基于模糊Petri网的数控机床主轴故障诊断*
2012-09-26申桂香王志琼张英芝李全普谷东伟李怀洋
申桂香 王志琼 张英芝 李全普 谷东伟 李怀洋
(①吉林大学机械科学与工程学院,吉林长春 130022;②大连机床集团有限责任公司,辽宁大连 116620)
主轴是数控机床的关键功能部件,其故障将导致数控机床的故障,甚至停机[1]。因此,研究主轴的可靠性是十分必要的。以往对于主轴的可靠性研究,多采用故障树分析、FMECA分析,可靠性评价等[2]。有时主轴的可靠性很高,但其可用性却很低,造成这种现象的主要原因是主轴结构复杂,出现故障后需要花很多时间进行故障诊断,查找导致故障的根本原因。模糊Petri网通过模糊推理规则,有效地解决了这一难题[3-4]。
Petri网是1962年由德国Bonn大学Petri.C.A提出的,是一种能够系统地描述数学和图形的分析工具,具有可达性、安全性、可逆性、有界性等性质[5]。相对于故障树,Petri网更能动态地描述各种故障状态之间的因果关系[6]。模糊Petri网在Petri网的基础上增加了模糊推理规则[7]。近年来,模糊Petri网在可靠性方面应用较为广泛,在汽车、航天、船舶等领域都有所研究[8-10]。但是基于模糊Petri网的故障诊断仅考虑变迁的可信度,还是会显得较为片面[11-12]。本文综合考虑变迁的可信度和激发频率,提出了改进的模糊Petri网的故障诊断方法。结合此思想,运用改进的模糊Petri网对数控机床主轴进行故障诊断,既考虑了导致主轴故障的可信程度,又考虑了导致主轴故障的频率,相对于其他方法,可更加快速,精确地进行故障诊断,减少维修时间,提高主轴的可用性,对于数控机床整机可用性的提高有很大的帮助。
1 模糊Petri网的定义
定义模糊Petri网为一十元组:

其中各字母的含义如下:P为库所有限集合,P={p1,p2,…,pm}(m >0);T 为变迁有限集合,T={t1,t2,…,tn}(n>0);D 为命题有限集合,D={d1,d2,…,dm};I为P→T的输入函数;O为T→P的输出函数;β为库所与命题之间的映射,即 β(pi)=di,pi∈P,di∈D,表示命题pi的真实程度为di;μ为变迁的可信度函数,即μ(ti)=μi,μi∈[0,1],表示变迁 ti的可信度为 μi;α 为库所的可信度函数,即 α(pi)= αi,αi∈[0,1],表示库所pi的可信度为αi;γ为变迁的频率函数,即γ(ti)=γi,γi∈[0,1],表示变迁 ti激发的频率为 γi;f为变迁逆向激发值函数,f(ti)=μi× γi,f(ti)∈[0,1]。
在FPN模型中,用“○”表示库所,“▎”表示变迁,库所与变迁之间用有向弧“→”连接,“○”中的“·”代表库所pi的一种状态,称为托肯(Token)。托肯在模糊Petri网中的移动直观地表示了系统的动态过程。常见的FPN模型主要有以下3种形式,如图1所示。若库所为起始库所,则pi的可信度为 μ(ti)= μ′i,μi是由用户给予的β(pi)=di的命题的真实程度;若库所为中间库所或最终库所,则可信度的计算如图1所示。

2 故障诊断FPN的模糊推理规则
2.1 库所的模糊性
在故障诊断FPN中,库所表示故障的行为和状态。库所分为以下三类:
(1)只有T→P,没有P→T的库所称为故障现象库所,对应的命题表示故障发生的现象;
(2)既有T→P,又有P→T的库所称为故障部位库所,对应的命题表示故障发生的部位;
(3)只有P→T,没有T→P的库所称为故障原因库所,对应的命题表示故障发生的根本原因。故障原因对应命题的真实程度叫做库所的可信度,具有一定的模糊性,根据专家经验取值。
2.2 变迁的模糊性
变迁表示输入库所与输出库所对应命题之间的关系,在故障诊断中,代表前一故障导致下一故障的过程。变迁的可信度表示前一故障能够导致下一故障的程度。模糊Petri网模型的3种形式如图1所示。若已知故障原因或故障部位的可信度,根据Petri网模型的形式,以及变迁的可信度,就可运用3种基本形式对应的公式求得故障部位库所或故障现象库所的可信度。变迁的激发频率在故障诊断中代表零部件发生故障的频率,具有不确定性,根据观测样本的统计特性和专家经验决定故障发生的频繁性。
2.3 逆向激发冲突的消除
传统FPN中,max(μ)所在的库所优先诊断。根据实际经验,max(γ)所在的库所应该优先诊断。由此产生冲突,max(μ)所在的库所对应的γ小,而max(γ)所在的库所对应的μ小,难以确定优先顺序。本文引入逆向激发值的定义,取max(f)对应的库所优先诊断,消除了逆向激发的冲突。
2.4 故障诊断的模糊推理策略
故障诊断的模糊推理过程主要分为逆向推理和正向激发两部分。
(1)逆向推理
列出各个库所的可达性集合和立即可达性集合[14],库所pi可达性集合为库所pi经过一系列变迁所得到的库所的集合,库所pi的立即可达性集合为库所pi只经过一次变迁所达到的库所的集合。将故障现象库所pi作为目标,以故障现象库所pi为立即可达集的所有库所中,优先诊断最大逆向激发值对应的库所,如果该库所为故障原因库所,逆向推理结束。如果该库所为故障部位库所,重新将故障部位库所作为目标继续逆向推理,直到逆向激发得到的库所为故障原因库所。
(2)正向激发
在故障诊断的故障原因库所放置一个托肯(Token),表示该库所对应的命题存在。工作人员检查逆向推理得到的故障原因,判断故障原因的真实程度,给予故障原因库所可信度,然后判断变迁是否可以激发。输入库所表示变迁激发的前提条件,输出库所表示变迁激发导致的结果。给定每个变迁固定的阈值λ。当α(pi)≥λ,变迁激发,托肯转移到变迁激发的输出库所中,如果输出库所为故障现象库所,说明故障原因已经找到;如果输出库所为故障部位库所,继续进行激发,直到故障现象库所。当α(pi)<λ,变迁无法激发,对模糊Petri网其他故障部位和故障原因库所进行逆向推理,重新诊断。
3 基于FPN的数控机床主轴故障诊断实例
本文以文献[15]中主轴故障树数据为依据进行主轴的模糊Petri网的故障诊断。具体的步骤如下:
(1)将文献[15]中的故障树转化为模糊Petri网模型,如图2所示。

(2)以数控机床主轴切削振动大为例。以切削振动大为主轴故障现象的模糊Petri网模型如图3所示。命题所代表的含义如表1。

(3)建立各个库所的可达性集和立即可达性集,如表2所示。
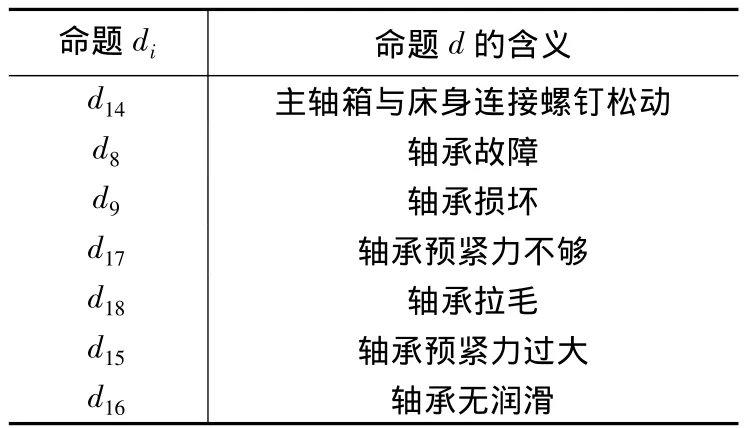
表1 命题di的含义

表2 可达性集和立即可达性集
(4)计算变迁逆向激发值
根据表3模糊取值范围[8]确定变迁的可信度变迁激发的频率,分别为:

根据模糊推理规则,计算求得变迁逆向激发值:

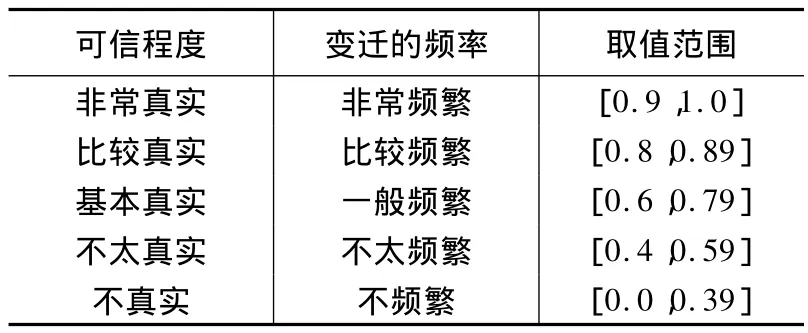
表3 模糊取值范围
(5)逆向推理
根据故障现象主轴切削振动大逆向推理,max(f8,f14)=f8,变迁t8优先逆向激发,输入库所p8为故障部位库所,对应的命题为d8轴承损坏。以库所p8为目标继续逆向推理,max(f8,f17,f18)=f17,变迁 t17优先逆向激发,输入库所p17为故障原因库所,对应的命题为轴承预紧力不够,逆向推理结束。
根据逆向推理,故障现象主轴切削振动大的故障诊断原因顺序依次为:β(p17)=d17,轴承预紧力不够→β(p16)=d16,轴承无润滑→β(p15)=d15,轴承预紧力过大→β(p18)=d18,轴承拉毛→β(p14)=d14,主轴箱与床身连接螺钉松动。
(6)正向激发
逆向推理得到主轴切削振动大的原因为轴承预紧力不够,工作人员检查轴承是否预紧力不够,进行预紧。根据实际情况给予故障原因库所可信度。设定变迁激发的阈值λ=0.73。如果命题“预紧力不够”、“非常真实”,如表3所示,给予库所p17可信度α(17)=0.95>λ,变迁 t17激发,α18=α17×μ17=0.95×0.96=0.912>λ,变迁t8激发,最终达到故障现象库所,即故障原因找到。如果命题“预紧力不够”、“不太真实”,如表3所示,给予库所可信度α(17)=0.48<λ,变迁t17无法激发,说明预紧力不够不是切削振动大的根本原因。再开始检查故障原因轴承无润滑,依次进行故障诊断,直到找到故障原因。
4 结语
本文在传统故障诊断FPN基础上,引入变迁逆向激发值的概念,有助于更加迅速地进行故障诊断,及时排除故障,提高数控机床主轴的可用性。基于改进的模糊Petri网理论对数控机床主轴进行故障诊断的模糊推理,既有定性分析,又有定量分析,计算与图形相结合,逻辑清晰,为今后在计算机上实现打下良好的基础。与此同时,FPN还可以根据实际情况及时进行增减必要的主轴故障原因,以使数控机床主轴的故障信息不断地得到完善。
[1]于捷,贾亚洲.数控车床故障模式影响与致命性分析[J].哈尔滨工业大学学报,2005(12):1725-1727.
[2]蒋仁言,左明健.可靠性模型与应用[M].北京:机械工业出版社,1992.
[3]LAN Jinchuan,MA Min.Fault diagnosis method of power system based on the adaptive fuzzy petri net:IEEE Circuits and System International Conference on Testing and Diagnosis,APR28 -29,2009:75 -78[C].Chengdu:UESTC.
[4]LU Qiuqin,HUANG Guangqiu.Fuzzy analysis of accidents diagnosis based on fuzzy petri net[J].International Journal of Systems and Control,2007,2(3):228 -236.
[5]袁崇义.Petri网原理[M].北京:电子工业出版社,1998:25-35.
[6]YUAN Jie,SHI Haibo,LIU Chang,et al.Backward concurrent reasoning based on fuzzy petri nets[C].2008 IEEE World Congress on Computational Intelligence:Fuzzy Systems(WCCI- FUZZ2008),Hongkong,June 2008:832-837.
[7]BINH PTT,TUYEN ND.Fault diagnosis of power system using Neural Petri Net and fuzzy Neural Petri Net[C].IEEE Power India Conference 2006,ARP 10 -20,2006 New Delhi India.2006 IEEE Power India Conference,2006,1:176 -180.
[8]向永生,刘武,乐晓波,等.基于模糊Petri网的汽车故障诊断仿真研究[J].计算机工程与科学,2009,31(3):86 -88.
[9]DING Caihong.Application of Petri net to fault diagnosis in satellite[J].Journal of Systems Engineering and Electronics,2001,12(2):92 -96.
[10]张海燕,夏飞.基于改进Petri网的船舶电力系统故障诊断[J].船电技术,2010,30(6):35 -38.
[11]XLI F,LARA R.Adaptive fuzzy Petri net for dynamic knowledge representation[J].Expert Systems with Application ,2000,19(3):235-241.
[12]ZHANG Peng,ZHAO Shiwei,WANG Yake.The research of aircraft fault diagnosis based on adaptive FPN[C].2009 Chinese Control and Decision Conference,Northeastern University,China、IEEE Industrial Electronics(IE)Chapter,Singapore、Guilin University of Electronic Technology,China.Proceedings of 2009 Chinese Control and Decision Conference,2009:5252 -5255.
[13]林闯.随机Petri网和系统性能评价[M].北京:清华大学出版社,2000.
[14]丁军,张志华,周学智.模糊Petri网在指火控系统故障诊断中的应用[J].情报指挥控制系统与仿真技术,2005,27(3):48 -52.
[15]张英芝,申桂香,薛玉霞,等.数控车床主轴模糊故障树分析[J].吉林大学学报,2006,36(2):66 -68.