09-32型捣固车三维模拟驾驶培训系统设计
2011-07-27程华
程 华
(武汉客运专线基础设施维修基地,武汉 430000)
随着我国铁路事业的不断发展,铁路维护工作显得越发重要,并且日益繁重。大型养路机械作为我国铁路维护工作中的主要工具,起着不可替代的作用。09-32型捣固车是铁路系统内应用最为广泛的养路机械,但09-32型捣固车结构复杂、操作难度大、作业空闲时间少,影响了操作员的实际驾驶培训工作,给新操作员的培训工作带来诸多不便。
模拟驾驶培训系统是集传感器技术、计算机技术、三维实时动画技术、计算机接口技术、人工智能技术、数据通信技术、多媒体技术于一体的综合性高新技术系统[1]。它可以接收受培训者通过各种操作发出的指令,在感观效果上做出接近于真实情况的反应,使受培训者有身临其境的感觉,从而加强培训效果,缩短培训时间,可以有效地解决大型养路机械操作员因缺乏实际操作培训而无法快速掌握操作技能的问题。
本文所述模拟驾驶培训系统,在计算机中以virtools软件设计了一套虚拟现实程序,配合三维视景显示方案,能够实现与实际捣固车操作动作一致的三维图像显示。系统包含与实际捣固车操作环境一致的操作台、操作流程和各种指示。系统从操作流程到感官效果实现了虚拟与现实的逼近,可进行09-32型捣固车收放车作业、捣固作业、抄平作业等基本操作的模拟驾驶培训。
1 模拟驾驶培训系统的设计
1.1 系统构成
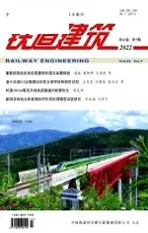
模拟驾驶培训系统由操作台接收操作动作,将操作动作进行编码并传输到计算机中。计算机得到操作编码后与标准的09-32型捣固车操作流程进行对比,根据对比结果,按照实际情况显示具体的动作画面、发出与实际一致的声音并控制操作台上的各种器件进行相应的动作与指示。软件部分使用virtools开发,图形建模使用3Dmax,动作画面使用偏振式三维显示技术通过两台投影仪在投影幕布上进行展示,操作者通过佩戴的三维眼镜即可观察到三维的动作画面,结合听觉与操作台的各种反应,使其有身临其境的操作感觉。整套系统软硬件结构如图1和图2所示。

图1 系统实物
1.2 操作台设计
操作台由三个与捣固车控制箱实际尺寸一致的电气柜构成。电气柜面板上安装有与实际控制箱一致的各类元件,包含按钮开关、旋转开关、指示灯、数码管、计数器、液压表、电位计等。为了实现各种操作动作的检测和反馈信号的输出,针对各种元件设计了具体电路。由于动作元件数量众多,设计了以ARM处理器为核心的主控制板,并对处理器I/O口数量进行了扩展,用于实现集中控制和与计算机进行通信。
电气元件供电电压多为24 V,ARM主控制板为3.3 V电压供电,为实现操作电平转换,各种开关量输入输出器件通过光电耦合电路与主控制板连接,实现信号交互。电位器等元件输出的模拟信号通过A/D转换电路传输到主控制板。各种压力表则改变其驱动方式,使用电信号驱动,用于模拟实际系统的液压状态。为节约主控制板上的I/O口资源,使用串并转换电路进行数码管驱动,显示各种操作数据。
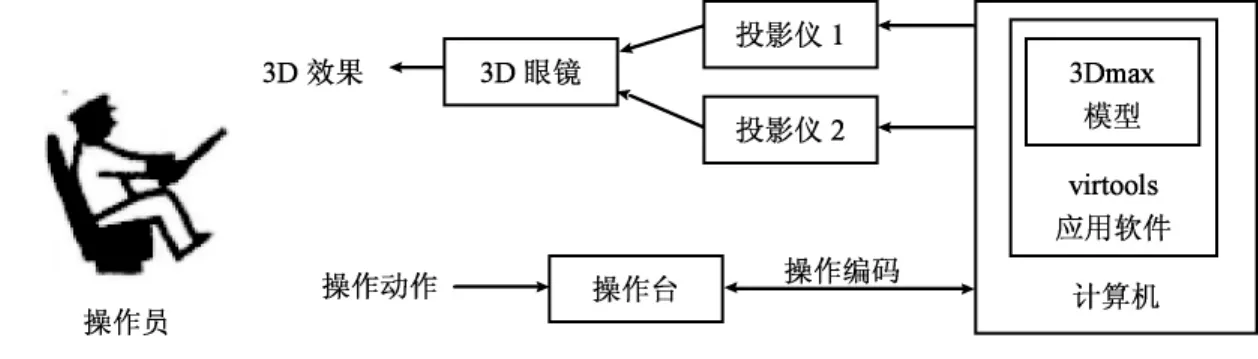
图2 模拟驾驶培训系统构成
主控制板与计算机通信使用RS485方式,保证了通信质量。在接收到操作员的操作信号后,主控制板将信号编码并传输到计算机中,在接收到计算机的反馈指令后,主控制板控制相应的元件进行动作或显示。操作台电路结构如图3所示。
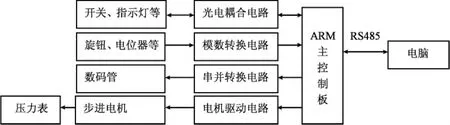
图3 操作台电路结构
1.3 计算机软件设计
计算机虚拟现实软件是系统的核心,是实现模拟实际情况的根本。本系统以各种作业状态下的捣固车为虚拟对象,应用虚拟现实平台virtools构建主要程序框架,采用3Dmax对虚拟捣固车和周边环境进行模型建立,实现捣固车各种作业状态的三维模拟,具有真实性、交互性、语言简洁和易实现等特点。
1.3.1 模型的创建和导入
三维模型的构建主要采用几何建模技术。捣固车和周边环境的轮廓和形状采用了点、直线、多边形、曲线或者曲面方程、图像等方法表示。针对运动场景中远景和近景将对象分为重点和非重点对象,对其分别进行精细建模和粗略建模[2]。将捣固车的实际图片附着在3Dmax建立的模型上,使模型效果更加逼真。以NMO格式保存模型文件,并将NMO文件导入到virtools软件中。导入到virtools三维编辑区的三维或二维元素可以加以观察、控制,也可以安装SDK插件编辑更多的行为模块(BBS),从而实现虚拟单元在虚拟环境中的各种运动功能。捣固车模型如图4所示。
1.3.2 模型的控制
使用virtools对三维编辑区元素进行控制,一种方法是直接调用行为模块库中内置的BBS,另一种是使用VC++手工编写BBS。前者简单方便,后者更为灵活。本系统采用前一种方式,将模块库中内置的BBS添加到具体的虚拟运动单元上,然后在schematic的相应的script中编辑各个参数,从而实现对虚拟单元的运动控制,构建一个逼真的虚拟运动仿真平台。

图4 捣固车模型
整个平台从功能上分为以下几种模块:①单个虚拟运动单元在虚拟空间的旋转、进退、上下等动作(例如:捣固车捣镐的下插与提起,捣固小车的走行,拨道表指针的转动等);②虚拟运动单元之间的协同运动控制(例如:起拨道夹钳的移动与拨道表指针的转动相互协调);③虚拟运动单元之间的相互干涉控制(例如:判断并体现捣固作业是否正确对准枕木空隙)。图5,图6和图7分别是各种功能模块的设计。
1.4 三维显示方案
为提供给操作者更加真实的视觉效果,视景显示选择偏振式三维显示技术。人之所以能够观察到物体立体的图像,是因为左眼和右眼是从不同角度对物体进行观察的,看到的两幅不同的图像叠加形成三维视觉效果。对于常规的平面显示画面,进入左右眼视线的图像是一样的,因此只能构成平面效果。为了让人在平面显示画面中得到三维立体的视觉效果,进入左右眼的应当是两幅从不同角度观察的图像。
图5 捣固小车走行脚本

图6 协同运动脚本

图7 捣固作业成败判断脚本
偏振式三维显示技术使用两台投影仪,分别投放出从两个角度观察的图像。为了避免两幅图像相互干扰,两台投影仪加装了偏振片,分别选择透过垂直方向和水平方向的光线,经过过滤后,投放出来的两幅图像的光线分别分布在垂直方向和水平方向上。观看者佩戴特殊的偏振眼镜,左右眼只能够分别感受到垂直方向的光线和水平方向的光线,这样,投影仪投放出来的两幅图像就分别进入到观看者的左右眼,这两幅图像在大脑中叠加后就形成了三维的视觉效果[3]。
偏振式三维显示技术具有成像效果好,技术成熟等优点,是目前较优秀的三维显示方案之一。原理示意图如图8所示。

图8 偏振式三维显示
2 结语
09-32型捣固车三维模拟驾驶培训系统操作流程与实际一致,情景模拟效果与3D视景,显示效果良好,能够创造具备沉浸感的培训环境,对于捣固车操作员的培训能够起到良好的促进作用。
[1]王晓梅,王贤民.基于 PLC的汽车驾驶模拟器控制系统[J].电气技术,2008(5):90-93.
[2]张雪鹏,陈国华,戴莺莺,等.基于3D的虚拟运动仿真平台设计及 virtools功能实现[J].北京化工大学学报(自然科学版),2009,36(4):93-95.
[3]白云.浅议光学式立体三维显示技术[OL].2008-6-26.[url]http://www.ty360.com/technology/2008/2008_5_15477.htm.