脑卒中后遗症患者上肢、手的恢复
2011-08-08铃木三央
铃木三央
陈晓梅1,2,李晏龙3 译
在日常生活活动中,我们每个人都不需要多加思考,就可以熟练、自如地使用双手。久保田认为,手的探索活动,不仅是被动地接受信息,而且在积极地进行手部肌肉运动的同时,从外界环境获取信息。能够很好地使用双手,就证明能够很好地应用大脑,这就是把手称为“外部的脑”的原因所在[1]。脑卒中后,由于脑的损伤引起运动麻痹等各种功能障碍[2]。损伤的大脑具有可塑性,所以发病后的康复对于功能恢复具有很大的意义[3-4]。脑卒中后遗症患者上肢、手的恢复,很大程度上受疾患或外伤引起的脑损伤情况和之后的治疗环境的影响,不同的人会有很大的区别。例如右手为利手的右侧偏瘫患者,有的能够恢复到像患病前那样用左手端碗、右手持筷子进食,或者可以持笔写字;而有的患者右手完全不可见随意运动,需要进行用左手持筷子或书写动作等练习,通过利手交换训练来获得患病前的功能;而对于右侧上肢,是以改善肩胛带和上肢的支持功能为目标。而非瘫痪的左侧上肢,有时会由于姿势控制不充分,出现代偿性的过度运动,导致选择性运动困难,需要在双上肢活动的时候对于姿势控制给予辅助。现通过本病例,就脑卒中后遗症患者上肢、手的治疗和姿势控制的相关性进行讨论。
1 上肢、手的治疗和姿势控制
治疗师在治疗脑卒中后遗症患者的上肢、手功能时,治疗目标有以下几项:预防、改善瘫痪侧上肢的变形、挛缩、疼痛、肿胀等,并通过提高向各个方向的够取动作和手指的操作能力,改善日常生活活动能力。如果能够改善立位和坐位的姿势控制,那么不仅是瘫痪侧,非瘫痪侧上肢的够取范围也会扩大,有利于提高如厕动作中的穿脱裤子等日常生活动作的效率。另外,在操作某物体时,手的构型是否恰当,以及操作程序是否矛盾等知觉、认知能力的改善情况也会影响恢复[5]。上肢、手功能的改善,需要保持坐位平衡、立位平衡的良好姿势控制能力。
2 姿势控制和运动控制
在改善上肢、手功能的同时,必须进行姿势控制的治疗。针对从外部环境获得的感觉信息,姿势以及上肢和手的适应性运动一般由2个系统进行控制:腹内侧系和背外侧系[6-7]。腹内侧系主要包括:①桥网状脊髓束:与直立运动、姿势张力的调整,步行、呼吸模式发生器的修饰等相关;②延髓网状脊髓束:从四肢近端向远端起作用,与脊髓水平的步行模式发生器以及上肢的伸、够运动相关;③顶盖脊髓束:与头颈部的控制及视觉的定位运动、从头颈部到上部胸椎的直立运动相关;④间质核脊髓束:与头颈部的控制及水平方向的眼球运动相关;⑤前庭脊髓束:由于前庭器官的兴奋,伸肌群的张力增加,尤其在步行及立位的重心移动时被激活;⑥皮质脊髓前束:与近位肌及体轴肌的调整相关,如进行躯干、骨盆的从随意到半随意运动和主动运动。背外侧系包括:①皮质脊髓侧束:与手指抓握物体前的准备动作和精细动作相关;②红核脊髓束:与人类退化了的上肢的伸、够运动和粗大的抓、放动作相关,皮质脊髓束受损时有可能由此代偿[8]。腹内侧系主要与姿势控制相关,背外侧系是以调整四肢运动为主的传导通路[6,9-13]。
上肢的伸、够动作主要由延髓网状脊髓束、红核脊髓束控制,而像手指这样需要做精细动作的部位,皮质脊髓束的影响更大。为使手指的功能得到充分发挥,确保姿势控制的桥网状脊髓束的功能十分重要。桥网状脊髓束的主要功能是核心稳定(core stability),这需要通过腹斜肌、腹横肌、多裂肌等腰腹肌群的作用来实现。最近,这种学说的应用扩展到肩胛带、骨盆以及头部和四肢的控制,核心稳定这种学说被广泛提倡[14]。
在立位下做上肢活动时,伴随伸、够运动会产生重心的移动,其结果是在前庭脊髓束的基础上,又增加了被激活的桥网状脊髓束的作用。另一方面,由于对立位或坐位时不稳定的恐惧,会出现前庭脊髓束过度兴奋,使得非瘫痪侧上下肢过度紧张、用力,难以保持稳定的姿势,因此,需要让上下肢适度地用力。日常生活动作中,有很多是在立位下完成的,所以上肢能力改善训练需要在立位状态下进行。
3 正常发育的姿势控制和运动控制的相互作用
在小儿的正常发育过程中,约3个月的婴儿在仰卧位下能够注视合在正中线上的双手[15],双上肢和双下肢可以在较大范围内做伸、够动作,通过在正中位和外侧方向的上下肢反复运动,核心稳定得到发育。同时,在上下肢运动中,停顿以及滞空等动作输入本体感觉的刺激,使运动控制得到发育。在这个时期,将孩子放在俯卧位,可以发现婴儿能够出现肘部支撑,并且可以将单侧上肢伸向感兴趣的玩具。这种伸、够运动,能够促进躯干、头部以及髋关节的伸展活动,也有利于核心稳定的发育。在桥网状脊髓束的作用上再加上前庭脊髓束的作用,更加促进了核心稳定的发育。同时,随着身体重心的左右移动,肘支撑时前臂可见旋前、旋后运动,还伴有腕关节和手指的选择性运动。在上肢、手出现选择性运动的同时,前臂支撑体重更增加了肩胛带的稳定性。就这样,在上肢活动的过程中,姿势控制逐步发育。另外,在仰卧位和俯卧位状态下,运动会引起体重的移动,导致重心负荷分布的变化,这也有利于对上半身、下半身、左半身、右半身等身体图式的发育。这些在卧位状态下的发育,对于坐位下躯干的伸展活动非常有利,大约10个月的时候,双上肢就会从支撑状态下解放出来,能够在空间保持。中枢神经系统在重力环境中将遗传的已经程序化了的感觉、运动体验进行调整,使姿势控制和运动控制在相互影响的同时不断发育[16]。
图1 是纪伊先生对Massin图进行的改编[17-18](参见本期804页图6——编者注)。姿势控制的基础是正常发育过程中自然形成的能力。图中所示的姿势控制的稳定性是核心稳定,通过胎儿期压迫子宫壁等活动而逐渐发育,这对于腹部的稳定性起重要作用。另外也与进行活动时所必须的向各个方向的重心转移、速度和时机调整相关。这两方面都是以本体感觉为主,同时与其他感觉组合之后输入,确立身体内部环境的身体图式。这种姿势控制主要通过反馈来获得。在运动控制方面,前馈控制不伴有运动的姿势,而伴有姿势变化时,为避免姿势丧失平衡,而通过头部、躯干、四肢等局部的反馈来控制。这种姿势前馈先于运动发生,也称为先行性姿势调节(anticipatory postural adjustments,APAs)。APAs的研究主要出现在上肢伸、够动作的研究中[19];但是人在步行的时候,额叶运动区及相关运动区域的皮质活动先于运动产生兴奋[20-21],可见姿势控制和运动控制密切相关[22]。联系到我们的更衣、转移动作等日常生活,在实施任务(运动控制)之前,姿势控制已经做好了准备。可以想象,脑卒中后遗症患者做动作时,容易关注易于进入视野的四肢运动,而不注意躯干的运动,在尚未做好姿势控制之前就开始实施操作,所以容易形成代偿性APAs,治疗师必须在姿势控制方面给予辅助。治疗的主要方针是,注意避免非瘫痪侧的过度代偿,同时促进确保姿势控制稳定性的核心稳定,进行运动控制的再学习和功能改善。
以下通过2个脑卒中后遗症病例的治疗情况,介绍上肢、手的评定和治疗。
4 病例介绍
4.1 病例1 患者为59岁男性,57岁时发病,诊断为左壳核出血引起右侧偏瘫。发病1个月后入住本院,进行了约4个月的住院治疗。出院后接受了3个月为1个疗程,每周1次、每次40 min的门诊治疗共3个疗程。
出院后第1次门诊时的状态是:能够在室内行走,上肢瘫痪的恢复程度:Fugl-Meyer评分为55/66,认知功能检查(MMSE)为30/30,检查日常生活自立程度的功能独立性测量(FIM),除了上下台阶需要扶手之外,其他基本自立,得分为124/126。但是,瘫痪的右上肢参与较少,利用左手进食时,右手很难端起饭碗,只能在桌面上按住饭碗起到固定作用。感觉方面:小鱼际到小指部分有麻的感觉,表浅感觉和本体感觉均良好且无左右差。出院回到家庭之后,可以在自家经营的理发店里扫除掉在地上的毛发、准备擦脸用的毛巾等工作,其中一部分可以双手进行。这些活动都是在较低水平位上使用上肢,手指动作也是以粗大的抓、放为主。患者本人希望能亲自为客人剪发。这个动作需要上肢能够高举到头的位置,而且能够进行肘和腕关节的选择性运动。使用剪刀的时候,在维持食指~小指间4指的近侧指间(PIP)、远侧指间(DIP)关节伸展的同时,屈曲掌指关节从而操作剪刀。本例患者由于上肢上举和手指(尤其是小指)的对掌运动受限,使用剪刀剪发动作非常困难。
4.1.1 姿势、运动控制的能力和上肢功能 患者步行时,在右侧支撑期呈现腰椎前弯,骨盆向右前方过度旋转,髋关节伸展不充分的状态。为防止向前方倾倒,代偿性地将胸廓过度向右后方旋转,包括头部在内的整个躯干向右侧屈,可见轻度的上肢外展、肘关节屈曲的联合反应(图2a、图2b)。同时还伴有翼状肩的出现,即肩胛骨上举、外展时,肩胛骨内侧缘和下角远离胸廓。右下肢摆动期的表现是:在上提骨盆的状态下迈出下肢,在支撑期,胸廓向右后方旋转,更加重了翼状肩。
坐位下观察胸廓(图2c),可以发现右侧乳头被牵拉向上外侧,立位时同样向右后方旋转。腹部肌群向左侧偏移,与左侧相比,右侧骨盆下沉,左侧骨盆被拉向后方。右侧臀部紧张度低,与左侧相比,与座椅的接触面更大。
上肢能力如下:肩关节可上举到90°,肩关节内旋时,伴有肘关节的屈曲和前臂旋前(图2d)。步行时,肩胛骨后撤,翼状肩加重,难以向上方回旋,而这些都由肩胛骨的上举和胸椎、腰椎的过度伸展来代偿。作为理发师所需要做的剪发动作,要求用左手固定毛发,右手则需要在保持肩关节外展的同时操作剪刀,而且要求剪刀保持在与地面平行的水平位上。尝试让患者做打开瓶盖的动作,患者肩关节略外展,利用拇指和食指缓慢地转动了2~3次。即使有意识地让小指参与动作,而小指不能完成对掌功能,而且由于前臂的旋前运动受限,腕关节过度尺偏,只能将瓶体倾斜后才能继续操作(图2e)。手指进行操作的时候,在步行中出现的胸廓向右旋转、肩胛带后撤的非对称性越发明显,这种状态下,是很难利用双手完成剪发动作的。
主要的治疗手段:此时为发病后的3年3个月。对于上肢控制起重要作用的胸廓进行评定时,发现瘫痪侧的肋间到腹部出现明显的短缩,试图在坐位或立位下促进这些部位的分节运动时,遇到非瘫痪侧的过度代偿。所以,治疗初期选择侧卧位进行治疗(图3a)。在侧卧位下,首先使骨盆处于中立位,为防止上肢过度后撤加重翼状肩,可以利用枕头来调整上、下肢的位置。其中,为了修正右侧腹部的对线,减轻过度紧张,需要尽量使右下部肋骨处和下腹部的短缩部位产生活动性;然后,一边减轻前锯肌、上部肋间肌的短缩和竖脊肌群的短缩,一边促进胸廓向正中方向运动,并且给予腹部肌群向心性和离心性收缩的感觉刺激。

图2 病例1治疗前状态
胸廓能够保持在正中位以后,开始修正髋关节的对线(图3b)。用左手把握住下坠的腹部,尝试缓解右外侧的腘绳肌和髂胫韧带的过度紧张。另外,还可以诱导髋关节内、外旋运动,有利于改善下腹部的肌肉和股直肌的短缩。
侧卧位躯干的非对称性有所改善以后,进行了立位下改善右下肢支撑性的治疗(图3c)。立位时,由于出现右侧骨盆前倾、右侧腰背部过度伸展,让患者的下腹部靠近床,双手放在桌子上,保持双侧胸廓对称;治疗师用右手将骨盆保持在正中位,左手把握住瘫痪侧的坐骨结节,向抗重力方向诱导被牵拉向下的外侧腘绳肌。另外,将臀肌群保持在最容易收缩的位置后,让骨盆后倾、伸展下肢使右下肢负重,这也有助于胸廓的伸展。这种治疗有助于股四头肌的收缩,也有助于腹部的核心稳定。进行这类操作时几乎都不使用口头指示,而是治疗师利用手法施加本体感觉刺激,实际上是采用了无意识的桥网状脊髓系统的治疗方法。
立位下的腹部肌群和骨盆周围肌群的姿势紧张得到改善以后,相应地骨盆的非对称性也会得到改善,这时进入胸廓和肩胛带的治疗阶段(图3d)。在前方的台子上放置软枕,指示患者有意识地将右上肢反复向前伸、收,并同时进行骨盆和胸腰椎部的前倾运动。通过这种有意识的运动,能够利用皮质脊髓前束,改善从腰背部到肩胛骨范围的竖脊肌、背阔肌、斜方肌等短缩肌群的弹性。另外,趴卧在软枕上的姿势也对这些肌群的短缩有积极的改善作用。
之后,致力于改善影响上肢上举运动的肩胛带及肩关节周围肌肉的短缩和姿势张力(图3e)。在不引起翼状肩的范围内,让患者右手或双手伸向头后方。治疗师的右手从患者身体前面控制胸廓,左手在背部边保持肩胛骨边,将肱三头肌的起点向关节窝方向诱导。这个运动能够诱发上臂向外展位和正中位的运动,并促进胸大肌低紧张部分以及三角肌尤其是后部纤维的收缩。
4.1.2 手功能 上肢置于桌面上时,瘫痪侧手指的对线如下:与左(健侧)手相比,第3、4、5指的掌指关节过度伸展,小鱼际更多地接触桌面(图4a)。手掌部分是:腕关节尺屈、小鱼际被牵拉向尺骨侧(图4b),手掌较平。由于发病前受过伤,可见拇指掌指关节半脱位;内收肌短缩而引起拇指内收;大鱼际松弛,肌腹不饱满并下垂。另外,2~4指的骨间肌和蚓状肌短缩,造成指间难以外展。
治疗方面:在前臂中立位下与患者握手,治疗师一只手的食指或中指按住豆状骨,以减少过度的尺屈,同时用另一只手固定尺骨。活动桡骨以促进前臂的旋前、旋后(图5a)。这样的运动能够提高附着在前臂骨间膜上的前臂屈肌群的弹性。腕关节的位置接近于中立位后,将小鱼际维持在抗重力位的同时,旋转第一掌骨,促进对掌功能(图5b)。同样也促进了小指的对掌运动,并提高了2~5指的掌骨间的弹性。为了积极促进手内肌的运动,治疗师将手指放在患者指间,做掌指关节屈曲,PIP、DIP关节伸展状态下移动纸巾的动作,促进食指和小指的对掌运动(图5c)。

图3 姿势控制治疗方法
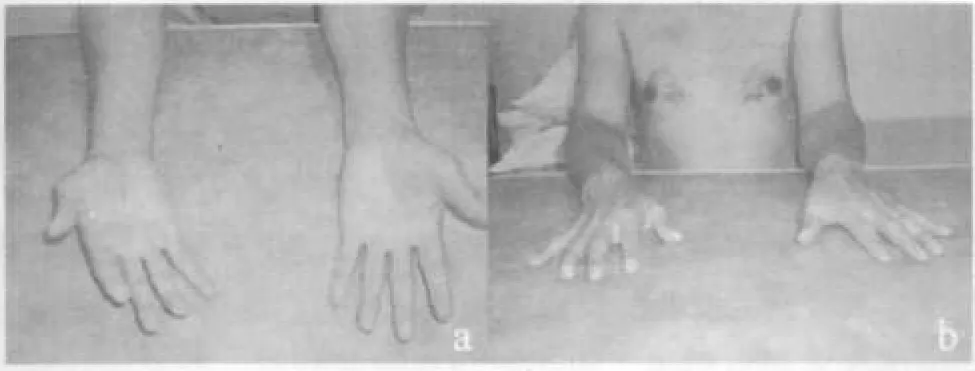
图4 病例1治疗前手的状态
下一步,进入剪发时所必须的在双上肢上举位操作剪刀动作的练习(图5d)。准备一些厚纸来替代毛发,做双上肢90°上举状态下剪纸的动作。但是,在做这个动作时,再次出现了已经在侧卧位改善了的右侧腹部周围肌群的过度紧张。其结果是引起了肩胛带后撤、三角肌收缩能力降低,右手小指难以在掌指关节屈曲,PIP、DIP伸展状态下固定剪刀,只能斜方向剪。因此,需要从前胸部和肩胛带对称性地控制胸廓。另外,为了获得使用剪刀所必需的腕关节掌屈,掌指关节屈曲,PIP、DIP伸展(尤其是小指),可以利用旋转瓶盖等活动进行练习,并在这类活动中施以掌骨间的活动,提高小指固定能力的手法(图5e)。根据小指的对掌功能选择所用瓶盖的大小,由大到小逐渐过度。
一边卷起毛发一边剪发需要手指的灵活性,要求皮质脊髓束的功能。但患者前臂的肱桡肌却处于低紧张状态。而尺侧腕伸肌和指总伸肌等前臂伸肌群过度紧张,影响手指操作所必需的腕关节控制及手内肌运动。因此,从减轻前臂过度紧张着手,防止对手指操作的不良影响(图5f)。
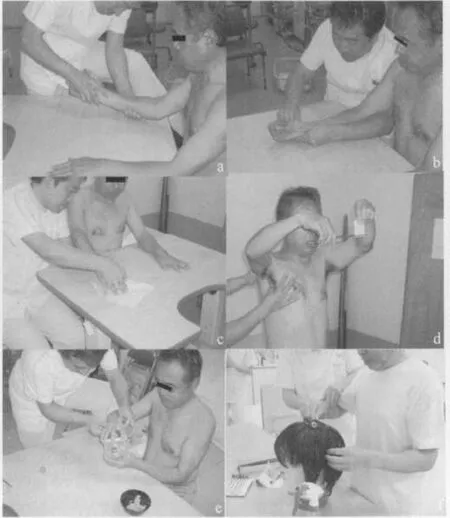
图5 手功能康复

图6 患者理发场景
图6 是在家中工作的景象(在为本文作者剪发)。剪发过程中最难的收边工序,也能够在小指掌指关节屈曲,PIP、DIP伸展位下握住剪刀完成动作。最后的吹干工序也是利用双手的协调动作完成。
上肢的上举能力和手指操作能力有所改善,Fugl-Meyer评分变为59/66。进食动作时,可以使用右手利用改造了筷子完成进食动作,可以短时间内使用正常的筷子。
虽然不能恢复到发病前那样为很多客人剪发,但是能够做到为熟悉和习惯了的客人剪发。可以说在一定程度上恢复了职业能力,增强了自信;与妻子的共同外出活动也比以前频繁了。
4.2 病例2 患者77岁,发病后3周入住本院。诊断为脑梗死引起的左侧偏瘫,住院时间4个月。住院期间,每周做5次,每次40~60 min的作业疗法和运动疗法,周六的治疗时间是20 min。本人的希望是吃饭时用左手能够很好地端住饭碗。
在监管下能够不使用拐杖和辅助具在室内独立行走。但是步行时头偏向左侧,明显可见左侧躯干短缩和左侧胸廓后撤(图7a)。这种步行中的不对称性在用非瘫痪的右手脱右足的袜子时的向足部的伸、够动作也明显可见(图7b)。向左侧坐骨移动重心时,左侧腹部的调整运动不够充分,左侧躯干明显后撤。这时的左上肢也出现明显的后撤,肘关节屈曲,无法向前方伸、够,很难完成用双手穿脱袜子的动作(图7b)。
虽然瘫痪侧的上肢能够上举过头,但是同时伴有左侧胸廓的后撤和肘关节的屈曲(图7c)。能够很缓慢地完成手指屈曲。拇指和小指对掌困难,上肢的Fugl-Meyer评分是42/66,浅感觉和本体感觉基本没有左右差别,认知能力良好,MMSE得分30/30,病房内的ADL自立,FIM得分为108/126。
对于把持饭碗动作的评定及问题点:图7d、图7e显示的是模拟手端饭碗、使用筷子进食的情景,食物用海绵块代替。姿势控制方面的表现为:由于腰背部的短缩和臀肌群中度~轻度低紧张,瘫痪侧骨盆、胸廓后撤;与非瘫痪侧的右侧相比,虽然未见明显的翼状肩,但是可见肩胛骨的上提和上方旋转。三角肌中、轻度低紧张,端饭碗动作中斜方肌上部纤维和胸大肌代偿性过度使用,前臂旋后不充分。拇指内收肌、骨间肌、蚓状肌等手内肌短缩,拇指外展,对掌以及手指的伸展、掌骨间的运动不充分。把持饭碗时,无名指和小指不能触及碗底,其他手指处于屈曲状态。对手指施加了浅表感觉和本体感觉的刺激,但是没有出现修正饭碗倾斜所必需的手指选择性运动。

图7 病例2治疗前的状态
非瘫痪侧的右上肢操作筷子伸向位于正中线方向的饭碗时,瘫痪侧的左侧骨盆和胸廓均出现后撤,其结果是加重了前臂旋前和手指屈曲,把持饭碗的动作也越发困难。
治疗目标是在减轻左侧骨盆和肩胛带周围肌群短缩的同时,促进骨盆和胸廓的抗重力控制能力。另外,通过在前臂和手指输入浅表感觉和本体感觉刺激,促进上肢和手指的选择性运动,改善把持饭碗的能力。
治疗情况:为了改善瘫痪侧臀肌和腹部的低紧张状态,强化骨盆的抗重力运动,从立位开始训练。通过立位下向前方倾斜躯干的运动,减轻竖脊肌、腹斜肌群、背阔肌、肋间肌的短缩造成的躯干短缩(图8a、图8b)。
然后,为了促进三角肌的收缩,让患者将上肢保持在侧方外展位,同时也有助于减轻瘫痪侧的胸大肌锁骨支、前锯肌、肋间肌等肩胛带周围肌群的短缩(图8c)。
坐位,双上肢在身体后方用手掌支撑,前臂旋后、手指伸展。调整左侧肩胛骨内侧缘于脊柱平行,使双侧肩胛骨对称,积极地改善胸大肌及肋间肌的短缩,促进对称性的躯干伸展运动(图 8d)。
手指的治疗:为了改善瘫痪侧短缩的拇内收肌和骨间肌、蚓状肌的弹性,治疗者将手指放入患者拇指和掌骨间,诱导掌指关节屈曲,PIP、DIP伸展运动并扩张指间(图8e)。通过压迫动作向小鱼际输入本体感觉刺激,促进小指伸展和对掌位小鱼际肌群的收缩(图8f)。在促进姿势控制的同时,为激活手指对掌位手内肌的运动,利用来自杯子边缘的表浅感觉刺激,维持PIP、DIP伸展,让患者转动杯中的小球(图8g)。

图8 治疗过程
经过40 min治疗后把持饭碗的状态见图8h。骨盆、左侧胸廓的后撤减轻,前臂旋后和拇指的外展、对掌也有所改善。左手无名指、小指能够接触碗底,其他手指PIP、DIP的伸展也有所改善;右手使用筷子时,左手能够平稳地端住饭碗。最初表现明显的姿势的非对称性(在向足部伸、够时的躯干的后撤和肘部的屈曲等现象)都有所减轻,向左侧的调整运动改善,左右肩峰高度差减小(图9),能够完成双手穿脱袜子动作了。

图9 左右肩峰高度差
5 上肢治疗时的选择性运动
良好的姿势、运动控制是完成上肢、手操作的重要因素。但是,像这类脑卒中后遗症患者在进行手指操作物品的时候,常常有意识地过度用力,造成由于斜方肌过度紧张而引起颈部侧屈及肩胛带上提或后撤。主要原因是皮质脊髓束、顶盖脊髓束、间质核脊髓束、皮质延髓脊髓束的过度活动,造成胸廓的控制下降,结果妨碍了手指的有效操作。因此,需要适度的、随意的手指操作控制。另一方面,除姿势、运动控制以外,手指操作时的表浅感觉、本体感觉等对运动的感觉体系十分重要,需要高度的注意集中力;为维持这种集中力,治疗时要选择患者有愿望并能够维持这种愿望的任务。但是作为治疗师,应设法维持住患者的愿望又要避免由于过度努力而诱发代偿运动。另外,运动学习也需要有回报,必须设计能够体验到成功感又能够得到快乐的任务[23]。这就要求治疗者分阶段设计任务。在运动控制阶段,相对手法的操作、控制会比较多;随着患者活动程度的改善,最终要让患者自己完成动作,也就是“放手”(hand off)。在不丧失运动有效性的前提下,应将过度用力的代偿性运动限制在最小范围内。治疗者根据患者的情况,调整辅助量,分阶段地进行治疗。
在日语中,dissociated movement、isolated movement、independent movement都被翻译成“分离运动”、“选择运动”。但在大约50年前,倡导Bobath方法的Bobath夫人[24]晚年在治疗的时候,就已经考虑到要改善姿势、运动控制,应用前馈、反馈系统理论的同时,进行分阶段治疗。治疗者在dissociated movement、isolated movement阶段,通过手法操作进行选择性运动的准备,并期待逐步减少治疗师的手法操作,向independent movement成功过渡。如果在这个阶段没有获得成功的话,就需要返回手法介入阶段,再为脱离治疗师的手法操作而努力。这样获得的选择性运动不仅对提高运动效率有好处,也能促进大脑皮质的γ-氨基丁酸(GABA)抑制、下行性控制、周边抑制、通过闰绍细胞的返回抑制等,对感觉输入到适当的运动输出所必须的中枢神经系统存在的抑制控制的恢复也有促进作用[25-27]。
日常生活动作是复杂的动作,为了能够使上肢和手能够参与到活动中,要求患者具有较高的姿势、运动控制能力。我们的课题是在治疗过程中,在完成某日常生活活动任务的时候,必须一边评价姿势张力的变化,一边调整手法操作和控制的方式,综合“上手”(hand on)和“放手”(hand off)来开展评价和治疗。
[1]久保田競.手と脳[M].東京:紀伊國屋書店,1983.
[2]久保田競,宮井一郎.脳から見たリハビリテーション[M].東京:ブルーバックス,2005.
[3]Nudo RJ.Postinfarct cortical plasticity and behavioral recovery[J].Stroke,2007,38:840-845.
[4]大槻利夫.片麻痺に対する環境と適応[M].//内山靖.環境と理学療法.東京:医歯薬出版,2004:149-161.
[5]林克樹.観念失行の評価と治療[J].OTジャーナル,1994,28:541-601.
[6]古澤正道.ボバース概念による治療[M].//柳澤健.DVDで学ぶ理学療法テクニック.東京:南江堂,2007:181-205.
[7]佐々木成人.2運動の神経機構(5)運動性下行路による運動制御[M].//伊藤正男.脳神経科学.東京:三輪書店,2003:451-457.
[8]Belhaj-Saïf A,Cheney PD.Plasticity in the distribution of the red nucleus output to forearm muscles after unilateral lesions of the pyramidal tract[J].JNeurophysiol,2004,92:2968-2984.
[9]Saper CB.Brain stem modulation of sensation,movement and consciousness[M].//Kandel ER,Schwartz JH,Jessell TM.Principles of Neural Science.4th ed.New York:Mac-Graw-Hill,2000:889-909.
[10]Haines DE.山内昭雄,訳.ハインズ神経科学アトラス[M].3版.東京:メディカル·サイエンス·インターナショナル,2005.
[11]Steward O.伊藤博信,内山博之,山本直之,訳.第15章運動系Ⅲ[M].機能的神経科学.東京:シュプリンガー·フェアラーク,2004:263-278.
[12]大内田裕.脳幹のプロフィール[M].//松村道一,小田伸午,石原昭彦.脳百話.東京:市村出版,2003:24-25.
[13]Nieuwenhuys R,Voogd J,van Huijzen CHR.水野昇,岩堀修明,中村泰尚,訳.図説中枢神経系[M].2版.東京:医学書院,2003.
[14]Vaughan-Graham J.Core Control[A].Netherlands:The 25th IBITAConference,2009.
[15]Sheridan MD.From birth to Five Years[M].London,New York:Taylor&Francis Ltd.,2000.
[16]Alexander R,Boehme R,Cupps B.高橋智宏,監訳.機能的姿勢-運動スキルの発達[M].東京:協同医書出版社,1997.
[17]Massion J.Postural control system[J].Curr Opin Neurobiol,1994,4:877-887.
[18]Massion J,Alexandrov AV,Frolov AA.Why and How Posture and Movement Coordinate?Brain Mechanisms for the Integration of Posture and Movement[M].Amsterdam:Elsevier,2004:13-27.
[19]Schepens B,Drew T.Independent and convergent signals from the pontomedullary reticular formation contribute to the control of posture and movement during reaching in the cat[J].JNeurophysiol,2004,92:2217-2238.
[20]Suzuki M,Miyai I,Ono T,et al.Prefrontal and premotor cortices are involved in adapting walking and running speed on the treadmill:an optical imaging study[J].Neuroimage,2004,23:1020-1026.
[21]Suzuki M,Miyai I,Ono T,et al.Activities in the frontal cortex and gait performance are modulated by preparation.An fNIRS study[J].Neuroimage,2008,39:600-607.
[22]高草木薫.運動制御と姿勢制御(1)[J].ボバースジャーナル,2008,31:27-41.
[23]久保田競.運動学習と運動前野.学習と脳[M].東京:サイエンス社,2007:159-170.
[24]Bobath B.紀伊克昌,訳.片麻痺の評価と治療[M].東京:医歯薬出版,1992.
[25]Ivanhoe CB,Reistter TA.Spasticity,the misunderstood part of the upper motor neuron syndrome[J].Am JPhys Med Rehabil,2004,83(suppl):S3-S9.
[26]Seki K,Perlmutter SI,Fetz EE.Sensory input to primate spinal cord is presynaptically inhibited during voluntary movement[J].Nature Neurosci,2003,6:1309-1316.
[27]松村道一.運動関連領野における抑制機構と随意運動制御.入門運動神経生理学[M].東京:市村出版,2003:349-356.
