基于BP人工神经网络的工艺创新科技政策评价
2011-09-05时丹丹嵇国平
时丹丹,嵇国平
(1.哈尔滨工程大学,哈尔滨 150001;2.哈尔滨商业大学,哈尔滨 150028;3.南昌工程学院,南昌 330029)
0 引言
科技政策(Science and Technology Policy,STP)源于1963年联合国在日内瓦召开的科学技术会议,此后开始成为一个专业术语,并被发达国家普遍采用。就其本质而言,就是建立有着科学技术的战略、规划、计划、法律、条例、办法等组成的体系。以达到营造创新环境,支撑和引领经济和社会发展的总体目标。工艺创新作为一种重要的创新形式,在各个方面都会受到科技政策的支持和影响。国内外学者把多种方法应用于科技政策的评价,主要有模糊综合评价法、灰色系统评价法、层次分析法、主成分分析法、因子分析法、数据包络法等,但是这些方法确定政策评价的权重时多是采用人工赋值的方法,因而具有评价结果主观性较强的缺点。人工神经网络具有自学习和自适应能力,神经网络在训练时,能从输入、输出的数据中提取出规律性的知识,记忆于网络的权值中,并具有泛化能力,即将这组权值应用于一般情形的能力。从而避免了人工赋值的主观性,使计算结果更加客观。
1 变量设计与数据说明
我们从科技计划管理政策、工艺创新的保护与扶持政策、工艺创新信息化的科技扶持政策、产学研结合政策、知识产权保护政策和绿色节能政策5个方面考察科技政策。科技政策变量及工艺创新状况变量及其他相关变量的设计与说明如表1所示。
选取北京、沈阳、哈尔滨的135家制造业企业为调研对象,采用计算机辅助电话访问(CATI)与邮寄调查问卷相结合的方法,向这些企业的有关管理人员和技术人员发放调查问卷434份,有105家企业对调查问卷进行了回复,回收调查问卷304份,其中有效问卷262份,回收率为77.77%,有效率为86.18%。问卷中所有题项均采用Likert7点量表:1代表非常不同意、2代表不同意、3代表有些不同意、4代表不确定、5代表有些同意、6代表同意、7代表非常同意。
按照调查问卷的结果,将105家企业按照工艺创新状况分为两个小组:“工艺创新状况好”小组和“工艺创新状况差”小组。每家企业的分组依据是Likert7点量表得分:如果某家企业只有一份有效回收的调查问卷,则Likert7点量表得分小于或等于4时,则认为该企业属于“工艺创新状况差”小组,Likert7点量表得分大于4时,则认为该企业属于“工艺创新状况好”小组;如果某家企业有多份有效回收的调查问卷,则各有效调查问卷Likert7点量表得分之和的算术平均值小于或等于4时,则认为该企业属于“工艺创新状况差”小组,Likert7点量表得分之和的算术平均值大于4时,则认为该企业属于“工艺创新状况好”小组。
对于有效的Likert7点量表问卷进行归一化处理,将它们转化为[0,1]上的无量纲化指标属性值,具体处理方法为:


表1 科技政策与工艺创新状况变量表
2 模型设计与计算原理
根据表1对科技政策变量、工艺创新变量与其他相关变量的设计,构建基于BP人工神经网络的工艺创新科技政策评价模型,其网络结构如图1所示。并定义两类错误:第一类错误:将“工艺创新状况好”的企业误判为“工艺创新状况差”的企业。第二类错误:将“工艺创新状况差”的企业误判为“工艺创新状况好”的企业。
根据图1中的网络结构,建立基于BP算法的工艺创新科技政策评价模型:


图1 BP神经网络结构

模型(3)可用向量表示为:


对于训练样本集和测试样本集,利用上述模型进行计算,首先,令隐层结点数m=1,然后逐个增加,经计算,当m=6时,训练样本集和测试样本集的误判率最低。所以,本文构建了一个输入层包括13个结点,隐层包括6个结点,输出层包括1个结点的BP神经网络识别模型。
将训练样本集的科技政策及研发资源、研发能力x1-x13作科技政策BP神经网络评价模型的输入层,利用MATLAB7.2神经网络工具箱进行仿真计算。假设预先设定误差精度e=0.01,学习率η=2,利用图1的神经网络结构进行计算。对BP人工神经网络分别训练200次和600次。设k为网络训练次数,k分别取200和500。当网络训练k次时,设样本输出值为y(k),原目标值为t,用e(k)max表示样本输出值与原目标之间的最大误差绝对值,即

将k次训练的最大总误差可定义为:
隐层结点的传递函数及网络输出函数f(h)均采用Logistic函数:

其中,e(k)traing表示对训练样本训练k次时,“工艺创新状况好”的小组输出值与原目标值是最大误差的绝对值;e(k)testg表示对测试样本训练k次时,“工艺创新状况好”的小组输出值与原目标值是最大误差的绝对值;e(k)trainb表示对训练样本训练k次时,“工艺创新状况差”的小组输出值与原目标值是最大误差的绝对值;e(k)testb表示对测试样本训练k次时,“工艺创新状况差”的小组输出值与原目标值是最大误差的绝对值。
3 计算结果与结论
在105个样本企业中选择70个样本企业作为训练集,剩下的35个样本企业构成测试集,计算的均方误差与学习率如图2、图3所示。
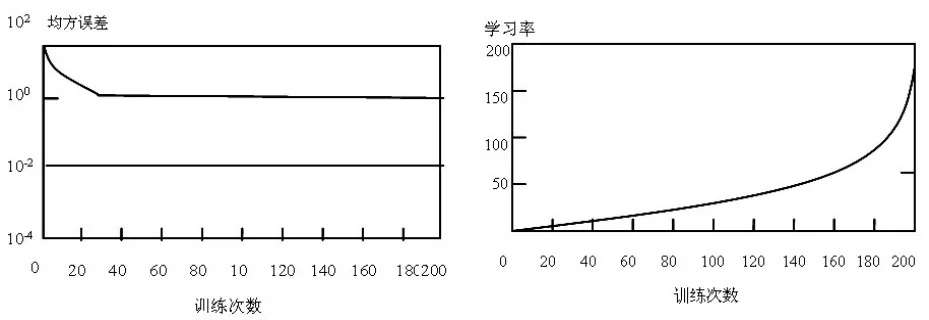
图2 训练200次时均方误差与学习率

图3 训练600次时均方误差与学习率

表2 训练集及测试集的最大误差值表
从表2的计算结果可以看出,当网络训练200次时,最大总误差为0.0307,未能满足预先设定的e=0.01的要求;当网络训练600次时,最大总误差为0.0005,小于预先设定的e=0.01。
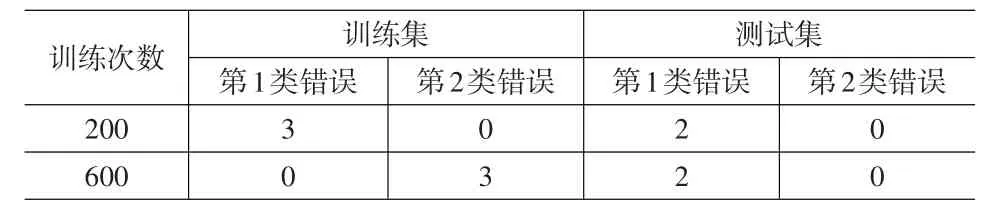
表3 训练结果的误差状况表
根据表3中的数据,通过计算可以看出,对训练样本来说,当训练200次时,第一类错误个数为3,第二类错误的个数为0,分类的准确率为95.71%,当训练600次时,第一类错误个数为0,第二类错误个数为3,分类的准确率也为95.71%;,对测试样本来说,当训练200次和600次时,第一类错误个数都为2,分类的准确率为94.29%。总之,无论训练200次,还是600次,训练集分类的准确率都是95.71%,而测试集分类的准确率为94.29%,总的分类准确率是95.24%。
4 结论
本文利用BP人工神经网络来解决工艺创新科技政策的评价与分类问题,通过计算,当网络训练600次时,网络最大总误差值为0.0005,远远小于误差指标预先设定值0.01,满足误差的精度要求。因此,当神经网络训练600次时,BP人工神经网络达到一定稳定状态,目标函数达到最优,评价的总体准确率在远远小于预先给定的精度0.01的条件下达到95.24%。BP人工神经网络工艺创新科技政策评价模型的准确率较高。
[1]傅加骥,仝允桓,雷家马肃.技术创新学[M].北京:清华大学出版社,2000.
[2]约瑟夫·熊彼特.经济发展理论[M].北京:商务印书馆,1990.
[3]经济合作与发展组织.技术创新调查手册[M].北京:新华出版社,1997.
[4]毕克新,丁晓辉,冯英浚.制造业中小企业工艺创新及测试评价现状和发展趋势研究综述[J].科技管理,2002,(6).
[5]毕克新,王晓红,孙金花.WTO框架下中小企业技术创新支持体系研究[M].北京:机械工业出版社,2006.
[6]庞素琳,王燕鸣,黎荣舟.基于BP算法的信用风险评价模型研究[J].数学的实践与认识,2003,33,(8).
[7]WEST D.Neural Network Credit Scoring Models[J].Computers&Operations Research,2000,(27).
[8]Tushman M,L.Rosenkopf.Organizational Determinants of Technological Change:toward a Sociology of Technological Evolution[J].Research in Organizational Behavior,1992,(14).
[9]OECD/Euro stat,Oslo Manual:Guidelines:For Collecting and Interpreting Technological Innovation Data[M].OECD/Euros tat,2005.
