基于模糊控制的高速机车横向半主动控制研究
2011-09-17周洪涛杨绍普朱红霞
周洪涛,杨绍普,朱红霞
(石家庄铁道大学 机械工程学院,石家庄 050043)
随着列车运营速度的不断提升,机车的振动性能随着运行速度的提高而面临新的挑战。轨道不平顺,空气动力和风力,机车车体轻量化特点以及本身存在的缺陷等因素是机车振动增大的主要原因[1]。采用车体控制技术来提高列车运行平稳性和乘客舒适性是现阶段研究的热点。由于半主动悬挂系统在控制效果上接近于主动悬挂系统,且结构简单,无须力源,能量损耗小,可使整个系统小型化和轻量化,因此受到广大学者的关注[2-4]。由于传统的半主动阻尼器大多不能实现阻尼力快速连续调节,以磁流变液为工作介质的阻尼器在外加磁场作用下,其阻尼力可在几毫秒之内实现无级调节,适合于实时控制,且能耗非常低,因此在减小高速机车振动方面有着广泛的应用前景[5,6]。
在半主动控制领域中有很多种控制方法,诸如,天棚阻尼控制、线性最优控制[7]、统计最优控制、智能控制等等。由于天棚阻尼控制得到的阻尼力是近似值,线性最优控制的实施高度依赖系统模型的准确性,统计最优控制在线确定最优步长有困难[3],所以限制了它们在机车半主动控制中的应用。
为解决上述问题,本文建立基于磁流变阻尼器的三自由度机车横向动力学模型,采用基于一般模糊控制的量化因子、比例因子的参数自适应模糊控制策略进行动力学仿真运算。通过对一般模糊控制的量化因子和比例因子的在线调整,有效实时地控制磁流变阻尼器所需的电流值,从而能有效控制机车横向振动,提高机车运行平稳性和乘客舒适性。
1 磁流变阻尼器
由于磁流变效应复杂性,目前存在很多磁流变阻尼器力学计算模型[8],例如 Bingham 模型,Herschel-Bulkley粘塑性模型,Bouc-Wen模型,修正的Bouc-Wen模型,Dahl模型等等。在研究磁流变阻尼器的方法中,应用最多的是实验法,即根据实验数据,采用各种优化方法建立磁流变阻尼器的动力学模型[8,9]。由于Bouc-Wen模型具有光滑过渡曲线,易于进行数值计算、通用性强,因此本文采用文献[10] 提出的修正的Bouc-Wen力学模型进行仿真分析。其力学模型如图1所示。
磁流变阻尼器产生的阻尼力可由图1得出,

图1 磁流变阻尼器的修正Bouc-Wen力学模型Fig.1 Modified Bouc-Wen model of the magnetorheological damper

式中,参数z为滞变位移量,表达式为:

参数α为滞变位移系数,参数A和α为加载在阻尼器上励磁电流I的函数。

参数c0、γ、β对于固定的磁流变液和阻尼器是常数,通过实验验证,可以分别取值为600、500和1 000,通过仿真可以得到阻尼力-速度的滞回关系和阻尼力-位移关系曲线如图2和图3所示。在SIMULLINK环境中建立其数学模型,并封装成子系统如图4所示。其中输入为机车横向加速度α,速度v和电流I,输出为磁流变阻尼器的阻尼力F。
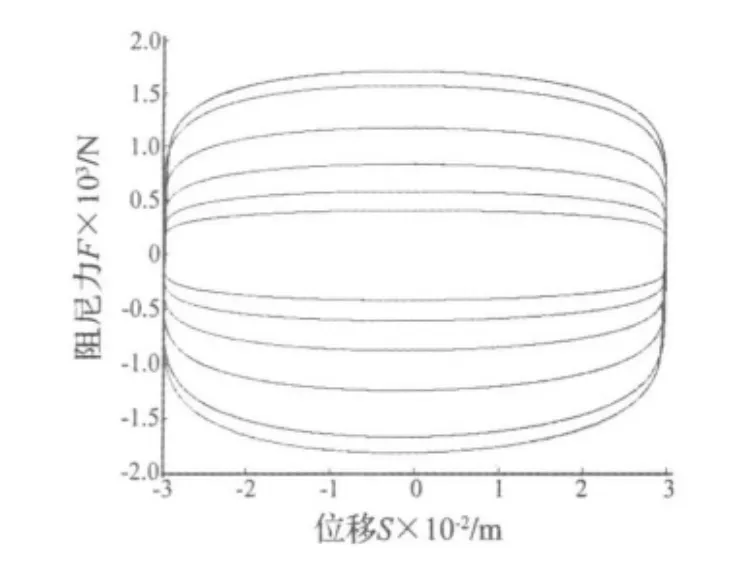
图2 阻尼力-位移关系曲线Fig.2 Relationship curve of force-displacement

图3 阻尼力-速度滞回关系曲线Fig.3 Hysteresis relationship curve of force-velocity

图4 磁流变阻尼器力学仿真模型Fig.4 Mechanical simulation model of the magnetorheological damper
2 机车横向半主动悬挂系统模型
本文采用基于磁流变阻尼器的三自由度机车横向悬架系统模型[10],该模型以横摇振动为研究对象,其力学模型如图5所示。悬架系统的三个自由度分别为:转向架横移x1、车体横移x2和车体侧滚φ。激励为轨道不平顺,在此模型中体现在施加在机车车辆的扰动位移xr。其运动方程为:


图5 机车车辆横向动力学模型Fig.5 Lateral dynamic model of the locomotive
式中:m1为转向架质量;m2为车体质量;Ir为车体横摇转动惯量;k2为每台转向架一系弹簧的横向刚度;k1为每台转向架二系弹簧的横向刚度;k3为二系弹簧的垂直刚度;2b为垂直方向二系弹簧的横向间距;h1为横向的二系弹簧中心到车体重心的高度;h2为磁流变阻尼器到车体重心的高度;F为磁流变阻尼器的阻尼力。

图6 机车半主动悬挂系统仿真图Fig.6 Simulation diagram of the locomotive semi-active suspension system
在Matlab/Simulink环境中建立机车横向半主动悬挂系统模型仿真图,如图7所示。其中,输入为激励xr和磁流变阻尼器的控制力F,输出为机车横向加速度值α。
3 机车横向半主动控制减振器模糊控制策略
机车横向半主动悬挂系统是一个时变、非线性的复杂系统、传统的控制策略在提高其振动性能的品质较差。磁流变阻尼器也是一个非线性系统,线性最优控制方法,开关控制方法在实际运用中,不能很好的实时控制,也不能充分体现磁流变阻尼器的响应快、可逆可调的优点。在阅读参考文献[11-16] 中发现,模糊控制特别适用于参数时变、非线性、强耦合且很难建立精确数学模型的系统控制。
模糊控制的基本思想是把普通集合中的绝对隶属关系灵活化,并利用人类的专家经验来归纳控制规则作为控制策略,从而弥补高速机车动态特性中非线性和不确定因素带来的影响。
由于机车车体横向速度v和加速度α能较好地反映机车振动特性,因此机车横向半主动控制减振器模糊控制策略的基本原理就是以机车车体的横向速度v和加速度α为模糊控制的二个输入,通过实施模糊控制策略,调节磁流变阻尼器的输入电流I,从而达到实时调节抑制机车横向振动的目的。
模糊控制器中横向速度v和加速度α论域的确定是通过取被动控制的仿真结果中v和α的最大值为其论域范围。其论域分别为:v=[-0.85,0.85] m/s,α=[-0.3,0.3] m/s2。磁流变阻尼器的工作电流的基本论域为I=[0,2] A。控制规则中,车体横向速度v和加速度α所对应的语言变量均表示成为7个模糊子集[NB,NM,NS,ZE,PS,PM,PB] 以反映速度和加速度的大小。磁流变阻尼器的工作电流I所对应的语言变量表示成9 个模糊子集[ZE,PA,PB,PC,PD,PE,PF,PG,PH] 来表示控制电流的大小。

图7 模糊控制器输入量和输出量的关系曲面Fig.7 Relationship surface of the inputs and output of the fuzzy controller
模糊控制器中输入和输出的隶属度函数均采用高斯型,且它们的量化因子kv,kα和比例因子kI均为1。建立模糊控制规则的标准是以减小机车车体横向振动加速度最小为目的。模糊控制规则表如表1所示。模糊控制器二输入和输出的关系曲面由图7所示。

表1 一般模糊控制规则表Tab.1 The rule table of general fuzzy control
4 自适应模糊控制器的设计
4.1 量化因子和比例因子对系统性能的影响
kv,kα是机车横向速度的量化因子,kv,kα越大,系统的调节惰性越小,上升速率越快,产生的超调越大,使系统调节的时间变长,严重时还会产生震荡乃至系统不稳定。反之,kv,kα过小,会使系统的上升速率过小,使系统的稳态性能下降。kI是磁流变阻尼器电流I的比例因子,kI增大相当于系统总的放大倍数增大,使系统响应速度加快。kI过大,会使系统输出上升速度过大,从而产生过大超调乃至发散;反之,kI过小,使系统的输出上升速度小,快速性变差,稳态精度变差[17]。
由上述可以得知量化因子kv,kα和比例因子kI的自适应模糊控制调节规律性可以描述为:当车体的横向速度v和加速度 α较大时,缩小kv,kα,增大kI;当车体的横向速度v和加速度α较小时,增大kv,kα,缩小kI,以改变系统的稳态性能。在本文中,kv,kα,kI的变化调节系数的设置如下:

4.2 自适应模糊控制器
自适应模糊控制器中的二输入及其论域、隶属度函数与一般模糊控制器中相同。其输出是量化因子和比例因子的调节系数 u,其论域设为 u=[0.5,2] ,隶属度函数为三角函数。u对应的语言变量U划分为7个模糊子集{UG,UF,UE,UD,UC,UB,UA}。其量化因子、比例因子参数自适应调节控制规则表如表2所示。自适应模糊控制器二输入和输出u的关系曲面如图8所示。
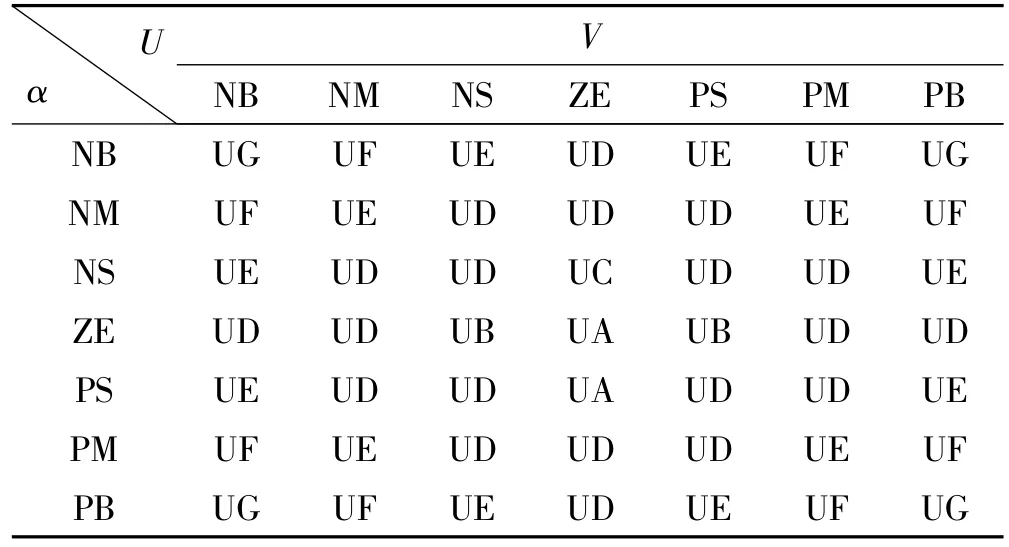
表2 参数自适应模糊控制规则表Tab.2 The rule table of parameter adaptive fuzzy control

图8 参数自适应模糊控制器输入量和输出量的关系曲面Fig.8 Relationship surface of the inputs and output of parameter adaptive fuzzy controller
5 仿真分析
为了说明基于量化因子、比例因子的参数自适应模糊控制的可行性,结合上述建立的三自由度机车横向半主动模型,利用MATLAB软件中的SIMULINK模块建立三自度机车横向半主动数学模型和一般模糊控制器、参数自适应模糊控制器。控制系统仿真结构如图9所示。进行仿真分析时,轨道不平顺激励采用正弦激励,激励振幅为3 mm,频率为πHz。仿真结果如图10所示。为了研究机车横向加速度与激励频率的关系,本文对本模型系统进行0.1 Hz~16 Hz的扫频,得到结果如图11所示。

图9 参数自适应模糊控制系统仿真结构图Fig.9 Simulation chat of the parameter adaptive fuzzy control system


由图10仿真结果可以看出,一般模糊控制的控制效果优于被动控制,参数自适应模糊控制的控制品质又优于一般模糊控制。通过对被动控制、一般模糊控制、参数自适应模糊控制仿真得到的车体横向加速度进行均方根运算,可以得到被动控制横向加速度均方根s1=0.166 7,一般模糊控制横向加速度均方根s2=0.134 6,参数自适应模糊控制横向加速度均方根s3=0.088 3。因此,采用参数自适应模糊控制半主动系统能明显降低高速机车横向加速度,优于被动控制效果47.03%。
根GB5599-85[19],客车运行平稳性指标计算公式,其中W为平稳定性指标,A为振动加速度(g),f为振动频率(Hz),F(f)为频率修正系数。由于本文采用振动频率为f=πHz,频率修正系数F(f)=1。通过计算得到被动控制和二种半主动控制策略平稳性指标 W 值,W被动控制=0.278 8,W一般模糊控制=0.256 5,W参数自适应模糊控制=0.136 7。从结果可以看出,参数自适应模糊控制策略明显优于被动控制和一般模糊控制策略,在减小高速机车横向振动、提高乘客舒适性方面效果最佳。
由图11扫频结果可以得知,在低频阶段0.1 Hz~9.5 Hz之间,一般模糊控制优于被动控制,参数自适应模糊控制效果最好,且在频率4.5 Hz~8 Hz之间机车的横向振动品质最佳。由于人体对横向振动加速度最敏感,且人体的舒适度在4 Hz~8 Hz之间的疲劳时间最长[18],由于在10 Hz~14 Hz之间,参数自适应模糊控制策略满足GB5599-85中规定的客车运行平稳性等级1,因此此方法能明显提高乘客乘坐舒适性。
6 结论
本文通过建立基于磁流变阻尼器的三自由度机车横向半主动模型,并利用SIMULINK进行被动控制,一般模糊控制和参数自适应模糊控制对磁流变阻尼器输出的阻尼力进行控制仿真。仿真结果表明,参数自适应模糊控制能实时、连续、有效地抑制机车的横向振动。根据GB5599-85计算所得平稳性指标,参数自适应模糊控制策略在抑制横向振动方面,优于被动控制50.97%,优于一般模糊控制46.7%。通过机车半主动横向系统对激励频率进行扫频后发现,在低频率阶段0 Hz~10 Hz之间,较被动控制和一般模糊控制,参数自适应模糊控制的抑制机车横向振动效果最好,且在4.5 Hz~8 Hz之间机车的横向振动品质最佳。因此参数自适应控制策略能明显提高乘客舒适性和机车运行稳定性。但由于采用三自由度横向半主动模型,并不能真实反映高速机车真实的横向振动状况,不能充分体现参数自适应模糊控制适用于非线性、强耦合且很难建立精确数学模型情况的优点,因此通过建立高速机车的实体模型来进行参数自适应控制是今后研究的重点。
[1] 丁问司,曹诗军.基于模糊控制的高速列车半主动减振器研究[J] .液压与气动,2008,12:14-16.
[2] 丁问司,卜继玲,刘友梅.我国高速列车横向半主动悬挂系统控制策略及控制方式[J] .中国铁道科学,2002,23(4):1-6.
[3] 杨建伟.高速车辆横向振动半主动控制系统研究[D] .北京:铁道科学研究院,2006.
[4] 丁问司,刘少军,卜继玲.高速列车横向悬挂控制方式及半主动减振器[J] .中国机械工程,2003,14(12):995-998.
[5] Spencer Jr B F,Dyke SJ,Sain M K,et al.Phenomenological model of a magnetorheological damper[J] .ASCE Journal of Engineering Mechanics,l996,1(4):565 -575.
[6] 刘超群,陈花玲,李海龙.磁流变阻尼器阻尼性能研究[J] .振动、测试与诊断,2004,24(2):135 -138.
[7] 王月明,吴学杰,张卫华.基于统计最优的车辆悬挂半主动控制的研究[J] ,铁道车辆,2002,40(5):16-18.
[8] 邓志党,高 峰,刘献栋,等.磁流变阻尼器力学模型的研究现状[J] .振动与冲击,2006,25(3):121-126.
[9] Jansen L M,Dyke S J.Semi-active control strategies for MR dampers-comparative study[J] .Journal of Engineering Mechanics,2002,8:795 -802.
[10] 高国生,杨绍普.高速机车悬挂系统磁流变阻尼器试验建模与半主动控制[J] .机械工程学报,2004,40(10):87-91.
[11] Joghataie A.Neural networks and fuzzy logic for structural control,structural research series[D] .University of lllinois at Urbana-champaign,1994.
[12] 胡家亮,周 丽,严 刚.基于磁流变阻尼器的结构模糊半主动控制实验研究[J] .振动与冲击,2009,28(3):131-135.
[13] 吴学杰,王月明,张立民,等.高速列车横向悬挂主动、半主动控制技术的研究[J] .铁道学报,2006,28(1):50-54.
[14] 马新娜,杨绍普,邸书灵.基于磁流变阻尼器的高速机车横向半主动振动控制研究[J] .振动与冲击,2009,28(7):126-130.
[15] 杜太行,董志然,顾 凯,等.汽车发动机转速自适应模糊控制方法的研究与仿真[J] .河北工业大学学报,2008,37(2):7-11.
[16] 杨建伟,黄 强.基于模糊控制的高速车辆横向半主动悬挂仿真[J] .系统仿真学报,2006,18(12):3542-3546.
[17] 杜太行,董志然,顾 凯,等.汽车发动机转速自适应模糊控制方法的研究与仿真[J] .河北工业大学学报,2008,37(2):7-11.
[18] 任尊松.车辆系统动力学[M] .北京:中国铁道出版社,2007.
[19] GB 5599-85.铁道车辆动力学性能评定和试验鉴定规范[S] .1986.
