基本星座下北斗卫星导航系统服务性能分析*
2011-08-29张国柱雍少为
翟 桅,张国柱,雍少为
(国防科技大学电子科学与工程学院 卫星导航研发中心,湖南 长沙410073)
0 引 言
北斗卫星导航系统 (COMPASS)是我国正在实施的自主研发、独立运行的全球卫星导航系统。COMPASS卫星导航系统致力于向全球用户提供高质量的定位、导航和授时服务,该系统由空间端、地面端和用户端三部分组成。空间端包括5颗静止轨道卫星和30颗非静止轨道卫星。我国此前已成功发射四颗COMPASS导航试验卫星和七颗COMPASS导航卫星,将在系统组网和试验基础上,逐步扩展为全球卫星导航系统。
COMPASS导航系统基本星座包含3颗地球同步轨道卫星(GEO),3颗倾斜地球同步轨道卫星(IGSO)。
将对基于COMPASS系统基本星座的六颗星,对于全球及重点区域(中国及亚太地区)的导航服务性能做出仿真分析。
1 评定GNSS服务性能的标准
评定GNSS服务性能的常见标准有:可见性、覆盖性、星座几何构型、精度因子(DOP)、导航系统精度(NSP)、完好性、服务可用性、连续性等,其中可见性和几何精度因子是评定全球导航卫星服务性能的重要标准之一[1]。
可见性指的是可观测到的卫星个数,表现了系统在特定的区域和时间内为用户提供导航服务的能力,主要通过可观测到卫星的个数及其几何分布来评定[2]。
系统的精度有两个分量:伪距观测精度和几何精度因子。GDOP值是描述空间位置误差和时间误差综合影响的几何精度因子,它可将观测的伪距观测误差转换成用户的位置误差。在实践中根据不同的要求,可采用不同的精度评价和相应的精度因子,除了GDOP值以外还有:平面位置精度因子(HDOP),高程精度因子(VDOP),空间位置精度因子(PDOP),接收机钟差精度因子(TDOP),这些DOP值都是评定GNSS服务性能的重要尺度,DOP值越小,定位授时精度越高[3]。
着重讨论卫星导航系统的可见性,和几何精度因子的计算方法。
1.1 可见性计算
可见性是与站心坐标系直接相关的,站心坐标系有两种:站心直角坐标系(ENU)和站心极坐标系。站心直角坐标系存在着与地心地固空间直角坐标系(ECEF)的直接转换关系,设ECEF坐标系到ENU坐标系转换矩阵为T,则
设 (XH,YH,ZH)为卫星的 ENU 坐标,已知(X0,Y0,Z0)为地面点的 ECEF坐标,地面点大地纬度为 L,大地经度为 λ,(X,Y,Z)为卫星的ECEF坐标,则有如下等式成立。
用(RH,AH,EH)表示卫星在站心极坐标系下坐标,RH为卫星至测站距离,AH为卫星方位角,EH为卫星在地平面上高度角,可由 (XH,YH,ZH)求得
EH取值范围为-90°~90°,当0°<EH≤90°时,说明卫星相对于地面点是可见的,如果考虑到遮蔽效应,例如取遮蔽角为10°,则可见卫星的高度角取值范围为10°<EH≤90°[4].
1.2 几何经度因子计算
1.2.1 观测矩阵计算
用户定位解算的线性化观测方程可写为

式中,x为4×1矢量,其元素分别为接收机X、Y、Z坐标和时钟钟差的真值相对于线性化点x0= (Xu0,Yu0,Zu0,ctu0)的偏移量,由x0(已知)和x可唯一描述接收机位置和钟差的真值[5],为便于描述以下将x作为真值的代表,H为系数矩阵为卫星m(m=1,…,n)的位置,Ri为卫星m到线性化点x0所代表用户位置的距离,y为n×1矢量,其元素是测量伪距与在线性化点预测伪距间的差值,n是可视卫星数,ε为n×1维测量噪声矢量。
1.2.2 各类DOP值计算
由观测矩阵H和ECEF坐标系到ENU坐标系转换矩阵T,可计算得到用户某历元的所有DOP值[6]


其中[]′为矩阵转置,[]ij为矩阵的第i行第j列元素,A1:3,1:3为矩阵A 的去掉第4行第4列组成的新3×3矩阵。
1.2.3各类DOP的最大值、最小值与平均值统计
2 COMPASS系统服务性能分析
卫星导航系统仿真是系统建设的重要步骤,COMPASS系统同样需要建立自己的仿真、验证系统,导航系统服务性能分析是仿真验证的关键指标之一。自主开发了导航系统服务性能分析软件,在软件设计上采用了兼容开放的体系结构设计方法,兼容COMPASS、GPS等多种导航系统。目前软件只用于分析COMPASS和GPS两种系统的全球服务性能,同时预留了可扩展接口,可以适应未来的多系统兼容互操作。同时,自研软件仿真结果与STK软件进行了比对,保证了软件分析的正确性。
软件在处理流程上采用了多线程处理方法,在不同的处理线程中完成文件操作、数据处理、界面显示。
主要利用了北美防空联合司令部发布的两行式实时轨道数据(NORAD Two-Line Element Sets Current Data)2011年1月3日提供的 COMPASS在轨运行卫星轨道参数进行仿真。其中有4颗GEO分别为 G1、G2(失效)、G3、G4,2颗IGSO分别为IGSO1、IGSO2,同时IGSO3的轨道参数参照IGSO1和IGSO2,真近点角与两者均相差120°.利用STK软件仿真得到了COMPASS基本星座六颗星在2011年1月3日2维显示图,如图1所示,其中3颗IGSO星下点轨迹以“8”字型运动,轨道倾角55°,3颗GEO星分布在东经80°到东经160°范围内。
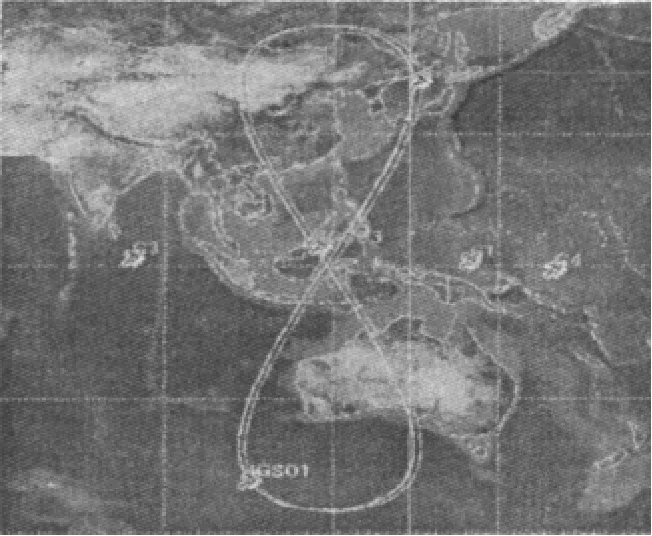
图1 COMPASS星座卫星轨迹图
利用STK生成的COMPASS基本星座六颗星的轨道参数,设计仿真分析软件对COMPASS系统服务性能进行仿真分析。在仿真分析中取遮蔽角为5°,时间取2011年1月4日0点到2011年1月5日0点。步长为5min,全天取288个时间点。
2.1地球表面网格的划分
卫星导航系统全球服务性能分析采用网格法,在每一格点,取一定观测时段按一定采样间隔分别确定是否可用,然后对所有地面网格点的所有采样时刻的服务性能结果进行统计,得到系统服务性能。
为了对全球的导航系统服务性能进行统计评估,若按照一定的规则将地球表面进行网状分割,网上的每个节点称为网格点,对应于地面的相应位置。网格的划分通常可采用两种方法:等经纬度划分法和等面积划分法。本文采用等经纬度划分法,将全球表面按照纬度线和经度线分别划分为m和n等份,即每一网格的纬度宽度Δφ和经度宽度Δλ分别为

得到网格点G(i,j),i=0,1,…,n;j=0,1,…,m,则第k(k=1,2,…m×n)个网格区域的面积Areak为

式中:R为地球半径;φ为网格区域几何中心点所在的纬度。上式显示,每个网格区域的面积不等,且与网格区域所在的纬度带有关。
在每个网格区域取其几何中心位置作为代表点,代表点的服务性能即为整个网格区域的系统服务性能。
实验采用COMPASS星座,网格分辨率为5°,全球共划分2592个网格。
2.2 COMPASS全球可见性分析
COMPASS系统现阶段在亚太地区已基本具备提供定位服务能力,下面设计软件具体分析当前COMPASS系统的全球可见性。图2是该系统全球可见性分析处理流程。
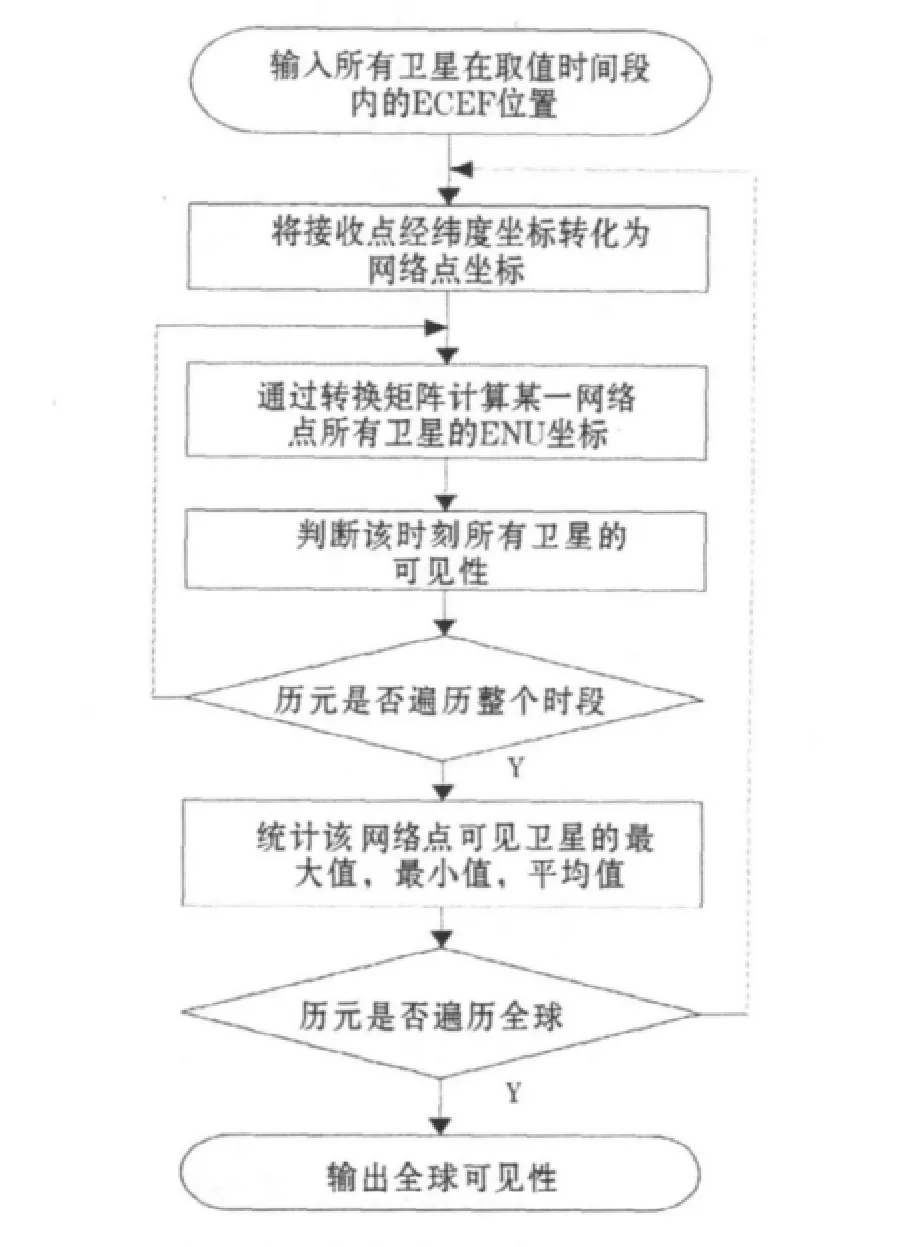
图2 全球可见性数值分析处理流程
在设计软件计算并显示全球可见性与DOP值过程遇到了数据量大,计算复杂度高,导致计算量呈几何级数增长的问题:在实践中通过合理设计处理流程和精简数据结构来规避大数据量的反复操作。
1)尽量使用维数少的数组,大量矩阵运算时多采用指针。
2)严格控制变量的作用域,在作用域外即时释放变量空间。
3)避免大数据量的反复操作,精简处理流程。
依据图2所示流程与先前通过STK软件仿真得到的卫星数据,设计全球服务性能显示界面,计算并显示得到COMPASS全球服务性能图(见图3)。
由图3可以看到,COMPASS系统现阶段在亚太地区已基本实现平均可见4颗星以上,局部地区(例如南海地区,南亚地区)平均可见6颗星,达到了导航最低可见4颗星的要求,在中国大部分区域平均可见5颗星,如单独利用COMPASS系统定位,也可实现定位解算。就平均可见卫星数而言,在中国地区,南部好于北部,东部好于西部,对于除亚洲大洋洲以外的其他地区,基本不能实现定位。
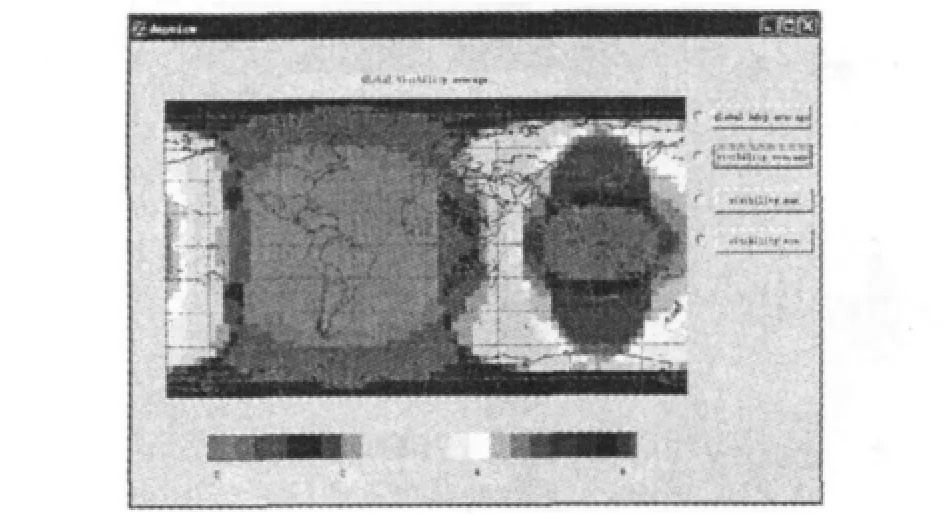
图3 COMPASS全球平均可见性图
2.3 COMPASS全球DOP值分析
通过可见性分析可以看到,当前COMPASS系统在重点区域已具备提供服务的能力,下面具体量化分析该系统在全球及重点区域的定位性能,第二章已提到定位精度主要通过DOP值来反映,本节首先列出系统全球DOP值分析处理流程。
依据图4流程与先前通过STK软件仿真得到的卫星数据,以及全球服务性能显示界面,计算并显示得到COMPASS全球DOP图。
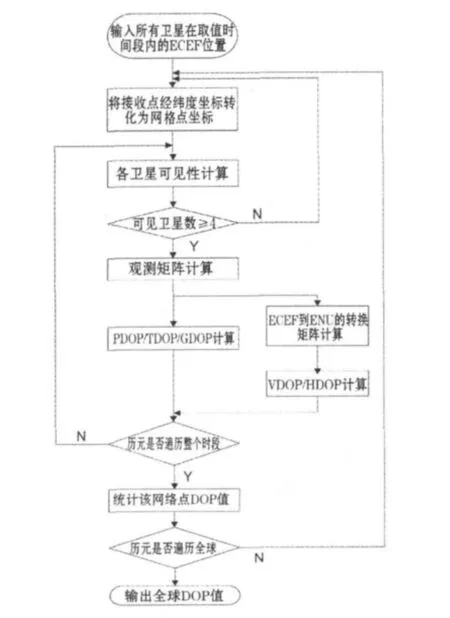
图4 全球DOP值分析处理流程
以GDOP为例进行分析,由于可用卫星数较少,为了显示的直观与方便,将无法计算的点和GDOP≥15的点统一设定GDOP=15,并认为这些点都是无法进行定位的。
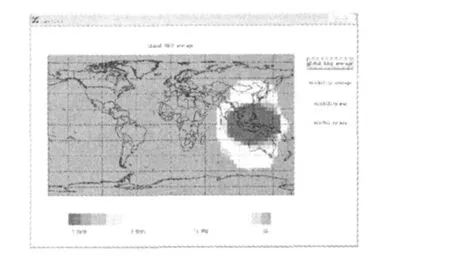
图5 COMPASS全球平均GDOP显示图
由图5可以看出在重点区域(亚太地区)COMPASS系统精度基本能保持在GDOP<10.由于系统本身可用卫星较少,尚无法与GPS比较,但也能在该区域实现定位。特别是南亚地区与中国大陆南部GDOP<5,能实现较好的定位效果。在中国大陆地区,除新疆和西藏部分地区定位精度较差之外,在中国大陆,特别是南部与东南沿海地区,系统可以提供较可靠的定位服务。
由图5可以看到,现阶段COMPASS系统还不具备全球定位的能力,仅仅是区域卫星导航系统,因此利用现有的COMPASS系统提供的服务,同时结合成熟的全球导航系统如GPS,实现重点区域(亚太地区)导航服务性能的提高是完全可能的。
3 COMPASS兼容GPS后导航服务性能分析
因为GPS是现阶段较成熟的全球定位系统,以COMPASS+GPS为例,通过比较GPS在融合了COMPASS前后全球GDOP均值的变化,重点分析亚太地区导航系统精度的改善状况。
由图6可以看到,GPS在全球能实现较好定位,精度最差的两极地区平均GDOP值也在2.5以下,精度最好的赤道地区可以达到1.8,在中国地区,GDOP均值在2左右。
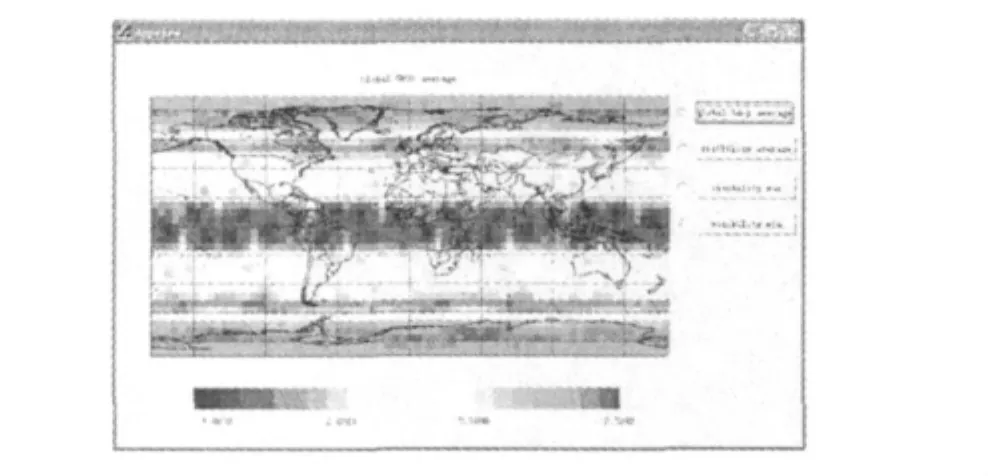
图6 GPS全球平均GDOP显示图
由图7可以看到利用COMPASS+GPS两星座同时定位时,在亚太地区GDOP值有明显改善,在中国GDOP均值下降到1.5。对比图5与图6,可以得出结论:COMPASS+GPS在亚太地区导航服务性能明显比单星座导航服务性能高。
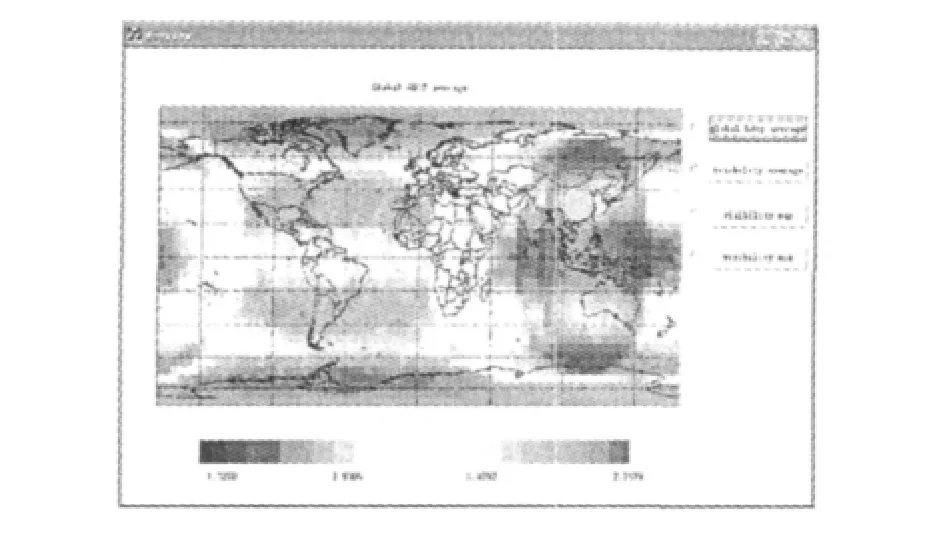
图7 COMPASS+GPS全球平均GDOP均值显示图
4 结 论
分析并利用自研软件仿真了截至2011年1月3日COMPASS基本星座(3颗GEO,3颗IGSO)的全球可见性,测量精度等性能,得出了COMPASS现阶段服务性能特点:
1)在亚太地区基本具备提供区域导航定位服务的能力。亚太地区平均可见4颗星以上,中国大陆平均可见5颗星,局部地区(南海地区,南亚地区)平均可见6颗星。
2)就定位精度而言,以GDOP量化均值为例,在南亚赤道附近性能最好GDOP<5,在中国其定位精度则呈现出南方好于北方,东部好于西部的特点,在长江以南和东南沿海地区GDOP<5,华北地区GDOP<8,东北地区GDOP<11,但在新疆西部和西藏西部部分地区定位精度较差GDOP<15.
3)与GPS兼容并多模接收后在亚太地区导航精度与性能有明显提升,在中国大部分地区GDOP均值由单一GPS定位时的2下降到1.5,在南海与南亚地区GDOP均值由1.8降低到1.3,在整个亚太地区GDOP均值都有约0.5的降低,定位精度和可靠性都有明显提升。
[1]刘基余,李征航,王跃虎,等.全球定位系统原理及其应用.[M]北京:测绘出版社,1995.
[2]Parkinson B W,Spilker Jr J J.Global positioning system:Theory and application(Vol.Ⅰ).progress in astronautics and aeronautics[M].The American Institute of Aeronautics and Astronautics,Inc.Washington,DC,1996:101-105.
[3]Elliott D K,Christopher J.Hegarty.Understanding GPS principles and applications [M].2nd ed,ARTECH HOUSE,2006.
[4]Wolf R.Satellite orbit and ephemeris determination using inter satellite links[D].Munchen:University of Bundeswher,2000.
[5]丛 丽,谈展中.卫星导航几何因子的分析和仿真[J].电子学报,2006,34(12):2204-2208.
[6]周广勇,李良良.基于STK的全球卫星导航定位系统DOP值仿真[J].地理空间信息,2009,7(3):102-104.
