开关磁阻电动机间接位置检测控制系统设计
2011-07-23张青春
张青春
(淮阴工学院,江苏淮安223003)
0引 言
随着现代电力电子技术和数字控制技术的迅速发展,开关磁阻电动机(以下简称SRM)以其调速性能好、结构简单、效率高、成本低等特点,已在迅猛发展的调速电动机领域内争得一席之地,目前广泛应用于牵引运输、通用工业、航空工业、家用电器等领域。位置检测系统是实现开关磁阻电动机调速驱动系统(以下简称SRD)稳定控制的重要部分,检测到的位置信号决定绕组开通与关断,为系统闭环控制提供了控制信号[1-2]。SRD系统大多采用光敏式、磁敏式位置传感器及接近开关来检测转子的位置,位置传感器的存在使得电机结构更复杂、稳定性和可靠性降低,并导致了SRM高速性能的下降,限制了SRD系统在许多工程领域的应用和发展。因此对SRM的无位置传感检测成为当前的一个研究热点。文献[3]和文献[4]提出一种通过相磁通、电流和电感来推断转子位置的方法,该方法需要对磁链进行积分运算,使得计算量很大;文献[5]研究了一种状态观测器估算法,运算量也很大,且误差偏大;另外一些文献还提出了通过检测非激励相的瞬态电感来判断转子位置的方法,但在高速运行状况下不适用。因此本文设计了一种基于能量优化简化磁链法的SRM间接位置检测控制系统,采用此方法间接检测转子最优开关角的位置。
1能量优化简化磁链法原理
简化磁链法的基本思想是将转子位置检测就简化为换相位置检测,当电机单相轮流导通时,首先判断是否已达到换相位置,再将当前换相位置磁链作为参考磁链与积分计算得到的估算磁链进行比较,如果参考磁链大于估算磁链,则还未达到换相位置,此时继续导通当前相;如果参考磁链小于估算磁链,则已达到换相位置,关断当前相,导通下一相[6-7]。为了使SRM有最大输出转矩,一定存在一个最优开关角,本系统预先将不同转速下的最优开关角制成表以备查询,采用简化磁链方法判断是否已达换相位置,进而得到最优开关角的具体位置。
1.1输出功率最大能量优化
设αon(i)和αoff(i)分别是最优开通角和关断角下频率f(i)和磁链ψ(θ,i)的比例系数,αon(i)和αoff(i)是电机转速和相电流的函数,对SRD系统的平均转矩输出和电机运行效率有很大影响。根据开关角最优控制规律,固定SRM的关断角αoff(i),SRM导通角系数由SRD驱动的能量消耗最小的性能优化指标来调节,调节过程如下:
(1)固定关断角αoff(i),设初始导通角为αon(i),由速度控制器输出适合的PWM占空比D,使SRM稳定运行在给定速度。
(2)在SRM稳态运行时,负载转矩不变,驱动系统能量功率消耗:

(3)导通角系数αon(i)增加Δα,即:

(5)测量计算电机功率消耗P,如果ΔP>0,则重复步骤(3),否则Δα<0。
(6)重复上述过程,直到ΔP<0时获得最优导通角。
1.2输出转矩最大能量优化
SRD系统的控制参数主要有开通角θon、关断角θoff、绕组电流i、绕组电压u和角速度ω等。绕组电流i的大小由θon和θoff调节得到,其范围为0<i<Imax(Iref),绕组电压主要取决于母线电压,一般是恒定的,角速度ω为设定值,因此,SRD系统的主要控制变量是θon和θoff。对于转速和转矩一定条件下,θon和θoff有很多种不同的组合,这就存在如何选择最优开通角θon和最优关断角θoff的问题。所以在一定转速时,合理调节θon和θoff能够使SRM输出功率最大,则SRD系统获得角度最佳控制。
2 SRM间接位置检测控制系统
实时而准确地检测SRM转子位置信息是SRD系统可靠运行的前提,传统的SRD控制系统中一般都采用位置检测器或者位置传感器来得到SRM转子位置信号,使得系统成本和复杂程度都增加了,大大影响SRD系统的可靠性[8-9]。因此本系统无需位置传感器,采用能量优化简化磁链法构建了SRM间接位置检测控制系统,如图1所示。
利用磁链间接检测位置信号的电流、转速双闭环控制的原理是:给定速度信号ωref与实时估计出来的反馈转速进行比较,然后通过PI计算得出电流环的给定电流值icmd;给定电流值icmd和实时采样的电流反馈值经过PI调节和PWM控制策略以改变电机绕组的端电压u来控制转速;另一方面,给定电流值icmd和实时估计的反馈转速通过查表得出此转速下的最优开通角αon(i)和最优关断角αoff(i),然后通过能量优化间接磁链位置控制方法来控制导通和关断信号。
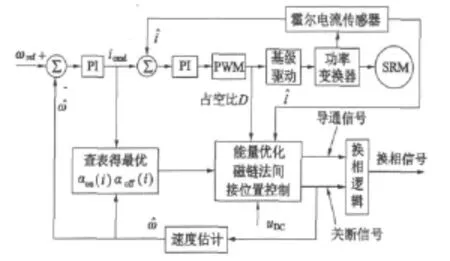
图1 SRM间接位置检测控制系统框图
2.1能量优化磁链间接位置检测
图1中的能量优化磁链间接位置检测模块结构框图如图 2 所示[7,9]。
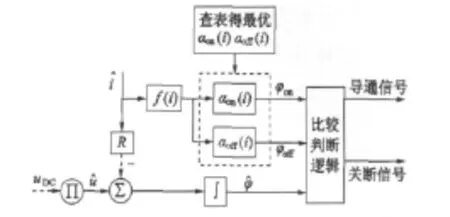
图2 能量优化磁链位置检测模块
2.2电流环控制
电流环的主要作用是用于产生频率固定的PWM控制信号。系统采用TMS320F2407的通用定时器T1来产生所需要的PWM控制信号,采用周期寄存器T1PRE来确定PWM控制信号的频率,采用比较寄存器T1CMPR来确定PWM控制信号的占空比,周期寄存器T1PRE的值P计算如下:

式中:fcpuclk的值为20 MHz,T1CMPR的值范围为0~P,与之对应的占空比D的范围为0~1。
采用近似的线性分析方法构建了PI电流闭环控制模块,通过电流环反馈来确定占空比D,因此开环增益kv和反馈增益kfb设置适当就能获得预期的调节效果,SRM间接位置检测控制系统电流环的控制原理如图3所示。
2.3转速环控制
转速闭环控制是期望值与速度的估计值比较,然后通过PI控制算法补偿两者的差,其中PI控制算法与电流环的PI控制算法一样,都是采用线性分析方法,只是电流环控制采用恒频率的PWM电压控制方式,而转速环采用的是由不同转速而调节开关角的控制方法,控制图如图4所示。控制过程中转速的变化量通过PI环节后得到转矩的给定值,再根据转矩与电流之间的函数关系进一步得到电流的给定值,再调节SRD的开关角,从而使得电流的输出值达到给定值。

图3 电流环原理图

图4 转速环原理图
转速控制环的中断时间间隔不能太长,如果太长,必然会使系统动态响应变慢,对于六相12极定子、10极转子结构电机,定子绕组电感变化一个周期时间:

式中:n为电机转速;T为相电感周期。
相电感周期与转速成反比,由于SRM根据转子位置同步控制,因此一个周期只需要对电机的控制量进行一次有效调整,在转子速度不是很高时,没有必要把调节时间设置很短,本文的电机额定转速是1 000 r/min,根据式(4)计算可知T=2.4 ms时对应的转速为2 500 r/min,本系统所采用的SRM转子的最大转速为2 000 r/min,因此2.4 ms中断间隔时间完全能够满足控制要求。
2.4 软件设计
根据SRM间接位置检测控制系统的原理,系统控制软件设计主要完成以下功能:系统初始化设置,生成ψ-I曲线,以电流分段查找,SRD初始位置的整定,计算实时的ψ并查表比较,给出换相控制信号和PWM信号,以及转速计算等。本系统的软件在TMS320F2407DSP软件开发环境 CCS3.1中编写,采用模块化编程[10]。主程序进行系统初始化设置、给定参考速度和电流值和调用子程序等。主程序流程图如图5所示。
服务子程序包括电流斩波子程序、PI调节子程序、初始位置整定子程序和故障处理子程序等,中断处理程序包括脉冲PWM中断处理程序、换相中断处理程序、A/D转换中断处理程序以及速度中断处理程序等。
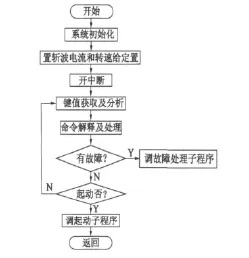
图5 主程序流程图
3实验结果
本文以TMS320LF2407为控制核心,构建了基于能量优化简化磁链法的SRM间接位置检测控制系统,并在起动转速范围0~2 000 r/min、起动过程时间小于2 s、斩波电流40 A的条件下进行了实验研究。图6为基于能量优化简化磁链法的SRM间接位置检测控制系统运行在不同转速下斩波次数和相电流的波形。从图中可看出,转速越提高,相电流斩波次数越少,相电流也相应减小。实验结果表明:随着电机转速的增加,电机的运动电势作用越来越明显,有效地抑制了相电流的上升速率;所设计的基于能量优化简化磁链法的SRM间接位置检测系统能够准确检测控制系统所需控制信号,并通过控制系统获得了期望的相电流波形。
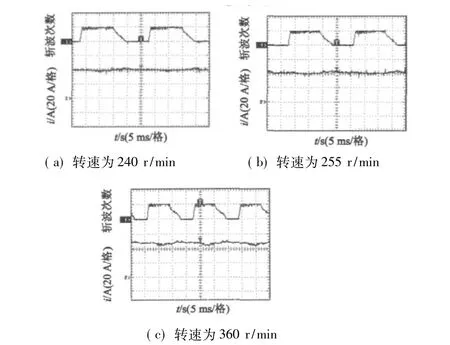
图6 不同转速下的斩波起动相电流波形
4结 语
本文阐述了能量优化简化磁链法的原理,分析了输出功率最大和输出转矩最大两个方面的能量优化实现方法。对能量优化磁链间接位置控制以及系统电流转速双闭环控制进行了设计,构建了基于能量优化简化磁链法的的 SRM间接位置检测控制系统。对系统进行了实验分析,测试了在斩波电流40 A情况下不同转速下的斩波起动想电流波形,结果表明所设计的基于能量优化简化磁链法的SRM间接位置检测方法切实可行,为进一步设计出性能优良的SRD控制系统提供了参考。
[1] 王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1995.
[2] Yang Y G,Yao R P.Research on SRD’s dynamic performance[J].Tsinghua University Journal,1997,37(9):82-85.
[3] Arkadan A A,Kielgas B W.Switched reluctance motor drive systems dynamic performance prediction under internal and external fault conditions[J].IEEE Trans.on Energy Conversion,1994,9(1):36-44.
[4] Saha S.Developing a Sensorless Approach for Switched Reluctance Motors from a New Analytical Model,Conference Records[C]//IEEE-IAS Annual Meeting,1999:525-532.
[5] Wu W,Dunlop J B,Collocott S J,et al.Design Optimization of a Switched Reluctance Motor by Electromagnetic and Thermal Finite-Element Analysis[J].IEEE Transactions on Magnetics,2003,39(5):3334-3336.
[6] Michael T D,Wasim Khan.Self trained commutation algorithm for an SR motor drive system without position sensing[C]//IEEE Industry Applications Society Annual Meeting,New Orleans,Louisians,1997,1:341-348.
[7] 邱亦慧,詹琼华,马志源,等.基于简化磁链法的开关磁阻电机间接位置检测[J].中国电机工程学报,2000,21(10):59-62.
[8] 杨金明,刘文刚,赵世伟,等.开关磁阻直线电动机的位置估计及误差分析[J].微特电机,2009,37(3):6-8,14.
[9] 郑洪涛,蒋静坪.开关磁阻电动机无位置传感器能量优化控制[J].中国电机工程学报,2004,24(1):153-157.
[10] 章云,谢莉萍,雄红艳.DSP控制器及其应用[M].北京:机械工业出版社,2001.
