基于Tent映射CPSO和车牌纹理特征的车牌定位
2011-08-18吴加明吴一全
吴加明,吴一全
(南京航空航天大学信息科学与技术学院,江苏南京 210016)
基于Tent映射CPSO和车牌纹理特征的车牌定位
吴加明,吴一全
(南京航空航天大学信息科学与技术学院,江苏南京 210016)
针对现有车牌定位算法定位准确率不高和速度慢等问题,结合车牌纹理特征,提出了一种基于Tent映射混沌粒子群(CPSO)的车牌精确定位算法.首先用基于二维直方图区域斜分的OTSU方法对车牌图像做二值化处理;接着使用三组一维滤波器获取其二值纹理特征向量.然后利用基于Tent映射CPSO快速准确的全局搜索能力,结合二值纹理特征向量构造适应度函数,并引入车牌纹理的一致性度量作为判决条件,找到车牌区域的最佳定位参量.最后,与基于遗传算法(GA)和基本粒子群算法(BPSO)的定位方法进行了比较.实验结果表明,该方法适应性强,定位效果较好,运行时间更短.
车牌纹理特征;Tent映射;混沌;粒子群优化;车牌定位
车牌的自动识别技术在现代交通不断发展的前提下得到了越来越广泛的应用,成为智能交通系统的重要组成部分,主要包括车牌定位、校正和字符分割识别等环节[1].车牌定位技术作为整个车牌自动识别系统的关键,占有非常重要的地位.然而由于车辆种类繁多以及天气等背景的变化,加上车牌图像采集时容易受到各种干扰,给车牌定位带来了很大困难.
目前车辆定位的方法多种多样[2],归纳起来主要有图像彩色信息法[3]、纹理特征法[4]、边缘检测法[5-6]、数学形态学法[7-8]、遗传算法[9-10]、神经网络法[11]等.然而,在背景复杂、车牌区域变形和噪声污损严重的情况下,以上大部分方法得到的结果并不十分理想,甚至会产生拒识或误识,基于遗传算法的车牌定位容易陷入“早熟”,收敛精度不高.
针对以上情况,提出了基于Tent映射混沌粒子群[12-16]和车牌纹理特征相结合的车牌精确定位算法.考虑到传统的车牌特征提取方法会将车牌区域定位在车灯等其他地方,并且在背景复杂或者噪声严重的情况下,定位的结果很不理想,会产生拒识或误识等问题,本文用3组不同的一维滤波器提取车牌的纹理特征,并结合车牌区域的灰度直方图特点,引入车牌纹理的一致性度量作为判决条件,排除车灯等处的干扰,构造一种能够准确反映车牌区域的特征向量.基于遗传算法的车牌定位[9-10]容易陷入“早熟”,影响到车牌的精确定位;基本粒子群算法[17]易陷入局部最优且速度相对较慢,而基于Tent映射的混沌粒子群算法在寻优过程中对停止进化的粒子进行混沌扰动,使解跳出局部极值区,从而提高搜索精确度.因此,本文利用基于Tent映射的混沌粒子群算法,并结合车牌特征矢量,搜索车牌区域的最佳定位参量.最后,在实验结果和分析中给出了定位结果和运行时间,并与基于遗传算法和基本粒子群算法的定位结果进行了比较.实验结果表明,本文方法可显著降低车牌定位的误检率,并且适应性更强,运行时间更短.
1 车牌纹理特征提取
1.1 图像二值化
针对车牌区域,其显著特征是背景单一(车牌底色),牌照字符灰度级基本相同,因此完全可以使用二值图像来代表车牌区域的特征信息,从而使不同光照背景场条件下的车牌图像获得一个统一的描述,避免了不必要的噪声和背景干扰.
最大类间方差法实现图像二值化,一直被认为是阈值自动选择方法中的最优方法,本文采用基于二维直方图区域斜分的OTSU方法对车牌图像进行二值化,使得分割不仅效果好而且速度快,很好地满足了实际要求.如图1所示,图1(a)为原始车牌图像(大小为640×480,256灰度级),图1(b)为OTSU二值化后的图,可以看出二值化的效果很明显,满足后续处理的要求.
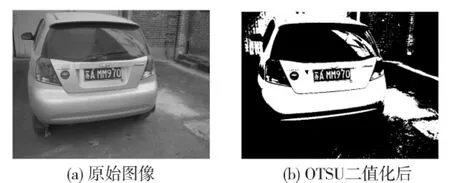
图1 基于二维直方图区域斜分的OTSU二值化Fig.1 OTSU based on 2-D histogram oblique segmentation
1.2 特征提取
从人的视觉特点出发,文献[10]将车牌目标区域的特点归纳如下:1)车牌底色往往与车身颜色、字符颜色有较大差异;2)不同图像中牌照的具体大小、位置不确定,但其长度比变化有一定范围,存在一个最大和最小长宽比,根据这些特点,可以在灰度图像的基础上提取相应的特征;3)车牌内字符之间的间隔比较均匀,字符和牌照底色在灰度值上存在跳变,而字符本身与牌照底的内部都有较均匀灰度;4)车牌有一个连续或由于磨损而不连续的边框,车牌内字符有多个,基本呈水平排列,所以在牌照的矩形区域内存在较丰富的边缘,呈现出规则的纹理特征.
二值化的车牌字符纹理特征最显著的是在水平方向上分布着具有一定疏密度的黑白像素,因此,可以通过采用反映不同疏密度的一维滤波器组在水平方向上对二值图像进行滤波获得车牌图像的纹理特征.本文用3个一维滤波器来进行车牌二值图像的纹理特征提取:
假定车牌区域的左上角顶点坐标为(x,y),长度为l,高度为h,由于车牌区域图像纹理特征具有空间分布的均匀性,对滤波后的图像用其标准偏差σi来表示纹理特征:

式中:f(x,y)为滤波后图像数据;u为图像的平均能量.

这样可以得到车牌区域的特征描述V=[σ1σ2σ3].
实际中车牌区域的纹理特征向量模板值可根据大量样本统计实验后得到,定为Vg=[Vg1Vg2Vg3],设待定矩形区域求得的特征向量为V,则得到距离度量D为

当待定区域的特征向量与样本训练后的模板最匹配时,认为该待定区域即为车牌区域,因此最佳距离度量D*为

但是,大量实验表明,上述方法对车牌区域特征向量描述很容易受到车灯处的干扰,即有很大的概率将车牌定位到车灯、排风扇等处.如图2,图2(a)为车牌图像(大小为640×480,256灰度级),图2(b)为车牌处的灰度直方图,图2(c)为车灯处灰度直方图,可以看出,车牌处直方图有个明显的波峰,而车灯处直方图虽然变换有点平稳但比较剧烈;因此,本文再根据车牌区域灰度直方图的特点,引入一个判决条件,即车牌纹理特征的一致性度量U,使其能够将定位结果为车灯处的情况排除.

式中:0,1,…,L-1 为灰度级,p(i)为灰度i的统计概率,即灰度直方图的纵坐标.
可以看出,车牌灰度直方图反映了一致性度量值U应该较大,而车灯处反而应该较小.为了直观地能够排除车灯处的干扰,本文画出定位结果区域的直方图,计算出其一致性度量值U,若U值小于一个定值(该定值可根据大量实验统计得到),则将其先前计算出的距离度量值D重新设置为一个较大值,从而来排除最终结果定位在车灯处的情况.

图2 车牌图像及其车牌、车灯处灰度直方图Fig.2 The vehicle image and gray histogram of license and light
2 基于Tent映射的混沌粒子群算法
2.1 基本粒子群算法(BPSO)
设在n维解空间中,粒子i的位置为Xi=(Xi1,Xi2,…,Xin),对应的目标函数值pfiti作为评价该粒子优劣程度的适应度;Vi=(Vi1,Vi2,…,Vin)表示粒子从当前位置移动到下一位置的速度.首先对粒子群进行初始化,然后通过迭代方式在解空间中寻找最优解.设在第k次迭代时刻,粒子i的最优解为pbesti(k),称为个体极值,整个粒子群的最优解为gbest(k),称为全局极值.则在第k+1次迭代时刻,按式(2)更新自己的速度.

然后以速度Vi(k+1)移动到下一位置,即

式中:学习因子c1=c2=2;r1、r2是均匀分布在(0,1)上的随机数;惯性因子w=wmax-k(wmax-wmin)/kmax,其中kmax表示总迭代次数,wmax和wmin分别表示最大和最小惯性因子,本文wmax=0.95,wmin=0.4.迭代更新过程中,粒子的速率限制在[Vmin,Vmax],Vmin=-Vmax=-8,位置限制在允许范围内,最后输出的gbest为全局最优解.
2.2 基于Tent映射的混沌粒子群算法
BPSO算法运算机理简单,需要确定的参数少,但易陷入局部极值,难以保证收敛到全局最优解.而混沌具有伪随机性、初值敏感性和遍历性等特点.若利用混沌优化与BPSO结合形成的混沌粒子群算法寻找最优阈值,在寻优过程中对停止进化的粒子产生混沌扰动,使解跳出局部极值区,可以提高搜索精度和算法效率.由于Tent映射比Logistic映射具有更好的遍历性,故采用基于Tent映射的混沌粒子群算法.为了克服Tent映射迭代序列中存在小周期点、不稳周期点的缺陷,引入随机扰动方程,使Tent映射达到小周期点或不动点时重新进入混沌状态.另外,最优粒子反映了粒子种群整体趋于最优解的程度,仅对最优粒子的位置进行混沌映射,可以跳出局部极值且寻优速度更快.
Tent映射方程为

当 Tent映射达到小周期点(0.2,0.4,0.6,0.8)或不动点(0,0.25,0.5,0.75)时,使用以下扰动方程:

在迭代过程中,按下列方程对粒子种群的最优粒子 pregbest(k)=[…]进行混沌迭代变异:

式中:λe称为收缩因子,它决定了变量Xj的变异空间,由式(7)得到.

式中:e为粒子群的进化代数,u用于控制收缩速度,本文中u=2.
结合本文提取的车牌特征矢量构造Tent映射CPSO算法的适应度函数,具体步骤如下.
1)初始化混沌粒子群,以改进的Tent序列产生α个粒子,[x,y,l,h]作为每个粒子的位置,粒子速率在[Vmin,Vmax]上随机产生;工程中,车辆与摄像头的距离可以通过硬件设施设定,在对大量样本统计后,可以将车牌大小定为120≤l≤130,38≤h≤42位置范围也可确定为1≤x≤680-lmax.240≤y≤480-hmax,240为图像高度的一半,这里利用车牌一般在图像下半部的先验知识.
2)按式(1)计算每个粒子的适应度,更新个体最优位置和全局最优位置;并引入判决条件,当不满足判决条件时,将粒子适应度设置为一个较大值,以排除车灯等部位的干扰.
3)按式(4)~(7)对最优粒子的位置进行混沌映射,重新计算其适应度,若大于原适应度,则更新当前最优粒子的位置.如此进行混沌迭代映射直至其迭代次数为r(本文r=10).
4)分别按式(2)和式(3)更新粒子的速度和位置.
5)如果达到总的搜索次数,执行6)否则返回执行2).
6)输出最佳的车牌位置参量,并根据该参量精确提取出车牌.
3 实验结果与分析
为了验证算法的有效性,对大量车牌图像进行了实验.并与基于遗传算法和基本粒子群算法的定位结果进行了比较,说明了本文方法的收敛性更好,运行时间相对较短,定位的效果更加稳定和准确.因篇幅有限,现选取其中4幅图像作为例子加以说明.

图3 随机抽取的4幅车牌图像Fig.3 Four vehicle images selected randomly
图3 中(a)、(b)、(c)、(d)4 幅图像为随机抽取的车牌样本,大小均为640×480,256灰度级,图4中从上到下分别对应图3中4幅图像基于不同方法定位的结果,从左往右分别是基于遗传算法、基本粒子群算法和Tent映射混沌粒子群算法的定位结果.
从图4中可以看出,本文在引入判决条件U后,3种方法都能有效排除车牌特征提取时车灯等的干扰.对于图3(a),3种方法基本都能准确分割;对于图3(b),GA方法存在一定概率只能定位出部分车牌,对后续的字符识别带来困难,而BPSO和TCPSO方法都基本能准确地定位;对于图3(c),BPSO方法存在一定概率只能提取部分车牌,而GA和TCPSO方法均有理想的效果;对于图3(d),GA方法存在一定概率将车牌定位在了车牌上方的排风扇处,BPSO方法也存在一定概率只能提取部分车牌,而本文的TCPSO方法依然能够准确地进行车牌定位.这些错误的定位都是因为在优化搜索过程中,找到的最佳位置参量是局部最优,而非全局最优,也反映了遗传算法容易“早熟”,基本粒子群算法容易陷入局部最优的缺点;而本文方法在4幅图像车牌的提取中均有效准确地找到了最佳定位参量,效果较理想,这也说明了基于Tent映射混沌粒子群算法在搜索全局最优解的过程中,能够有效地避免算法早熟或者陷入局部最优,使得最终得到的结果一定是全局最优,从而准确提取车牌.

图4 3种方法的定位结果Fig.4 Results of the three methods
为了便于比较,针对上述图像的所有实验均是在Intel(R)Pentium(R)1.73 GHz,1.25 GB内存,Matlab 9.0环境中进行的,对抽取的400幅图像进行实验,得到3种方法的定位误检率如表1所示,平均运行时间如表2,其中,GA的种群个数为25,迭代次数为30,BPSO、TCPSO的粒子个数为20,迭代次数为30.

表1 3种方法定位的误检率Table 1 The noise ratio of the three methods %

表2 3种方法的平均运行时间Table 2 The average running time of the three methods s
从表1的数据可以看出,遗传算法和基本粒子群算法的误检率都偏高,这在实际工程应用中满足不了要求,而本文方法的误检率不到1%,说明定位效果很好,能够在实际中得到应用.从表2可以看出,本文方法所需的时间最短,达到毫秒级,能够满足实际中实时系统对车牌识别速度的要求.同时也说明了,本文方法无论在定位效果还是在运行时间上都有很大的优势.
4 结束语
实验表明,本文提取的车牌特征向量能够较好地反映了车牌区域的特点,但是其容易受到车灯等部位的影响,因此引入判决条件U,排除了它的干扰;将该条件作为提取车牌的参考标准,定位的准确度高,不易受噪声、变形等复杂情况的干扰;采用的Tent映射混沌粒子群算法在保证搜索精度的同时大大降低了四维空间的搜索代价,提高了运行速度,与基于遗传算法、基本粒子群算法的定位方法相比,本文方法在定位精度和运算时间上都有明显的优势.
[1]SONG H S H,WANG G Q.The high performance car license plate recognition system and its core techniques[C]//Proceedings of IEEE International Conference on Vehicular Electronics and Safety.Xi’an,China,2005:42-45.
[2]袁宝明,于万波,魏小鹏.汽车牌照定位研究综述[J].大连大学学报,2002,23(2):6-12.
YUAN Baoming,YU Wanbo,WEI Xiaopeng.A survey of license plate location technology[J].Journal of Dalian University,2002,23(2):6-12.
[3]张引,潘云鹤.彩色汽车图像牌照定位新方法[J].中国图象图形学报,2001,6(4):374-377.
ZHANG Yin,PAN Yunhe.A new approach for vehicle license plate locating from color image[J].Journal of Image and Graphics,2001,6(4):374-377.
[4]赵兵,鲁敏,匡纲要,于慧颖.基于混合特征的车牌定位算法[J].计算机工程与设计,2007,28(23):5668-5670.
ZHAO Bing,LU Min,KUANG Gangyao,YU Huiying.License plate location based on mixed characteristics[J].Computer Engineering and Design,2007,28(23):5668-5670.
[5]王昱,赵正校,杨硕.基于直线边缘识别的图像区域定位算法[J].计算机工程,1999,25(9):61-62.
WANG Yu,ZHAO Zhengxiao,YANG Shuo.An algorithm based on fast Hough transformation for zone detection[J].Computer Engineering,1999,25(9):61-62.
[6]ZHENG Danian,ZHAO Yannan,WANG Jiawin.An efficient method of license plate location[J].Pattern Recognition Letters,2005,26(15):2431-2438.
[7]李刚,曾锐利,林凌,王蒙军.基于数学形态学的车牌定位算法[J].仪器仪表学报,2007,28(7):1323-1327.
LI Gang,ZENG Ruili,LIN Ling,WANG Mengjun.Car license plate location algorithm based on mathematical morphology[J].Chinese Journal of Scientific Instrument,2007,28(7):1323-1327.
[8]FENG Yang,ZHENG Ma.Vehicle license plate location based on histogrammingand mathematicalmorphology[C]//Proceedings of Fourth IEEE Workshop on Automatic Identification Advanced Technologies. Buffalo,USA,2005:89-94.
[9]熊军,高敦堂,都思丹,沈庆宏.应用遗传算法进行车牌定位[J].计算机应用,2004,24:163-165.
XIONG Jun,GAO Duntang,DU Sidan,SHEN Qinghong.License plate location based on genetic algorithm[J].Computer Applications,2004,24:163-165.
[10]张玲,刘勇,何伟.自适应遗传算法在车牌定位中的应用[J].计算机应用,2008,28(1):184-186.
ZHANG Ling,LIU Yong,HE Wei.Application of adaptive genetic algorithm in license plate location[J].Computer Applications,2008,28(1):184-186.
[11]盛小明,吴冬敏,芮延年.基于遗传算法的神经网络用于汽车牌照识别的研究[J].机电一体化,2005(6):52-54.
SHENG Xiaoming,WU Dongmin,RUI Yannian.Research of vehicles’license plates recognition based on neural network with genetic algorithm[J].Mechatronics,2005(6):52-54.
[12]SOUSA T,SILVA A,NEVES A.Particle swarm based data mining algorithms for classification tasks[J].Parallel Computing,2004,30(526):767-783.
[13]THOLUDUR A,RAMIREZ W F.Obtaining smoother singular arc policies using a modified iterative dynamic programming algorithm[J].International Journal of Control,1997,8(5):1115-1128.
[14]单梁,强浩,李军.基于Tent映射的混沌优化算法[J].控制与决策,2005(2):179-182.
SHAN Liang,QIANG Hao,LI Jun.Chaotic optimization algorithm based on Tent map[J].Control and Decision,2005(2):179-182.
[15]贾东立,张家树.基于混沌变异的小生境粒子群算法[J]. 控制与决策,2007,22(1):117-120.
JIA Dongli,ZHANG Jiashu.Niche particle swarm optimization combined with chaotic mutation[J].Control and Decision,2007,22(1):117-120.
[16]程志刚,张立庆,李小林,吴晓华.基于Tent映射的混沌混合粒子群优化算法[J].系统工程与电子技术,2007,29(1):103-106.
CHENG Zhigang,ZHANG Liqing,LI Xiaolin,WU Xiaohua.Chaotic hybrid particle swarm optimization algorithm based on Tent map[J].Systems Engineering and Electronics,2007,29(1):103-106.
[17]勾丽杰,郑玉兴,兰静.基于粒子群的车牌定位识别的神经网络方法[J].辽宁省交通高等专科学校学报,2007,9(2):51-53.
GOU Lijie,ZHENG Yuxing,LAN Jing.Neural network of the license plate orientation based on particle swarm algoritbm[J].Journal of Liaoning Provincial College of Communications,2007,9(2):51-53.
[18]熊春荣,黄文明,李美瑾,吕洁.基于字符特征与支持向量机的车牌字符识别[J].自动化技术与应用,2010,29(1):64-66.
XIONG Chunrong,HUANG Wenming,LI Meijin,LV Jie.Research on license plate character recognition based on character characteristic and support vector machine[J].Techniques of Automation and Applications,2010,29(1):64-66.

吴加明,男,1986年生,硕士研究生,主要研究方向为图像处理、车牌识别、信号处理等.

吴一全,男,1963年生,教授,博士,主要研究方向为图像处理与模式识别、目标检测与跟踪、智能信息处理等.发表学术论文90余篇.
License plate location based on texture features and tent chaotic particle swarm optimization
WU Jiaming,WU Yiquan
(School of Information Science and Technology,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
Considering the problems of the low precision ratio and slow arithmetic speed of license plate location,an accurate license plate location method based on tent chaotic particle swarm optimization(TCPSO)was proposed by combining the texture features.First,binarization was adopted to segment the license plate image by the OTSU method,which is based on a 2-D histogram oblique.Then the texture feature vector was obtained by three one-dimensional filters.With the rapid and accurate searching ability,the best location parameters of license plate area were found by constructing the fitness function with the texture feature vector when introducing the texture coherence into the judgment.At last,the proposed method was compared with a genetic algorithm(GA)and BPSO.The experimental results show that the proposed method has stronger adaptability,better location effect,and shorter running time.
texture feature;tent map;chaotic;particle swarm optimization;license plate location
TP18;TN911.73
A
1673-4785(2011)04-0333-06
10.3969/j.issn.1673-4785.2011.04.009
2010-10-03.
国家自然科学基金资助项目(60872065).
吴加明.E-mail:wujiaming42@yahoo.com.cn.
book=6,ebook=87
