对接锁,实现两飞行器的刚性连接。
紧急情况下,也可通过目标飞行器对接机构的对接锁锁紧飞行器的对接锁,实现两飞行器的刚性连接。
1.3.5 密封功能
锁紧过程中,安装在对接面的密封圈被压缩、压紧,使对接机构间形成一密封对接通道。同时,电路浮动断接器也被自动连接,实现电路连通。
1.3.6 分离功能
组合体任务完成后,对接锁解锁,解除两飞行器间的连接,分离推杆将两飞行器推开,实现分离,并提供一定的分离速度。紧急情况下,也可通过起爆火工品解锁对接锁,实现分离。
1.3.7 控制功能
载人飞船对接机构对接分离控制设置了自动控制和手动控制两种模式,两种控制模式相互独立。对接机构分系统设置了必要的遥控、程控、手控指令以处理对接与分离过程中的故障。
1.4 可靠性与安全性
根据对接、保持对接和分离任务要求,对接机构分系统进行了功能分析,针对分系统各工作环节开展了可靠性和安全性设计及验证。
1.4.1 可靠性
a)系统设计中主要考虑功能冗余,采用自动控制和手动控制方式控制对接过程。考虑分离的重要性,采取冗余设计方案。其中,捕获锁和对接锁解锁均采用3种解锁方式。采取的冗余措施提高了任务完成的可靠性。
b)对接机构在驱动和测量环节采用冗余设计,如主驱动组合和对接锁驱动组合为双电机驱动,电磁拖动机构为双线圈驱动,传感器为多触点冗余或多个开关冗余等。对不能采用冗余设计的结构和机构,采用强度安全裕度和驱动裕度设计以保证工作可靠。
c)为保证两对接机构的互换性和有温差时的对接,对接机构相互匹配部分采用容差设计,并考虑产品因热变形产生的尺寸变化,保证在有温差时仍能可靠对接。
d)控制单机采用功能模块冗余和局部电路冗余综合的方式,如双电源模块、多个CPU系统表决、局部电路电容串联和电阻并联等。
1.4.2 安全性
根据对接机构分系统在轨任务与状态分析,涉及航天员的安全性工作阶段主要在组合体飞行段和分离段,与对接机构机械组件的承载能力、密封能力和安全分离等功能及性能有关。涉及设备安全性的主要是控制分系统的安全性设计(故障隔离设计),避免控制分系统对飞船其他分系统造成危险。
针对航天员安全性,按一般危险源和故障危险源对对接机构分系统的危险源进行分类,并就安全性设计提出应对措施。对识别的危险,分系统采用消除危险、危险最小化、应用安全装置控制危险、用报警装置控制危险、用特殊规程控制危险等措施消除或控制危险。主要安全性设计措施有:
a)捕获锁解锁前,先卸载作用于捕获锁的载荷,捕获锁电机驱动模块有足够的降额,提高捕获锁电动解锁的可靠性。
b)捕获锁设置手动解锁机构,当电动解锁失效时,可通过航天员手动解锁。手动解锁机构考虑了航天员操作的可行性。
c)当捕获锁无法解锁时,可起爆目标飞行器对接机构卡板器上的火工品,解除捕获锁与卡板器间的连接状态,实现解锁。
d)对接锁电动解锁失败时,可用火工品解锁,确保对接锁能解锁,实现可靠分离。
2 对接机构分系统关键技术
2.1 总体设计
对接机构是集机、电、热、控制等多学科为一体的复杂空间机构产品。因对接是碰撞和机构运动的复合过程,设计中须综合考虑并掌握对接机构的力学参数、结构布局等总体参数设计技术,保证对接动力学和机构动力学的要求。同时,在满足对接要求的前提下,须考虑高低温、热真空等空间环境,加工精度等因素对对接机构的精度设计、分配和保证的影响。
通过对接机构的对接时序、总体参数、结构布局、载荷、强度、精度、热环境的适应性设计,并与动力学仿真结果不断迭代,按设计——仿真——再设计——再仿真流程,确定对接机构的性能和载荷等总体参数。
2.2 动力学仿真
对接首先是两飞行器间的接触和碰撞,而刚体碰撞的精确求解还处于理论研究阶段,无法直接用于工程,另外因机构的摩擦、润滑、间隙、温度的影响,传动链的局部接触和碰撞等难以建立模型,致使保证复杂机构动力学模型精度的难度高,数值计算结果误差较大,对接机构的动力学仿真困难。
在关键技术攻关中,仿真先行,基于掌握的对接原理,利用初步确定的基本参数,建立了对接动力学碰撞模型和对接机构数值样机模型,对对接动力学进行仿真,确定对接机构的缓冲参数,为机构的详细设计和参数修正、与试验结果的对比和验证提供了重要依据。
2.3 试验
对接机构具有大量的活动部件同步协调工作,以保证两飞行器在对接初始条件范围内可靠对接。由于航天产品的地面试验子样少、可靠性安全性要求高等特殊要求,真实模拟在轨工作状态,并通过有限的产品与试验充分验证对接机构在各种环境中的性能和功能成为技术难点。
为充分验证对接机构的设计和工艺,设计了对接机构的试验方案,分别按分系统、单机、部件和材料级等不同级别进行试验验证。其中:分系统试验主要是验证各单机的机电匹配性、机电产品协调工作,以及自动对接与分离时序的正确性和故障模式下对策的可行性等;单机和部件试验主要是试验验证单机和部件的主要性能与功能,考核其性能的一致性、稳定性,以及对振动、冲击、高低温、热真空等空间环境的适应性。
研制中,提前进行了整机特性台、对接缓冲试验台、对接综合台和热真空试验台等大型试验设备的方案论证与设计。试验设备的提前启动,保证了对接机构试验能及时进行,为确保对接机构的工程研制进度奠定了基础。
2.4 关键部件研制
对接机构包括大量的部件,如捕获锁、对接锁、摩擦制动器、电磁阻尼器和电路浮动断接器等。这些部件在不同工作过程的功能各异,性能要求甚至相互矛盾。如摩擦制动器,在对接环推出时需要其打滑力矩较大,以保证具足够能力驱动传动链的阻力,而在缓冲时则要求其有较小的打滑力矩,以保证对接环的适应能力更佳。因此,须通过合理的设计,充分的试验验证保证产品在不同过程的性能,保证对接机构可靠工作。
3 试验验证
对接机构分系统的验证试验分为两类:一是通用试验,如振动、冲击、热循环、热真空等试验,以验证对接机构的环境适应能力;二是针对对接机构研制进行的专项试验,如整机特性测试、捕获缓冲和连接分离试验、对接综合试验、热真空对接与分离试验,以及可靠性试验和寿命试验等,以验证对接机构的设计和工艺的可行性与正确性。通过对试验过程中暴露的问题进行改进,以及再试验验证,实现了对接机构的可靠性增长,提高了产品的可靠性。
3.1 整机特性测试
整机特性测试是机械组件在出厂后及各种环境试验后必须进行的性能测试,其中包括等效性能、捕获锁的捕获力/分离力等测试。整机特性测试台如图6所示。对经振动试验、热循环试验、热真空对接与分离全过程试验前后的机械组件进行整机特性测试的结果表明性能一致性好,说明机械组件能经受力学环境和热环境的考验。
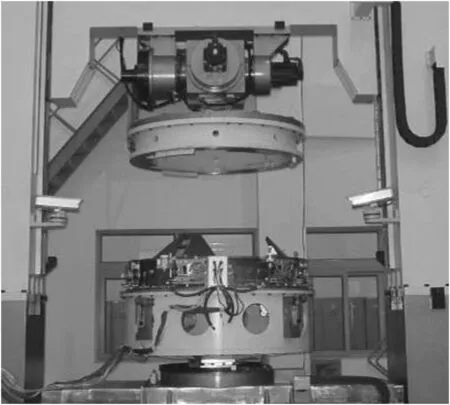
图6 整机特性测试台Fig.6 Test system of docking mechanism
3.2 连接分离试验
连接分离试验的目的是验证对接机构连接分离性能参数设计的正确性,考核对接机构主、被动机械组件在设定故障条件下连接及分离的功能与性能,考核连接分离的可靠性。
连接分离试验在对接缓冲试验台上进行,是对分离过程的全物理模拟。对接缓冲试验台以实物方式模拟主动飞行器和被动飞行器的质量特性,对接机构产品安装在飞行器模拟件上,完成连接分离过程。对接缓冲试验台如图7所示。
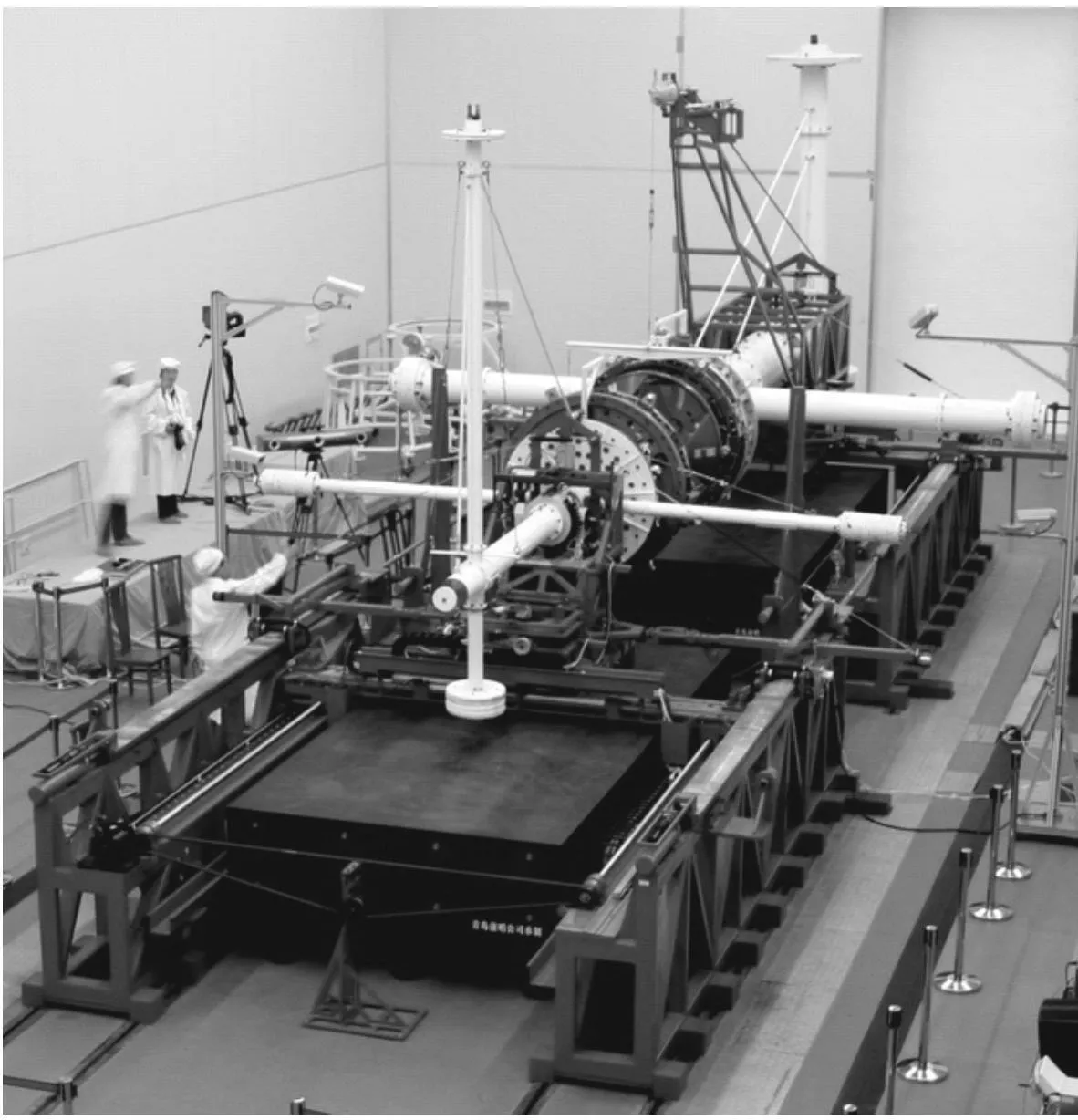
图7 对接缓冲试验台Fig.7 Docking platform test system
3.3 对接综合试验
对接综合试验的目的是验证对接机构在常温和高低温环境中各种对接初始工况条件下的捕获与缓冲能力。
对接综合试验在对接机构综合试验台上进行,采用半物理仿真的方法实时模拟两飞行器在设定对接初始条件下的对接动力学过程。其中主动机械组件安装在综合台的上平台,被动机械组件安装在运动模拟器上,均为真实产品。两飞行器的质量、惯量特性和飞行器姿控系统作用采用数学模型模拟,由六自由度运动模拟器实现两飞行器的相对运动。两飞行器接触前的相对运动根据交会的对接初始条件给出,两个对接飞行器接触后的相对运动由六维力传感器测得,相互作用力由数学模型实时计算获得。对接机构综合试验台如图8所示。

图8 对接综合试验台Fig.8 Docking general test stand
利用对接机构综合试验会完成了多种初始条件、温度条件偏差下的对接综合试验,充分验证并摸索了对接机构的捕获缓冲能力,为交会对接任务的成功奠定了坚实基础。
3.4 热真空对接与分离试验
热真空对接与分离试验的目的是在热真空环境条件下,考核对接机构机械组件对接与分离全过程的功能及性能满足状况,验证机械组件对热真空环境的适应能力和主、被动对接机构有温差时的对接能力。
热真空试验时将对接机构置于热真空试验台上,整体吊入真空罐进行试验。该试验能模拟两飞行器对接纵向等效质量,可以设定一定的对接初始条件,实现主、被动对接机构的碰撞、捕获、缓冲、校正、拉近、锁紧与分离的全过程。热真空试验台如图9所示。
热真空对接与分离试验验证结果表明对接机构机械组件具有适应热真空环境的能力,可在热真空环境中完成对接与分离任务,经历热真空温度循环后机械组件性能稳定,与试验前无明显差异;主、被动对接机构有温差时仍能可靠对接。
4 研制情况
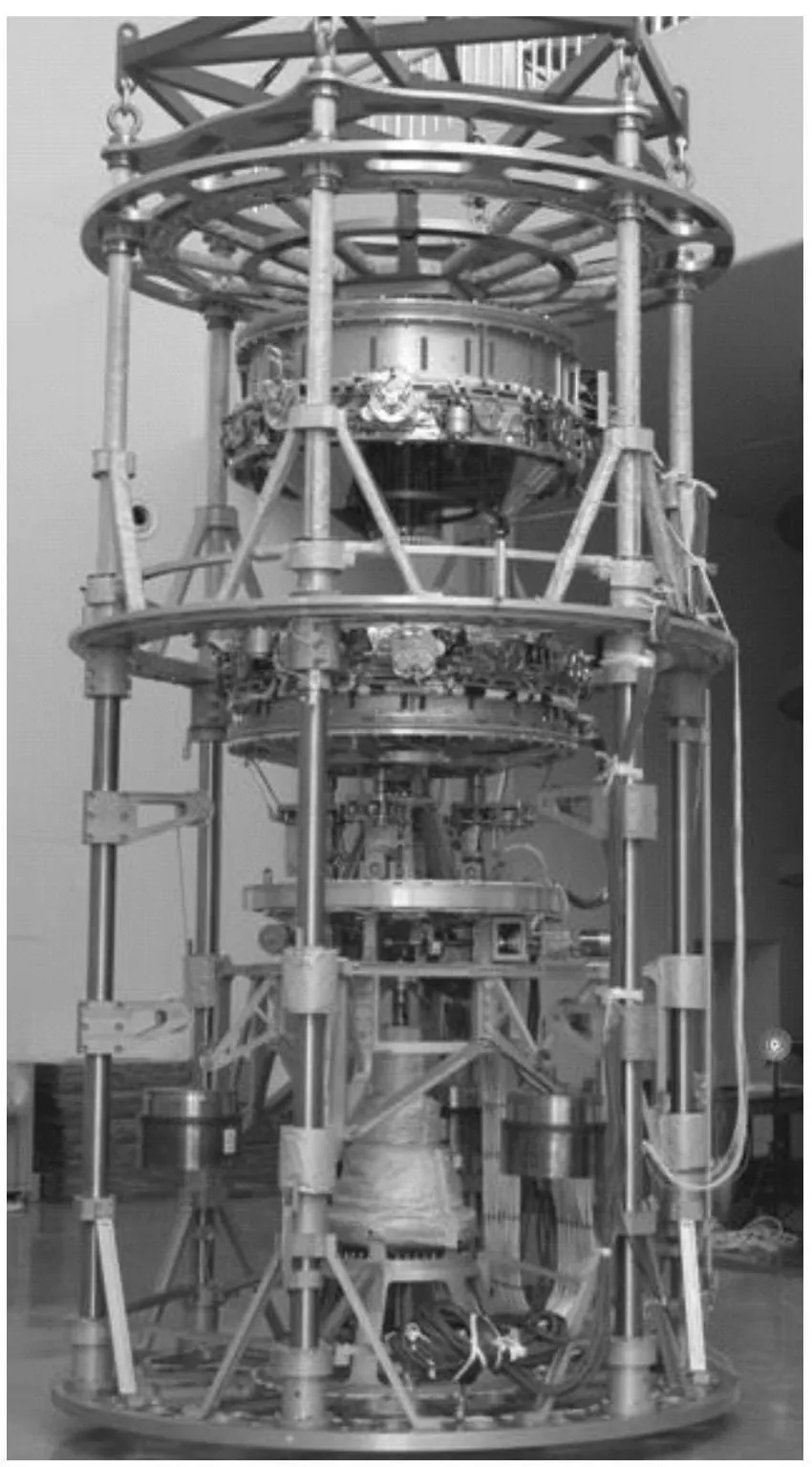
图9 对接机构热真空试验台Fig.9 Docking test system in thermal vacuum
根据中国载人航天战略要求,从1994年起开展对接机构的论证,1996年完成对接机构缓冲系统试验样机,1998年完成对接机构原理样机,2000年完成对接机构原理样机改装和试验。2001年,开展了攻关样机设计、攻关样机研制、动力学仿真和试验等关键技术,以及捕获锁、对接锁、摩擦制动器、电磁阻尼器、电路浮动断接器等8个部件和润滑、密封两项技术的攻关。通过关键技术攻关初步确定了对接机构的基本参数和结构尺寸,掌握了对接机构总体设计技术和对接动力学仿真方法,并通过试验验证初步掌握了对接机构地面试验的方法,突破了8个关键部件的研制技术和润滑、密封技术,攻关阶段的总体设计与仿真分析方法。2 005年3月,对接机构分系统进入方案研制阶段,通过了方案样机整机特性测试、电系统测试,并完成了补充的关键技术攻关。2006年9月,对接机构分系统转入初样研制阶段,完成了全部的力学环境鉴定试验,完成了各种初样条件偏差下的捕获缓冲试验和连接分离试验。对接机构分系统的各项试验结果表明:对接机构分系统能适应飞行过程中各种载荷和环境条件;能完成捕获缓冲、连接密封和分离功能;同一产品在经历各种环境条件后,性能无明显变化,保持相对的稳定。2009年12月16日,通过了神舟八号飞船对接机构分系统初样转正样院级评审。2011年11月3日,成功实现了神舟八号飞船和天宫一号目标飞行器的首次在轨对接。
5 结束语
神舟八号飞船和天宫一号目标飞行器的对接机构分系统采用异体同构周边式构型方案,具捕获、缓冲、校正、拉近、锁紧、密封和分离等功能。研制过程中充分重视产品的可靠性和安全性,进行了大量的地面试验验证。从预先研究到工程研制,历时17年,终于实现了在轨的成功对接。这标志着我国突破了空间站建造的关键技术,成为世界上第三个独立掌握交会对接技术的国家,也为后续月球采样返回、载人登月,以及深空探测用对接机构的研制奠定了技术基础。