无优先权维修活动及其Petri网建模
2011-09-07曲长征于永利陶凤和
曲长征 于永利 陶凤和
军械工程学院,石家庄,050003
0 引言
装备维修任务由一系列的维修活动组成,维修活动关系研究及建模是装备维修性分析和维修过程规划的基础,也是虚拟维修过程建模的关键环节。当前研究中[1-7],一般以串行、并行、选择等关系描述维修作业(活动)关系,并以此进行分析研究。本文通过对维修活动约束的分析,提出了无优先权活动关系的概念,采用Petri网建立了无优先权活动模型,并进行了应用实例研究。
1 维修过程中的无优先权活动
复杂维修过程可逐层分解为一系列的活动,各层次活动间的主要关系包括串行关系、并行关系和选择关系。此外,维修过程中还存在一种特殊的活动关系:两个部件的拆卸过程中,部件无结构上的约束关系,但由于作业空间的限制,必须串行执行两部件的拆卸;多项目维修过程中,由于作业空间的限制,各项目维修只能串行完成,而项目执行顺序是无关紧要的,并且某个项目执行中断时也可交叉执行其他的维修项目。
这种活动关系与柔性工艺中无优先权工序的概念是相似的。所谓柔性工艺,是指能够适应产品、原材料或制造资源变化而设计或生成的具有多样性和可变性的工艺规程,也可以称之为“半成品工艺”。柔性工艺包含可替代加工方法、可替代设备以及工序的无优先权加工或加工顺序柔性等。无优先权加工(加工顺序柔性)指对于不同制造特征,既可以先加工甲后加工乙,也可以先加工乙后加工甲[8-9]。
参考无优先权工序的概念,笔者采用无优先权活动的概念描述维修过程中的这种活动关系。无优先权维修活动关系是指各个维修活动必须串行执行,而其先后顺序可以改变的一种约束关系。
无优先权活动关系与其他活动关系的异同点如下:
(1)与串行活动的不同点是,串行活动是有严格先后关系的,而无优先权活动是无先后顺序约束的;两者的相同点是同一时刻只能执行一个活动,活动顺序是串行的。
(2)与选择活动的不同是,选择活动是选择其一执行的,而无优先权活动是两活动都执行的。
(3)与并行活动的不同点是,并行活动在资源满足的情况下,可并行执行;无优先权活动在资源无限制的情况下,也不能并行执行。无优先权活动和并行活动都是一种活动间无相互关联的活动。并行活动在资源限制而必须选择其中之一串行执行时,也可以按不同的先后顺序选择不同的活动,从这点上看,无优先权活动只是在并行活动上增加了一定的约束,如维修活动时的装备空间约束或其他资源约束。
定义维修过程中的无优先权活动的作用是:①装备拆卸过程中,如果以串行活动关系代替无优先权活动关系,则指定了活动的先后顺序,不能反映可变的活动先后顺序,以及由此引起的不同部件处于分解状态的时序变化,而这种部件的先后拆卸顺序对部件的修理起始时间及后续拆卸状态是有影响的;②部件维修过程中,无优先权活动执行时,因器材短缺造成的活动中断,可以在资源释放后执行另外的无优先权活动,而这种活动间的交替执行是串行活动关系无法描述的。
2 无优先权活动Petri网建模
应用Petri网的变迁和库所表示维修活动关系时,可用变迁表示一项活动,用变迁的输入库所表示活动的前置条件,用输出库所表示活动的后置条件。活动关系可以通过活动的前置条件和后置条件的融合表示。
2.1 无优先拆卸活动建模
拆卸过程中只需要人员及工具等可重用资源,不需要更换备件,所以可以假定拆卸活动一经开始就不会因资源短缺而中断。两个无优先权拆卸活动关系Petri网模型如图1所示。
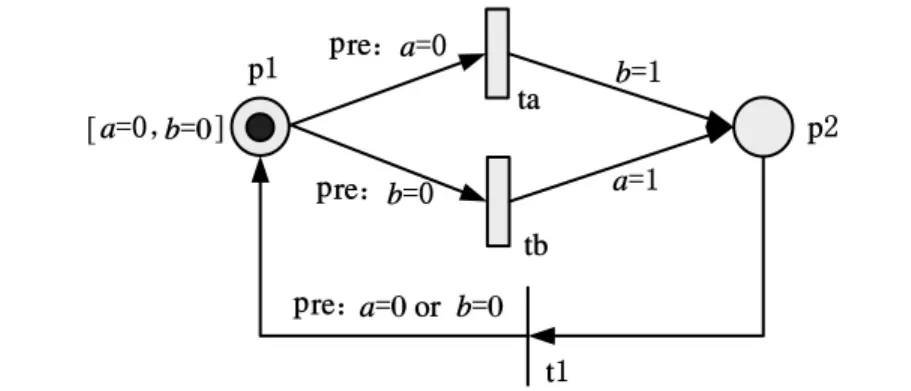
图1 无优先权拆卸活动关系Petri网模型
该网中库所p1、p2中为有色托肯(token),包含有活动的状态信息。p1中的初始托肯的属性为a=0,b=0,这表示任务A、B都未执行。ta、tb为延时变迁(以矩形表示,下同),分别表示任务A、B的执行过程,时间延迟为拆卸活动时间。ta、tb触发使能条件分别为pre:a=0和pre:b=0,即当活动未执行时,其处于可执行状态。初始状态下,任务A、B都处于使能状态,但两者使能相互冲突,不能同时触发,可选择其一触发。ta或tb触发后改变托肯活动状态属性,将其值变为1,即活动执行完毕状态。t1为瞬时变迁(以竖线表示,下同),其使能条件为a=0或b=0,即活动之一未执行。当活动之一未执行时,t1触发,p1中返回托肯继续执行另一活动。
无优先权活动的运行状态可以用Petri网的进程描述。状态与变迁并重,把系统中发生的变化和引起的状态改变如实地记录下来,就是系统的进程。进程如实描述Petri网系统中所发生的一切,它比较直观地反映了系统中变化的顺序和并发关系,描述了系统中“冲突”的消解过程。一个进程只是网系统行为的一次记录,系统所有进程的集合才是网系统动态行为的完整描述。系统可能的进程有两个,如图2所示。进程1为ta、tb串行执行,进程2为tb、ta串行执行,系统的两个进程反映了活动的无优先关系。
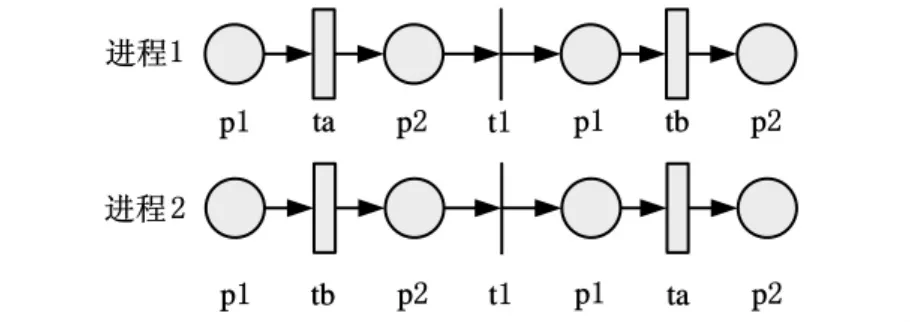
图2 无优先权拆卸活动关系Petri网模型的两个进程
2.2 无优先权维修活动建模
与无优先权拆卸活动不同,无优先权维修任务在维修过程中可能因备件不足而中断,从而改变任务顺序。两部件无优先权维修模型如图3所示。
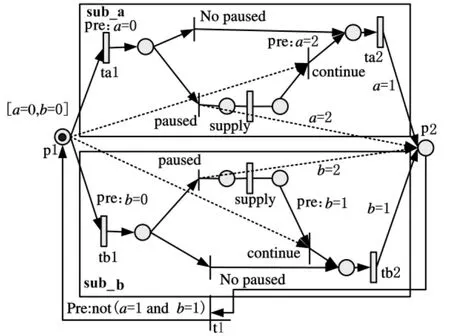
图3 无优先权维修活动模型
模型包括两个结构相同的子网sub_a和sub_b,它们分别表示维修任务A和B的执行状态。每个任务的执行过程分为两部分,以sub_a为例,分为ta1(故障诊断过程)和ta2(故障修复过程)。活动状态包括未执行状态(a=0)、活动执行完毕状态(a=1)和执行中断状态(a=2)。
初始状态下[a=0,b=0],ta1、tb1都处于使能状态(pre[ta1]:a=0,pre[ta2]:b=0)。以ta1先触发为例,维修过程开始后(ta1触发),如果备件短缺(paused),则引发备件获取过程(supply),同时,将任务A的状态设置为2(执行中断状态);如任务需求备件满足,No paused触发,直接完成任务,使活动状态改变为1(活动执行完毕)。其中,No paused触发概率为备件满足率f,paused触发概率为1-f。无论维修任务A是中断还是执行完毕,都满足t1触发条件:not(a=1and b=1),即不是两个活动都执行完毕。t1触发后,使tb1处于使能状态,任务B可以执行,其过程同任务A。中断的任务在备件请领到位后,可通过触发continue变迁重新开始维修。两任务全部执行完毕后,任务状态为(a=1and b=1),t1不再满足触发条件,任务结束。无优先权维修活动模型可能的进程较多,每种进程对应一种可能的运行状态。忽略瞬时变迁,其进程之一如图4所示。
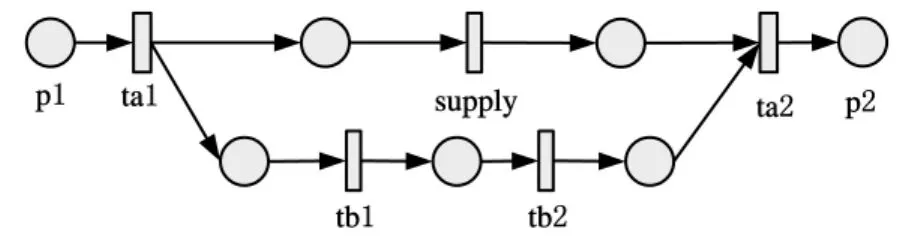
图4 无优先权维修过程的进程之一
3 应用实例
某型火炮在维修过程中需对助退机和复进机进行拆卸和修理。经分析两部件由于空间的限制只能进行串行拆卸,而其拆卸先后顺序是可以改变的,这两个部件的拆卸过程符合本文定义的无优先权拆卸过程。两部件的维修需要在一个工间内完成,而工间的空间只允许进行一个部件的维修,一个部件因备件短缺等因素中断时,可交替进行另一部件维修。建模过程中忽略工间资源,两部件的维修过程构成无优先权维修过程。以Petri网建立了系统模型(图5),模型反映了维修过程活动关系约束及维修人员约束。
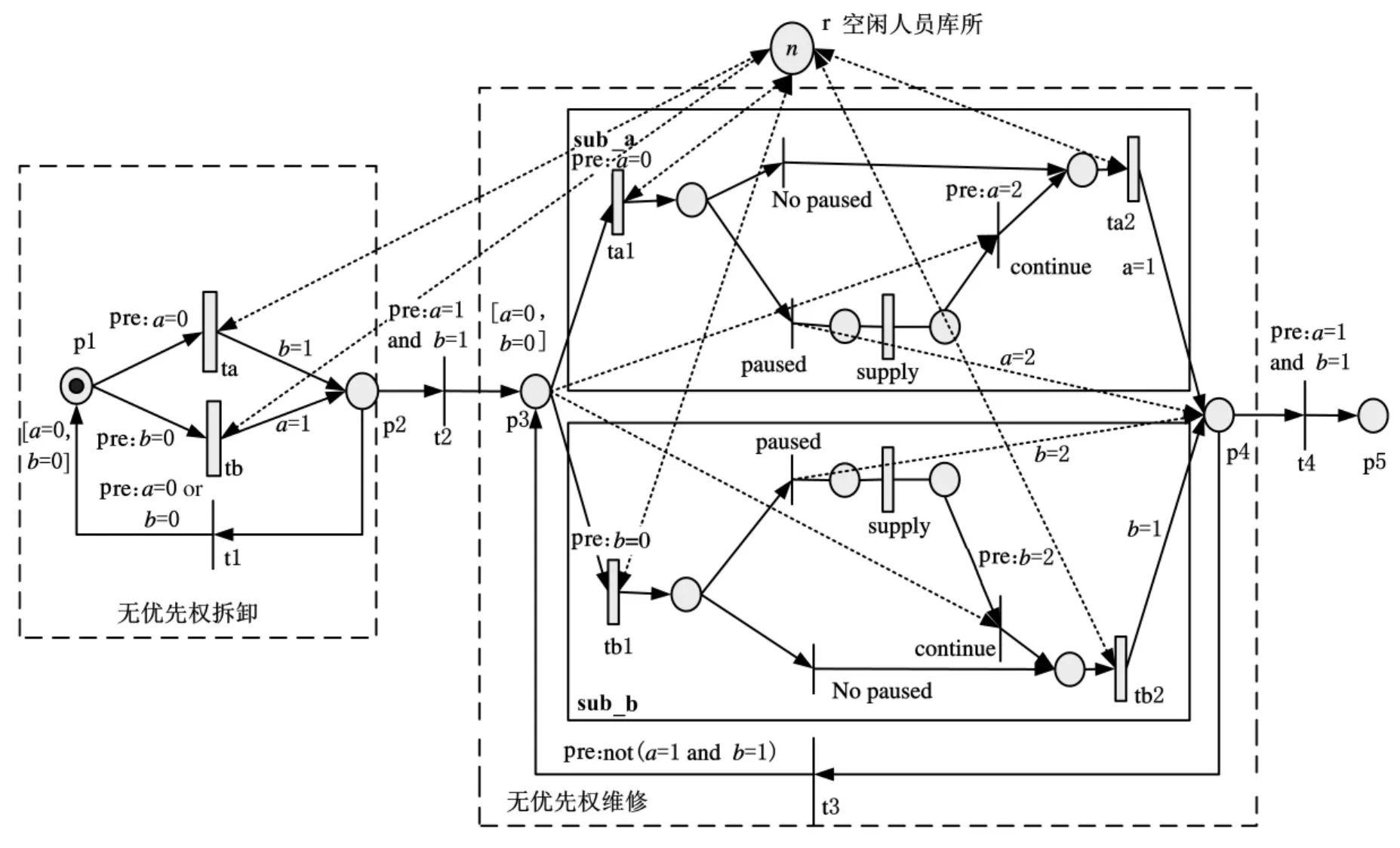
图5 某自行火炮炮塔部分维修模型
模型中,p1库所表示维修初始状态,p5库所表示维修结束状态,库所r表示空闲人员,初始标识n表示参与维修的人员数量。库所r与变迁之间的双向箭头(虚线)是输入弧与输出弧的简略表示方法,输入弧表示对人员的占用,输出弧表示对人员释放,占用和释放人员数量以弧权表示,只有r中空闲人员数量大于等于弧权时,活动才可能具有使能。无优先权拆卸过程中,ta为拆卸复进机,tb为拆卸助退机;无优先权维修过程中,sub_a为复进机维修子网,ta1为复进机拆卸与检测,ta2为复进机修复与装配;sub_b为助退机维修子网,tb1为助退机拆卸与检测,tb2为助退机修复与装配。t2触发使能条件为pre:a=1并且b=1,即两部件拆卸完成后才进行修理。t4触发使能条件为pre:a=1并且b=1,即两部件修理完成后维修结束。模型中其他元素的含义与图1、图3中模型类似,不作赘述。各项维修活动需求的人员数量如表1所示。
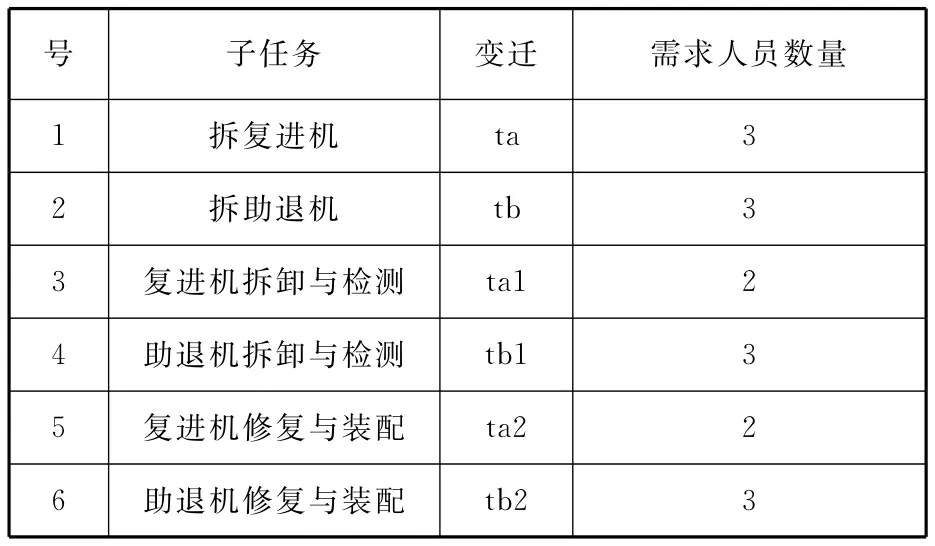
表1 某型火炮维修过程有关数据表
采用Petri网分析软件对模型进行分析,可以直观观察维修活动顺序。在3人参与的维修过程中,拆卸过程进程如图2所示,维修过程进程有6种,忽略瞬时变迁和备件供应变迁,只体现维修活动顺序的进程,如图6所示。
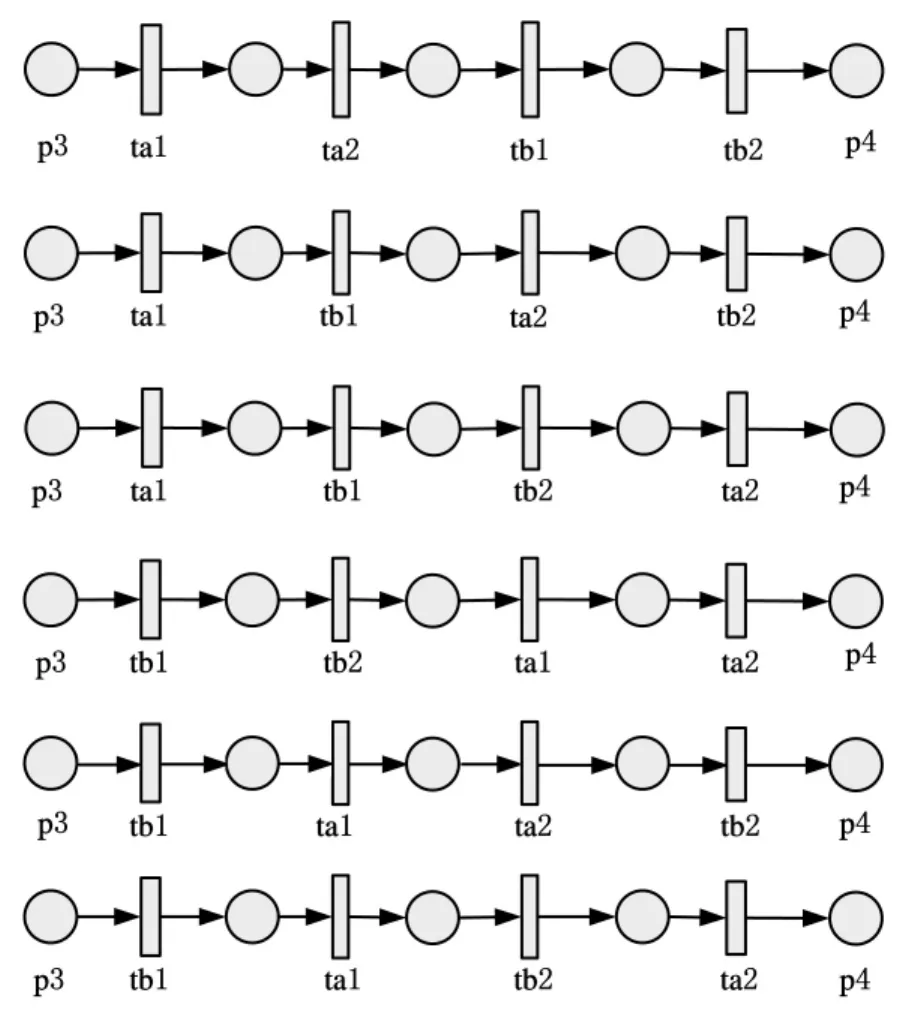
图6 维修活动进程
调整库所r中的初始托肯数量进行仿真,结果显示:当参与人数多于3人时,上述进程不变。
如不采用无优先权活动关系建模,采用串行关系描述时,两部件维修过程需确定先后顺序,某个部件维修过程中断时不会进行其他部件的维修。
采用并行关系描述时,系统进程在人员充足时将会变为并行执行,即人员数量大于等于6时,两部件可进行并行拆卸,人员数量大于等于5时,两部件可并行维修。要反映空间约束,需要增加表示空间资源的库所,其建模方法与模型中的空闲人员库所r类似,库所的初始标识为1。以空间资源描述维修工间的限制是可行的,模型运行结果与无优先权维修建模相同;而以空间资源描述拆卸约束则不是很直观,尤其是在维修资源分析时,人为添加的虚拟资源与要分析的其他资源易混淆。
4 结束语
维修过程中无优先权活动关系的提出丰富了基本维修活动关系的类型。无优先权活动建模揭示了维修过程的深层次约束机理,为考虑资源约束的维修过程分析奠定了基础,仿真实例应用验证了其对维修过程的实际影响。根据维修活动关系的基础性,无优先权活动关系的概念可应用在资源规划、维修性分析等领域。
[1]石全,李建平,刘祥凯.复杂系统抢修时间仿真模型研究[J].计算机仿真,2002,19(1):49-51.
[2]张柳,于永利.基于GRASP的系统维修时间和维修工时模型[J].中国机械工程,2002,13(13):577-579.
[3]徐宗昌,周健,刘义乐.基于Petri网的时线分析新方法[J].中国机械工程,2006,17(5):464-466.
[4]徐宗昌,朴允华,刘义乐.基于Petri网的维修保障系统建设方案研究[J].系统工程理论与实践,2004(8):23-26.
[5]钟诗胜,汤新民,池善纯.基于着色Petri网的航空发动机总装作业调度研究[J].航空精密制造技术,2006,42(6):52-55.
[6]汤新民.基于Petri网的航空发动机车间维修过程建模及其应用研究[D].哈尔滨:哈尔滨工业大学,2007.
[7]汤新民,钟诗胜.基于离散时间最优控制的航空发动机装配序列规划[J].控制与决策,2008,23(11):1221-1225.
[8]李金良,王志勇.基于Petri网的柔性工艺规划[J].燕山大学学报,2003,27(1):71-74.
[9]杨雨图,张银,王宁生.基于共同进化算法的多工艺路线决策研究[J].机械科学与技术,2005,24(8):991-994.
