具有3层重构能力的可重构数控系统
2011-09-07刘清建王太勇王立文
王 涛 刘清建 王太勇 王立文
1.中国民航大学,天津,300300 2.天津大学天津市先进制造技术与装备重点实验室,天津,300072
0 引言
可重构数控系统是当前开放式数控技术的一个研究热点,与传统数控系统相比,可重构数控系统具有很多优点[1]。当前对数控可重构技术的研究主要集中在以下几个方面:①将现场可编程逻辑器件作为硬件系统的一个功能模块,研究如何对其实时编程以实现对硬件系统的重构设计[2-3];②利用组件技术设计数控系统,使数控软件系统具有一定的可重构性[4],或研究 Windows系统的特点,基于 Windows系统设计可重构的软件模型[5];③为了方便系统功能模块的增减,研究总线技术在可重构数控设计中的应用,利用通用串行总线设计系统模块间的通信[6]。上述研究的不足是:忽略了可重构数控系统的实现需要硬件、软件和模块间通信的协同设计。因此,本文将数控系统的重构分成相关联的3个层次:硬件系统重构、软件系统重构和模块级重构,并通过一个实际数控系统的设计,来阐述3个层次的应用及其相互关系。
1 数控系统软硬件开发平台的构建和可重构设计研究
1.1 可重构数控系统软硬件开发平台的建立
图1所示为数控系统的可重构硬件开发平台,以ARM、DSP和FPGA为硬件平台核心,系统采用主从式双CPU设计。ARM处理器作为主芯片,具有通信管理、网络管理、人机交互、指令译码、故障诊断等功能。DSP具有软件插补、位置控制、误差控制等功能。FPGA用于硬件插补器和外围接口电路的设计。由于FPGA能够通过编程改变其内部的硬件电路时序关系,所以数控系统的插补模块和外围接口电路能够根据整个系统的重构需要进行重新配置,使该硬件平台具有很强的重构能力。存储器主要用于整个系统运行的程序和数据的存储。各种硬件功能模块包括显示控制模块、键盘控制模块、数据采集模块、PLC控制模块等,主要用于实现各种具体应用功能。
笔者设计的可重构数控系统软件平台如图2所示,由如下几个部分组成。
(1)硬件服务模块。该模块的主要功能为:①系统开始运行时,对硬件模块进行初始化;②系统运行过程中,其余软件模块只能通过硬件服务模块对硬件进行操作;③硬件模块进行重构时,用VHDL语言描述的文件通过该模块装载入FPGA模块。
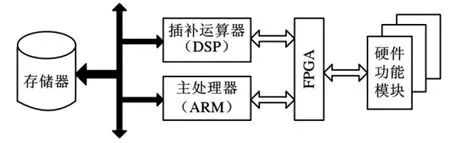
图1 数控系统可重构硬件开发平台
(2)实时操作系统模块。将自行开发的嵌入式实时操作系统TDNC-OS作为系统任务调度与开发平台,该模块的主要功能是处理由内外部事件引发的文件系统或功能任务的调度以及相应设备驱动的激活等。
(3)软件重构配置模块。该模块的功能为:①原有系统参数的重新配置重构;②新功能的加入或新系统的重构生成。
(4)其余软件功能模块。包括文件系统模块、各种插补功能模块、各种交互模块等,主要用于完成系统具体的工作功能[7]。
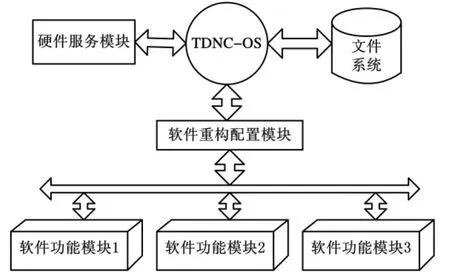
图2 可重构数控系统软件平台结构
1.2 数控系统可重构设计研究
1.2.1 基于FPGA的硬件可重构模块设计
数控系统的可重构性要求数控系统能适时地调整自身的硬件结构以满足重构要求。现场可编程逻辑器件具有硬件电路在线可编程的特性,即它的硬件结构可以像软件程序一样被动态调整或修改[8]。图3为基于FPGA的可重构系统的结构框图,该系统可实现对数控系统从两轴联动到五轴联动的重构设计。由图3可知,可重构模块是ARM模块、DSP模块、交互模块和总线接口模块彼此间通信的桥梁。它不仅为信号传递提供可靠的通路,而且通过装载不同的配置文件,可重构出不同功能的数控系统。驱动模块和外部I/O接口模块(主要用于数控机床电气的控制)通过串行工业现场总线与数控系统相连,减小了模块之间连线的复杂度,提高了通信的可靠性,使整个系统模块的增减更加简便,极大缩短了数控系统模块级的重构时间。
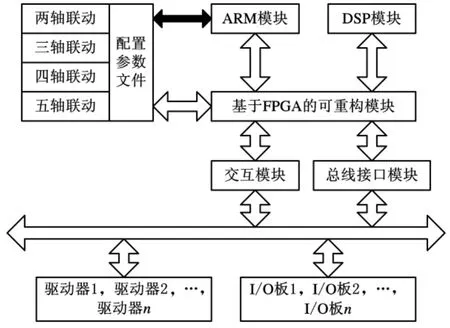
图3 基于FPGA的可重构系统的结构框图
基于常规SRAM编程,本系统基于FPGA的动态配置方案如图4所示。配置参数模块中的数据按照逻辑功能存放,用于配置FPGA内部的各逻辑模块。外部缓冲SRAM在ARM控制下,对系统重建时隙给予自适应的逻辑补偿,保证系统逻辑时序上的连续。系统整体功能采用FPGA硬件复用形式构筑,但系统功能的整合(系统重构、时隙补偿)由ARM规划和控制。
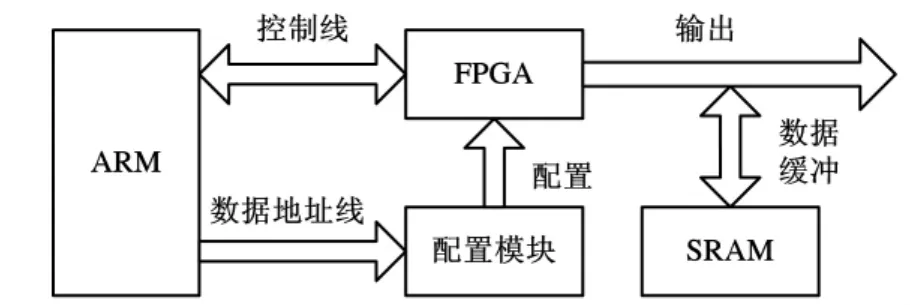
图4 FPGA的动态配置方案
1.2.2 数控系统引导型软件重构开发平台的研究
数控系统的硬件重构和软件重构必须同步进行,才能实现整个系统的重构。根据该数控系统的结构特点,笔者设计了一种具有引导功能的系统重构开发平台,如图5所示。开发平台采用一种引导开发的模式,借助于预先定义的各种信息库,将使用特殊语言描述的用户功能要求转换成信息库中特定策略的组合,然后通过与ARM和DSP相匹配的代码编译器,将策略描述翻译后,再通过下载电缆传送至数控系统。
软件重构开发包括语言描述和引导设置两种开发方式。语言描述方式采用结构化的功能机制,预先定义出系统重构的算法结构,用户只需根据算法的提示加入自己功能要求的描述。图6所示为重构描述语言的结构,图中定义了一种新的插补算法来完成所需的复杂曲线拟合。开发平台提供独立的结构化描述语言,采用面向对象的编程思想,以功能对象群组的方式来描述数控组件对象的特定工作状态。语言描述方案可以通过灵活定义的算法规范深入系统内部的软件构成细节,适用于系统底层策略方案的自定义重构配置。引导设置采用开发向导的形式以图形化询问界面来定制用户的重构需求,一般用于较为简单的重构开发。图7所示为运动拟合精度的重新设定,较为简单,只需修改一些参数,因此,采用引导设置方式进行开发。
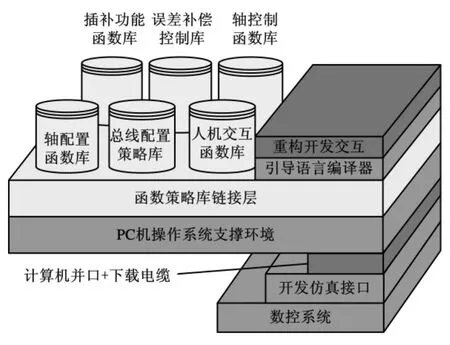
图5 重构开发平台的理论模型
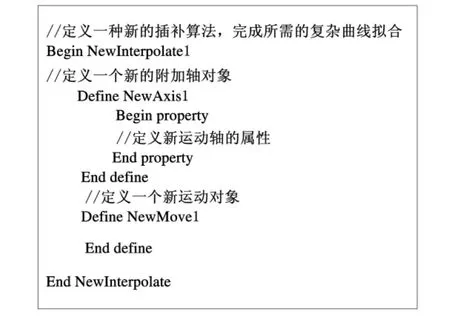
图6 重构描述语言的结构
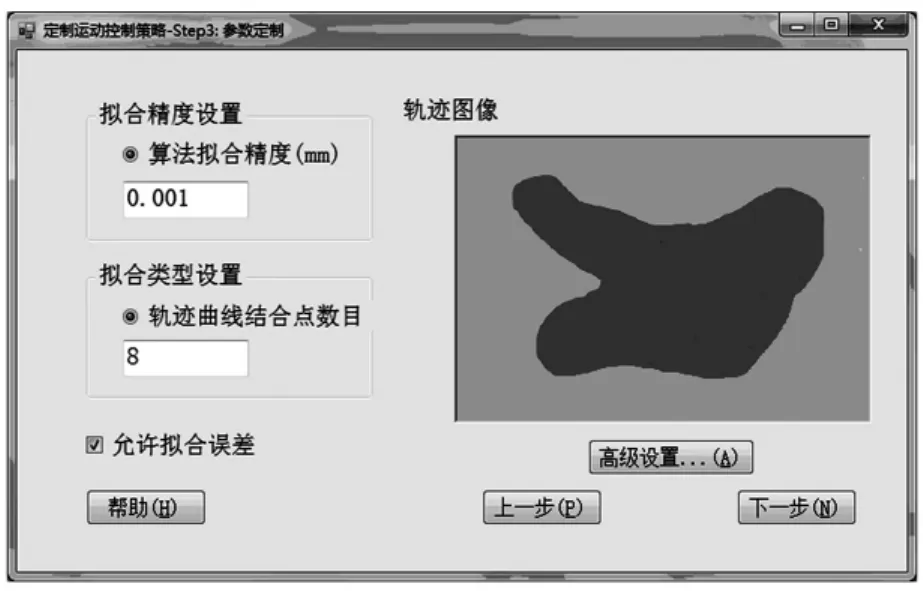
图7 轨迹拟合精度的重新设定
2 基于工业现场总线PROFIBUS-DP的模块可重构数控系统设计
数控系统的模块级重构要求重构过程简便快速,重构后的系统运行安全可靠,在物理空间上能够灵活分布[9]。PROFIBUS-DP是经过优化的高速廉价的通信总线,专用于自动化系统中分散的现场设备之间的通信。特别适合于分布式数字控制系统的高速数据传输。笔者基于前述的可重构软硬件数控平台,将12Mbit/s的PROFIBUSDP作为数控系统模块间的通信总线,成功开发出了TDNCM4数控系统,图8为TDNCM4数控系统分布式模块结构图。在此基础上,下文将研究重构出新的更高性能的五轴联动数控系统TDNCH8的策略方法。
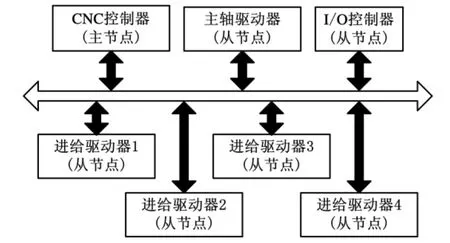
图8 TDNCM4数控系统结构图
图9为将要设计的TDNCH8数控系统的分布式模块结构图,与图8相比最显著的变化就是增加了1个I/O控制器从节点和4个进给驱动从节点,变化的原因是TDNCH8数控系统需具有控制八轴五联动的能力。
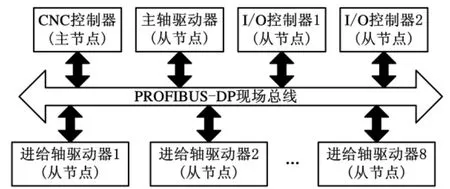
图9 TDNCH8数控系统结构图
表1列出了TDNCM4和TDNCH8数控系统在功能上的相同和不同之处,同时给出了从TDNCM4重构出TDNCH8系统时各种功能所采用的重构方式,“√”表示所在列的重构方式被采用。表1中所列数控功能的重构主要分为3类:
(1)不变。指TDNCM4和TDNCH8共有的功能。如平面直线插补、空间直线插补等功能,在数控系统重构升级的过程中,这部分功能可直接用到新的数控系统中。
(2)增加。指TDNCM4系统有此功能,但由于控制轴数的增加而必须对其进行扩展。如最大进给轴数、坐标系统等功能,需要从四轴增加到八轴。最大进给轴数的扩展是这样实现的:硬件重构增加轴控制通道数,软件重构解决新增轴的位置控制和配置问题,模块重构使新增的进给轴物理载体(一般是伺服电机驱动器和伺服电机)方便地连接到数控系统主控器上。显而易见,为实现控制轴数的重构升级,3种重构方式必须同时采用,缺一不可。坐标系统只需利用软件重构的方式,在前面提到的引导型软件重构平台上,在坐标系统函数库中增加新增四轴的坐标处理函数即可实现,硬件重构和模块重构的方式未用到。
(3)新增。指TDNCM4没有,而TDNCH8新增的功能。主要是一些更高级的插补功能,需要通过软件重构的方式来实现。
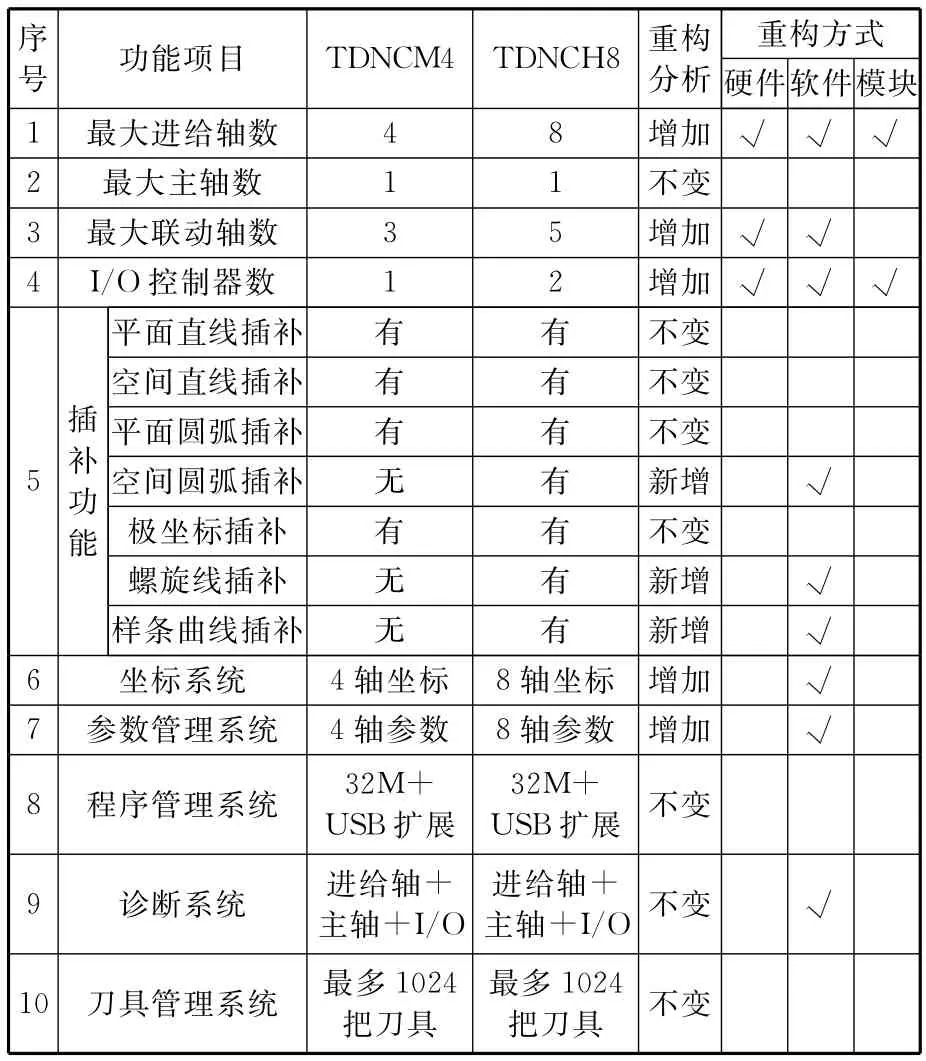
表1 TDNCM4系统和TDNCH8系统主要功能对比
从上述分析中可以看出,基于TDNCM4系统重构出TDNCH8系统必须同时利用数控系统的硬件重构、软件重构和模块级重构技术,三者相辅相成,密不可分。换个角度分析,我们可以把数控系统的重构分为3个层次:①核心功能重构(一般指控制轴数和联动轴数的改变)需要同时采用3种重构方式才能实现;②工作功能(主要指插补功能)重构,只需通过软件重构就能实现;③辅助功能(包括坐标系统、程序管理系统、刀具管理系统等)重构,只需通过软件重构就能实现。只要判断出一个数控系统的重构升级属于哪个层次,就能决定其应该采用的重构方式,例如,如果只是想把刀具管理系统管理的刀具数从1024增加到2048,只需进行软件重构就可以。实际上,这种重构并未改变TDNCM4系统的根本性能,而是扩充或增强了其辅助功能。但如果把TDNCM4系统的控制轴数和联动轴数分别增加到8和5时的数控系统的重构属于核心功能的重构,需3种重构方式同时使用才能实现,而且重构后的系统在根本性能上与TDNCM4系统相比已经有了质的飞跃,新的更高性能的数控系统已经诞生。因此,如果一个可重构的数控系统平台具备上述3个层次的重构能力,那么必将能开发出从低端到高端的系列化数控产品。
在实际应用中,通过对TDNCM4数控系统的软硬件和组成模块的重构设计,成功开发出了五轴联动数控系统TDNCH8,并将其应用在TDNCM80A五轴加工中心上。显然TDNCM4和TDNCH8基于同一种设计结构,属同一个产品系列,只是性能高低不同。同理,采用相同的重构方法,也能方便地重构出车床控制系统、磨床控制系统等,从而形成一个数控系统产品系列。
3 结束语
论文提出从数控系统设计的硬件、软件和模块3个层次来研究可重构数控系统的设计,并给出了各个层次重构的实现方法。研究了3个层次在系统重构中协同应用的问题,并以一个实际设计为例,给出了不同数控功能重构的3种层次的选择方法。课题后续的工作将着重于进一步研究重构过程中的软硬件协同设计问题以及数控系统重构和机床重构的关系问题。
[1]齐继阳,竺长安,王欢.基于USB和组件技术的可重构数控系统的研制[J].制造技术与机床,2007(12):17-20.
[2]Roque A O,Rene de J R,Gilberto H,et al.The Application of Reconfigurable Logic to High Speed CNC Milling Machines Controllers[J].Control Engineering Practices,2008,16(6):674-684.
[3]秦兴,王文,李为建,等.基于FPGA的硬件可重构数控系统的研制[J].仪器仪表学报,2002,23(3):407-409.
[4]齐继阳,竺长安.基于通用串行总线的可重构数控系统的研究[J].计算机集成制造系统—CIMS,2004,10(12):1567-1570.
[5]文立伟,王永章,路华,等.基于开放结构控制器的可重构数控系统[J].计算机集成制造系统—CIMS,2003,9(11):1018-1022.
[6]Wang Yuhan,Hu Jun,Li Ye.Study on a Reconfigurable Model of an Open CNC Kernel[J].Journal of Materials Processing Technology,2003,138(1/3):472-474.
[7]王太勇,王涛,杨洁,等.基于嵌入式技术的数控系统开发设计[J].天津大学学报,2006,39(12):1509-1515.
[8]徐跃,王太勇,赵艳菊,等.基于ARM和DSP的可重构数控系统[J].吉林大学学报(工学版),2008,38(4):848-851.
[9]王太勇,李波,万淑敏,等.基于现场总线的可重构数控系统的研究[J].计算机集成制造系统,2006,12(10):1662-1667.