采用Eonstudio技术建立虚拟三坐标测量机的研究
2011-07-29燕1烽1佘爱庸1琳1
娄 燕1, 2,罗 烽1, 2,佘爱庸1,胡 琳1, 2
采用Eonstudio技术建立虚拟三坐标测量机的研究
娄 燕,罗 烽,佘爱庸,胡 琳
(1. 深圳大学机电与控制工程学院,广东深圳518060;2. 深圳市模具先进制造技术重点实验室,广东深圳518060)
利用Eonstudio技术创建虚拟人机交互仿真机,可以避免昂贵设备的损害,节约成本,也可用于昂贵设备的培训系统中。针对该技术实施中真实模型建立和动态仿真交互技术难点,首先利用纹理坐标展开和烘焙技术建立真实感加强的虚拟三坐标设备模型,然后采用Eonstudio技术实现三坐标测量机的人机交互操作,最后利用流套接字编程模型实现两台计算机的信息通讯,完成虚拟三坐标测量设备的建立。在开发的一个初步原型系统中,证明了此方法的适用性和有效性。
计算机应用;虚拟现实;Eonstudio技术;三坐标测量机
虚拟现实是一种可以创建和体验虚拟世界的计算机系统。它是人们借助于计算机技术、传感器技术、仿真技术等仿造和创造虚拟现实空间的人工媒体技术,它是虚拟的,但又是真实的,通过多媒体传感交互设备使人进入真实的环境,从而产生身临其境的感觉。将虚拟现实技术应用到人机交互仿真设备中,可以极大地降低设备成本,较好地开展科研和训练工作。因此,以虚拟现实技术为基础的大型昂贵设备的人机仿真模拟器,近年来成为了一个重要的研究领域。
目前虚拟现实系统一般采用基于VRML-JAVA技术,如浙江理工大学的网络虚拟装配系统,由于VRML语言功能较弱,必须利用其EAI接口与JAVAApple相连,控制场景的装配过程,但它需要大量的编程,对于没有编程经验的人员来说,无疑是一个挑战。并且VRML自身不带有物体之间的碰撞节点,必须由开发人员编写。另外一种虚拟现实方法是基于JAVA3D技术,它综合了VRML和JAVA等语言的优点,是Java语言在三维领域的延伸,是一个高层的基于图形的应用程序接口,并且自带碰撞节点,但是它的图形界面不易掌握,应用不广泛。Eonstudio是一个基于Web3d技术,用来研发和制作交互式3D多媒体应用程序的全新可视化软件工具,是一个完全基于GUI的设计工具。利用Eonstudio,开发人员不需要很多的编程经验,就能快捷方便的制作出复杂、高品质的三维互动模拟程序。目前主要应用于市场、培训、科研、军事等多个领域。
三坐标测量机是一种精密测量设备,是测量和获得尺寸数据的最有效方法之一,因为它可以代替多种表面测量工具及昂贵的组合量规,并把复杂的测量任务所需时间从小时减到分钟,并快速准确地评价尺寸数据,为操作者提供关于生产过程状况的有用信息。三坐标测量机价格昂贵,一般在百万元以上,并且测量探头极易损坏,所以实际使用成本非常高。
因此研究建立基于虚拟现实技术的三坐标测量系统,不仅可以大大降低成本和使用成本,保护测量探头,还可以与真实设备性能相媲美,具有重要的工程实践意义。
本文基于Eonstudio技术,开发虚拟三坐标测量系统,包括虚拟三坐标测量设备环境的建立,被测零件碰撞检测的建立,空间坐标识别的建立,形位误差的计算等。
1 Eonstudio开发环境介绍
Eonstudio是目前全世界公认整合性、延展性最好的虚拟现实开发展示系统,它可以读取55种CAD格式,如3DMAX、Lightava、SOLIDWORKS、PRO/E、AUTOCAD等,支持90%以上的外设而无需编程。
Eonstudio具有300多种功能节点和原型模块,可以产生简单或复杂的形体,也可以调用外部的三维形体,使形体具有颜色、透明效果、材质、贴图;在三维环境中生成灯光、改变灯光、移动灯光;产生各种逻辑判断行为,如移动、旋转、关联、碰撞行为等;改变相机视角,生成多个浏览窗口;通过鼠标拖动方式,无需编写程序,可以方便地给模型加上行为;通过script, C++, EON SDK等与Eonstudio一起使用,可编写复杂的行为程序,进行科研开发。
Eonstudio的应用程序能够以多种方式支持发布,如虚拟显示系统、Internet、CD-ROM、投影显示系统等。如Eonstudio为网页发布提供简易的计算机图形操作接口,使用者可由网页发布精灵中简易的程序轻易将互动性高的EON档案发布成网页。
在Eonstudio的主题视窗包含了几个子视窗。最重要的三个视窗分别为元件视窗(Components Window),包含许多不同功能的nodes以及prototype供用户编辑与应用;模拟环境的元件树状架构(Simulation Tree)以及操控行为定义视窗(Routes Window)。
Eonstudio的数据结构采用场景图的数据结构SimulationTree。它具有方向的不对称性,类似于一棵大树。场景图根节点是Sence节点,下面有许多子节点,如Frame节点、Camera节点等等,子节点下又有许多小子节点,这样一层一层下去,构成完整的虚拟环境和行为控制。每一个节点都对应的属性框Property Bar,可以对节点参数进行修改。另外还有一个操控行为路线栏,Routes,用来控制行为的逻辑性。
2 关键技术
建立三坐标测量机设备,不仅可对零件进行三坐标测量,也可让初学者掌握三坐标测量机的操作,避免三坐标测量探头损坏。虚拟三坐标测量机的总体结构模型如图1所示。

图1 虚拟三坐标测量系统总体结构模型
2.1 建模与渲染
在虚拟现实系统中,三维实体是组成虚拟场景的关键,所以三维物体的创建必不可少。一般三维物体都是通过其它3D软件建立的,然后导入Eonstudio系统中,如ProE、SOLIDWORKS等。本文应用SOLIDWORKS软件,按实际尺寸,反求建立三坐标测量机设备。图2为真实三坐标测量系统平台。
此外,渲染的好坏直接影响虚拟三坐标机的视觉真实性,本文采用UVW坐标展开和烘焙技术,让贴图自带灯光效果,加强虚拟三坐标机的真实自然感。方法如下:首先利用Pelt贴图方法,实现对UV坐标缝隙的展开控制。通过延伸UVW坐标,制作出平展而统一的贴图,从而为设计好的对象制作纹理。通过将UV坐标精确地匹配到目标几何对象上,可以放松UV坐标并删除扭曲。然后利用烘焙技术进行渲染,此时贴图自动带有灯光,有利虚拟物体快速运动。渲染后的虚拟三坐标机如图3所示。

图2 三坐标测量系统操作台平台

图3 渲染后的虚拟三坐标机3D模型
2.2 动态交互仿真
将贴图与虚拟三坐标机3D模型放在一个文件夹下,然后将渲染后的三坐标机动态导入Eonstudio中。采用Eonstuido本身的相机Camera,这样可以利用原型模块ObjectNav添加到场景根节点Sence节点下,对三坐标机进行放大、缩小、旋转,以最佳角度位置进行测量,如图4所示。

图4 虚拟三坐标测量机任意视角调整
2.2.1 虚拟操作
设置键盘控制三坐标机测量探头的移动,然后将操纵杆的按钮分别设置成对应的键盘字母,即可通过操纵杆控制测量探头的移动。利用EON中漫游节点WalkAbout实现此功能。首先在Resource节点下添加3个WalkAbout节点,分别控制测量探针组(包括探针、探针座、横梁)的上下、左右、前后移动。节点属性设置如图5所示。测量探针控制关系如图6所示。
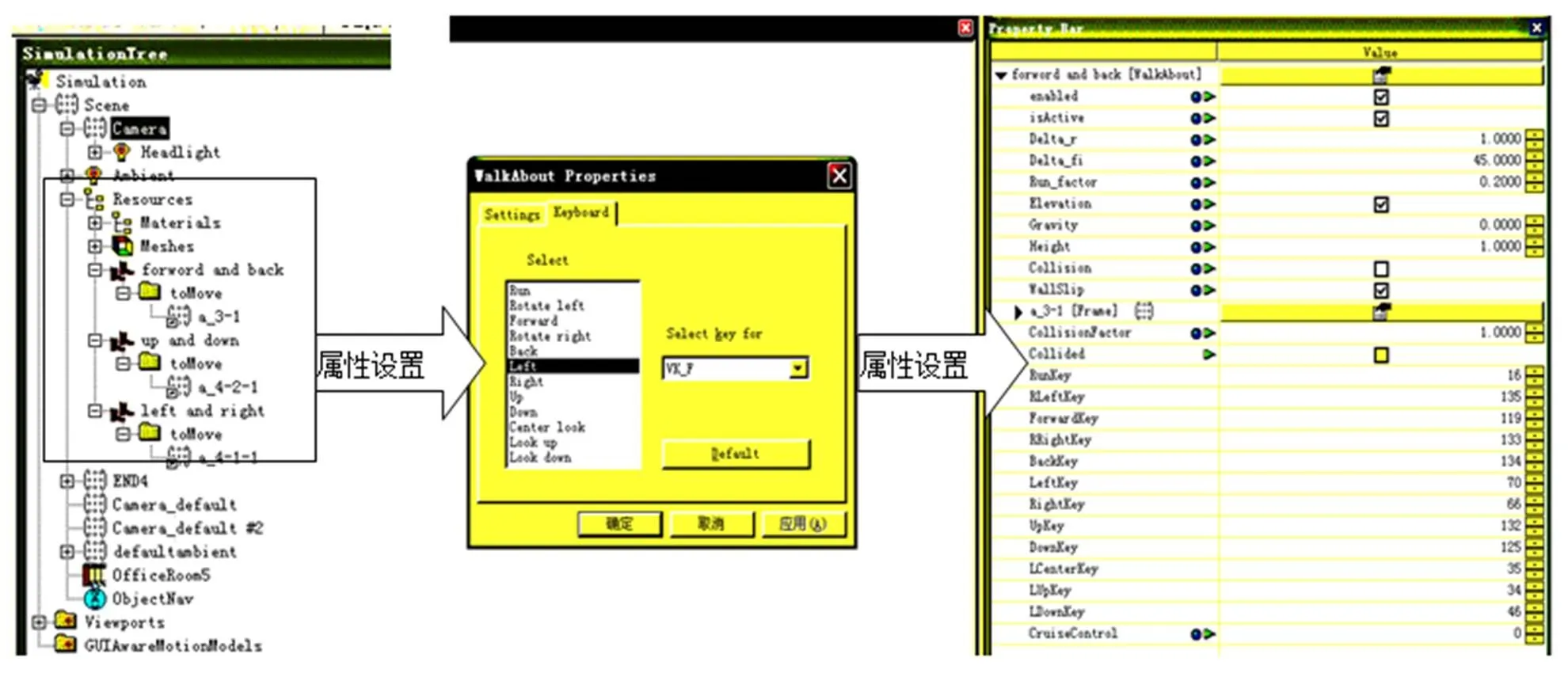
图5 WalkAbout节点及其属性

图6 测量探针组的控制关系图
2.2.2 碰撞节点
采用EON中自带的碰撞节点CollisionManager管理测量探针的碰撞。首先分别在场景节点Sence节点下和需要碰撞的节点,如探针节点下,加入CollisionManager节点,如图7所示。碰撞包围框几何形状有四种:球形、盒形、外壳和自然形状。包围框形状越复杂,碰撞检测所需时间越长,实时性越不好,但检测精度越高。因此,只将探针和被测零件设置为自然形状包围盒,而其余部分由于不是工作面,所以不设置碰撞检测功能。并且如果探针碰上物体,就会发生破碎,如图8所示。

图7 CollisionManager碰撞节点

图8 测量探针包围框(绿色)及碰撞后破碎
2.2.3 坐标点传递
当测量探针测量到所需的三维坐标点以后,然后将坐标信息传递到后台计算机,根据最小包容区原理,进行坐标点的精度计算。
两台计算机的通讯程序主要分为两大部分:服务器端程序及客户端程序,运行时由服务器端程序(server)获取虚拟测量探头相应的信息,并传递给客户端(client),由客户端给出精度计算结果。程序server端及client端之间的通信采用基于连接的客户端/服务器模型即流套接字编程模型实现,其流程图如图9所示。
2.2.4 被测零件实体造型
被测零件的实体造型,由于考虑零件的制造误差,因此选用扫描仪对零件进行三维扫描,扫描图如图10所示。然后将其切片成.stl格式,动态输入到虚拟三坐标机工作平台上。
2.3 测量精度分析
由于被测零件扫描所用的扫描仪精度为50µm,虚拟探针测量碰撞节点精度受到光学鼠标精度影响,为30µm。因此,虚拟三坐标机的测量误差为80µm,基本上达到一般零件测量的要求,但对于精度要求高的零件,还不能满足。

图9 分布式计算机通讯的流程图

(a) 扫描点云图
(b) 修补后的实体图
图10 被测零件3D扫描图
3 一个初步的原型系统
应用Eonstudio开发出的虚拟环境创建工具在实际中有很大的应用价值,它可以很方便地建立起虚拟仿真系统,节省设计时间。
首先将建立好的三坐标机三维模型输入到场景Scene节点树下,然后将被测零件点云图以.stl动态输入到Scene节点树下,并调整被测零件的位置,使其放在三坐标机的大理石平台上。
然后在Resource节点下添加三个WalkAbout节点,并在其子节点toMove下添加需要控制的物体节点,利用键盘分别控制测量探针、探针座和横梁的移动,然后链接到操纵杆上。此时就完成用操纵杆控制虚拟探针的移动了,如图11所示。

图11 三坐标测量VR系统工作台雏形
然后给虚拟探针和被测物体节点下添加碰撞节点,选用自然物体包围框。根据探针与被测物体碰撞时的空间三坐标,将它传递到后台计算机中进行精度计算。
例如,取被测零件某一平面与虚拟探针碰撞时的9个点的坐标,根据相对坐标点和最小包容区原理,计算出该平面的平面度。与实际物体平面度相比,误差为±42µm。主要是由于碰撞包围框、扫描误差、物体空间位置误差累积造成的。
4 结 论
研究利用EON技术构建虚拟三坐标机系统,在实际应用中具有很重要的意义,它可以避免昂贵设备的损害,节约成本,并可以用在昂贵设备的培训系统中。本文采用EON技术对虚拟系统的构建进行了简单的尝试和探索,开发了一个具有初步功能的虚拟三坐标机系统,但是这项工作还只是一个初步尝试,测量误差还较大,对于如何提高精度,还需进一步研究探索。
[1] 任 凯, 蒲金云, 赵 兵. 利用OpenGL实现舰船损害管制虚拟训练舱实时操作的方法[J]. 工程图学学报, 2008, 29(6): 62-67
[2] 陈锐菊, 池建斌, 王 军. 应用Java3D技术构造网络虚拟现实环境的方法[J]. 工程图学学报, 2007, 28(6): 56-60.
[3] 于 辉, 赵经成, 付战平, 等. EON入门与高级应用技巧[M]. 北京: 国防工业出版社, 2008. 5-25.
[4] 韩 涌. 3dsmax超级手册(中)纹理与材质[M]. 北京:希望电子出版社, 2005. 39-53.
Study on Building Virtual Three-coordinate Measuring Machine Based on Eonstuido Technology
LOU Yan, LUO Feng, SHE Ai-yong, HU Lin
( 1. College of Mechatronics and Control Engineering, Shenzhen University, Shenzhen Guangdong 518060, China; 2. Shenzhen Key Laboratory of Advanced Mould Manufacturing Technology, Shenzhen Guangdong 518060, China )
Eonstudio is a most perfect virtual reality language. By using Eonstudio technology, the virtual human-computer interaction machine is built to avoid the damage of expensive equipments and reduce cost, which can also be applied to the training system of expensive equipments. The key technologies are real model construction and dynamic simulation interaction. Firstly the technology of map unwrapping and rendering to textures are used to build more real virtual three-coordinate measuring machine. Then the Eonstudio technology is developed to realize the human-computer simulation interaction. Finally the model of windows sockets are selected to realize the information communication between the two computers. Thus the virtual three-coordinate measuring machine is built. A prototype system is implemented to testify its applicability and validity.
computer application; virtual reality; Eonstudio technology; three-coordinate measuring machine
TP 391
A
1003-0158(2011)01-0076-07
2009-06-02
深圳市模具先进制造技术重点实验室开放基金资助项目(200902);深圳大学2008年实验室基金资助项目
娄 燕(1971-),女,湖南浏阳人,副教授,博士,主要研究方向为虚拟现实、精度设计。
