ITAE最优设计方法在行车控制系统中的应用
2011-07-07尚亚锐马胜毅尹绍清
尚亚锐,马胜毅,尹绍清
(1.西北工业大学 明德学院,西安 710124;2.西安优势环境专业设备有限公司,西安 710065)
1 技术要求
某车间行车空间高度10米,水平运物距离20米,吊运重物升降速度规定为0.2~2米/分钟,天车水平运行速度规定为0.2~3米/分钟。速度根据情况设定。动态过程为:超调σ%=0,调节时间ts≤2秒,行车上装有升降电动机一台,水平电动机一台,行程两端设置有接近开关,电动机带有制动器,其运行示意图如图1所示。
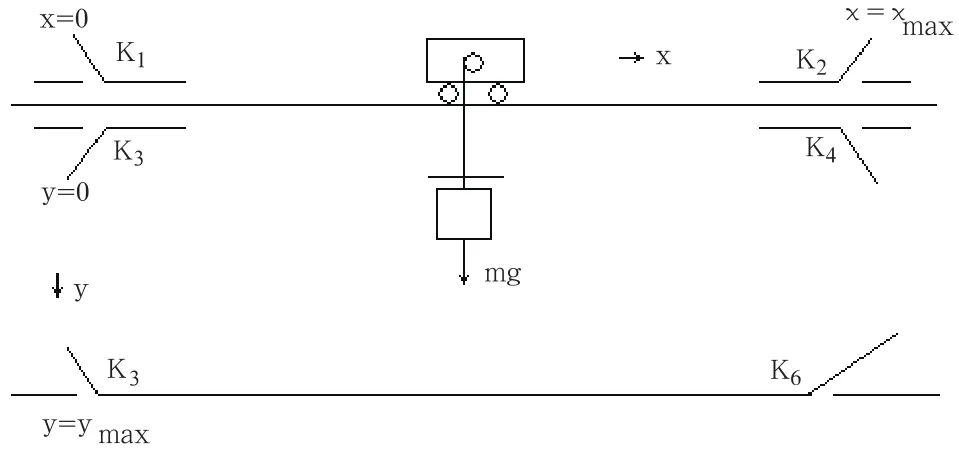
图1 天车吊运重物示意图
2 运行过程
当天车位于左端起始位置x=0,y=0,水平电动机制动器工作,行车固定在左端不动,升降电动机制动器工作吊钩不动。当接通升降电动机电枢电压Ury+,制动器松开,电动机转动(设为逆时针方向),匀速放下吊钩,直到接近开关K5接通,电动机停转,制动器工作,在30秒内挂上重物,然后自动接通电动机电枢电压Ury-,制动器松开,电动机顺时针方向转动将重物升至x=0处,接近开关K3接通,断开电动机电枢电压Ury-,制动器工作,电动机停转,重物位于左上方。此时自动给水平电动机加电压Urx+,制动器松开,水平电动机驱动天车载着重物匀速向右运动,直到最右端接近开关K2接通,电动机停止。小车固定在x=xmax位置,接着给升降电动机接通电源Ury+,电动机匀速将重物下将,直到K6接通,电动机停转等待30秒,将重物取下运走,然后给升降电动机Ury-,电动机将吊钩升至y=0处,K4接通,升降电动机停转,接着自动接通水平电动机电源Urx-,使小车向左匀速运动直到左端停下。
3 校正装置设置
设行车水平运动控制系统结构如图2所示。

图2 天车水平运动控制系统结构图

求出开环传递函数


未校正系统的开环传递函数为:

4 仿真计算的的响应特性
4.1 不加干扰力矩
当行车运行时,不加干扰力矩(行车空载)的simulink仿真图如图3所示,其单位阶跃响应曲线如图4所示。

图3 不加干扰力矩的simulink仿真图

图4 不加干扰力矩的单位阶跃响应图
4.2 加干扰力矩
当行车运行时,加干扰力矩(行车进行运物)的simulink仿真图如图5所示,其单位阶跃响应曲线如图6所示。

图5 加干扰力矩的simulink仿真图

图6 加干扰力矩的单位阶跃响应图
5 结论
从图4和图6可以看出,行车运物系统通过ITAE最优传递函数方法设计后,行车的运行不受运载物体的形状、大小、重量的影响,达到预期平稳运行的效果。
[1] 胡寿松.自动控制原理[M].北京:科学出版社.2007.
[2] 陈隆昌,阎志安,刘新正.控制电机[M].西安:西安电子科技大学出版社.2000.
[3] 钟肇新,彭侃.可编程控制器原理及应用[M].广州:华南理工大学出版社.1994.
