单排行星齿轮机构的运动分析
2011-07-07龚文资
龚文资
(无锡商业职业技术学院,无锡 214153)
0 引言
汽车自动变速器普遍采用行星齿轮传动机构,通常由2~3个单排行星齿轮机构组成。在汽车自动变速器的维修过程中,必须对各档位的动力传递及运动性质进行分析。行星齿轮机构的运动分析方法主要有三种:1)特性方程式计算法;2)定轴轮系转化法;3)速度三角形法。
1 单排行星齿轮机构的组成
如图1所示,单排行星齿轮机构由太阳轮、齿圈和装有行星齿轮的行星架等三个基本元件组成。行星轮在此起惰轮的作用,通常为3~6个,对传动比没有影响。三个元件共同绕公共轴线回转。安装于行星架上的行星齿轮与齿圈和太阳轮相啮合;行星齿轮既可以绕其本身轴线自转,也可以在齿圈内绕公共轴线公转。
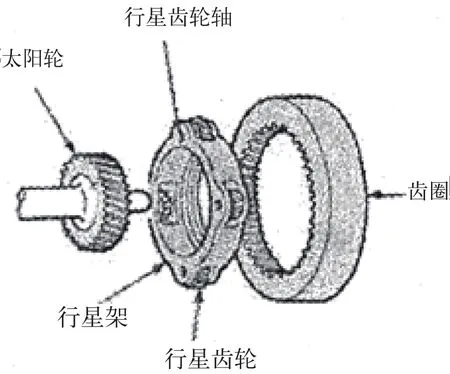
图1 单排行星齿轮机构的组成
2 单排行星齿轮机构的运动分析
2.1 单排行星齿轮机构的自由度分析
作平面运动的机构,当原动件(动力输入件)的数目等于该机构的自由度时,才能够有确定的运动并实现动力输出。机构自由度计算公式:F=3n-2PL- PH,其中:F为机构自由度、n为活动元件数、PL为两元件通过面接触组成的运动低副、PH为两元件通过点或线接触组成的运动高副。
如图2所示,在单排行星齿轮机构中:活动元件数n=4;低副数PL=4;高副数PH=2;自由度F=3×4-2×4-1×2=2。即单排行星齿轮机构中,如果其中一个自由度不被限制(即约束),且只有一个动力输入件和一个动力输出件,则行星齿轮机构无法传递动力。
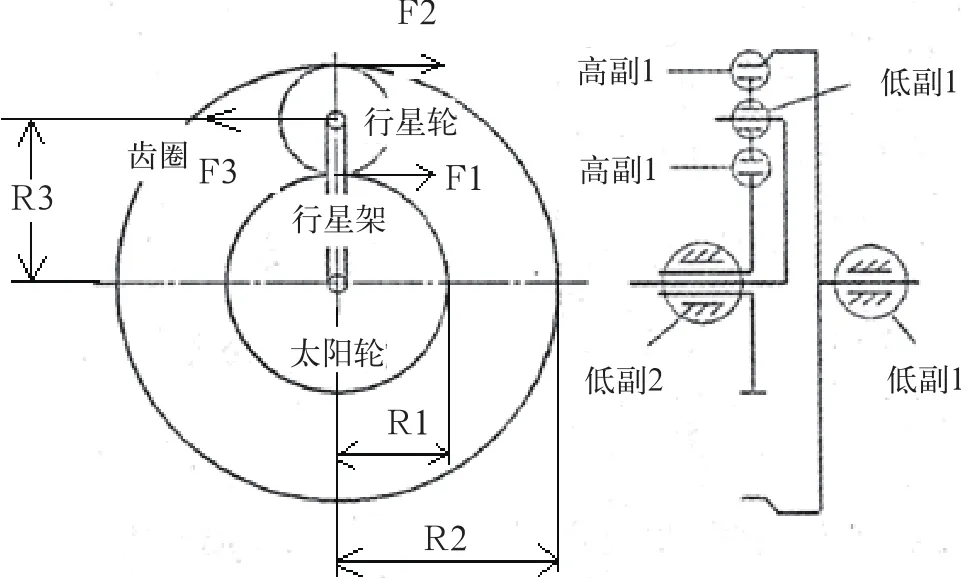
图2 单排行星齿轮机构的摩擦副及行星轮的受力分析
2.2 单排行星齿轮机构的特性方程式
在图2中,设太阳轮、齿圈、行星架的转速分别为n1、n2、n3,齿数分别Zs、Zr、Zc,齿圈与太阳轮的齿数比Zr /Zs=α。对行星齿轮作受力分析,则行星齿轮所受到的作用力F1、F2、F3则如图2所示。
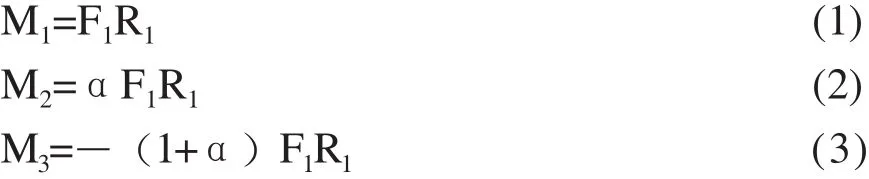
作用于太阳轮上的力矩M1=F1R1。
作用于齿圈上的力矩M2=F2R2。
作用于行星架上的力矩M3=F3R3。
α=Zr /Zs= R2/ R1,则R2=αR1。
又R3=(R1+R2)/2=(1+α)R1/2。
由行星轮的力平衡条件可得
因此,太阳轮、齿圈、行星架上的力矩分别为:
根据能量守恒定律,三个元件上输入和输出的功率的代数和应等于零,即

式中ω1、ω2、ω3分别为太阳轮、齿圈、行星架的角速度。
将(1)、(2)、(3)式的M1、M2、M3代入即得

若以转速代替角速度,则上式可写成

此方程是三元一次方程式,三个未知数,这也反映了单排行星齿轮机构有两个自由度。要使行星排的任二元件间有确定的传动关系,必须再加一个关系方程式。也就是说,对于具有两个自由度的单排行星齿轮机构,必须对某一旋转元件加一约束,使该机构只有一个自由度,才能实现动力传递。
2.3 单排行星齿轮机构的定轴轮系转化
行星齿轮机构属于旋转轮系。在行星齿轮机构中,通常将除输入元件和输出元件之外的约束元件进行固定,这时可将旋转轮系转化为定轴轮系进行传动比的分析,如图3所示。这时,行星架在转化中被量化为一个最大的齿轮,其抽象齿数为太阳轮与齿圈齿数之和,即Zc=Zs+Zr。传动比按定轴轮系计算,转动方向按相互接触的元件(太阳轮或齿圈与行星架)传动时方向相同、相互隔开的元件(太阳轮与齿圈)传动时方向相反来确定。
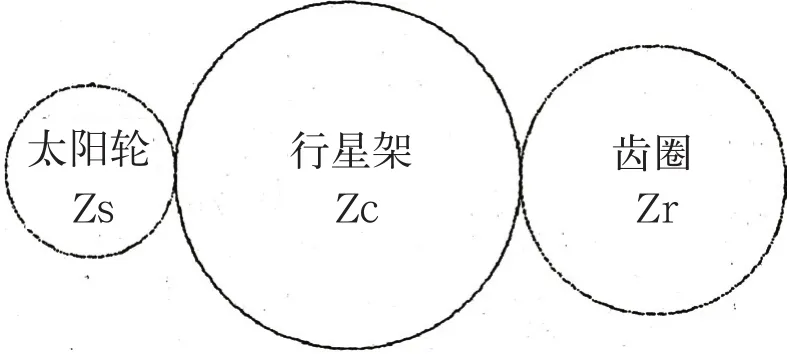
图3 行星架齿数的量化
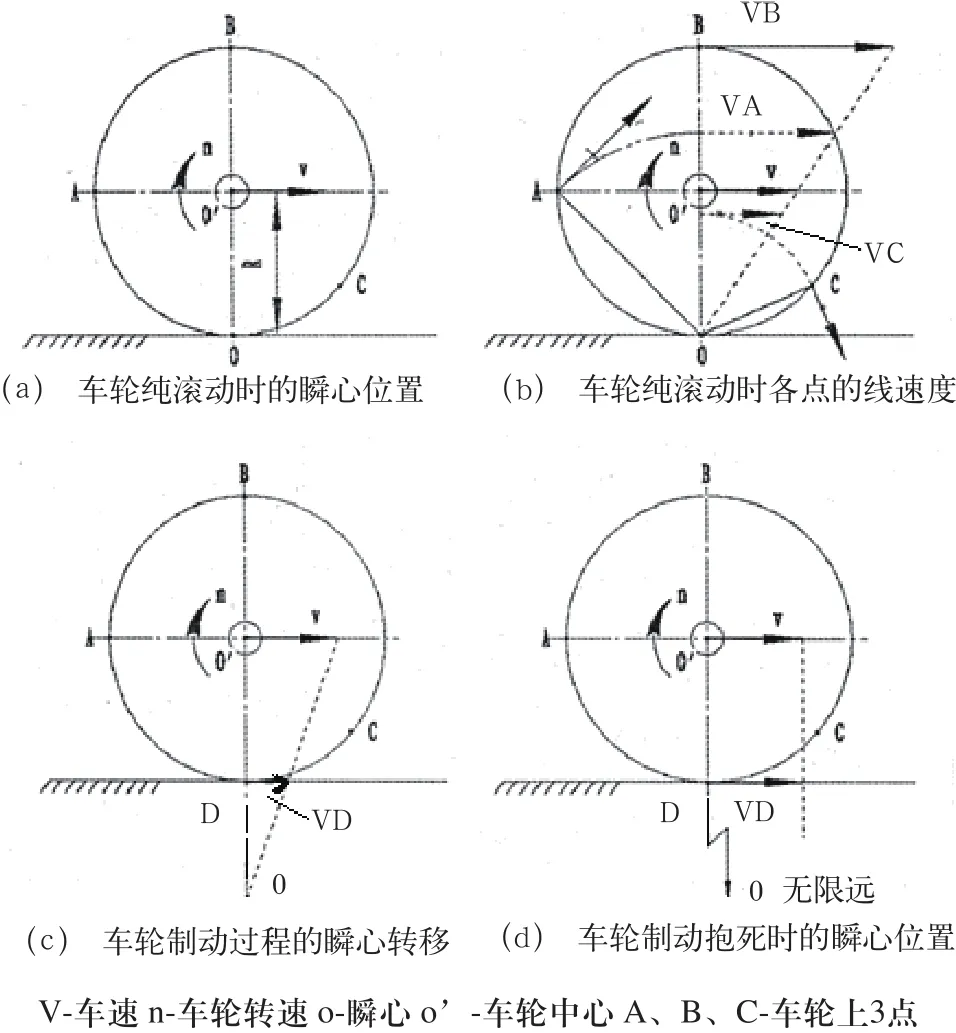
图4 车轮运动的瞬心与速度三角形分析
2.4 单排行星齿轮机构的速度三角形分析法
2.4.1 瞬心
作平面运动的物体(在一个平面内边滚动边移动),其上各点在瞬间都是围绕着某个瞬间不动的点在作纯转动运动,这个瞬间不动的点即为该物体的瞬间回转中心(瞬心),其位置可以在物体内,也可以在物体外,甚至可以在无限远处,并随时间的改变而改变。
如图4所示,车轮在路面上运动时有三种状态:纯滚动、边滚边滑、车轮抱死。在图4(a)中,当车轮在路面上作纯滚动时,在瞬间车轮上的每一点都是以轮胎和路面的接触点为中心而回转的,该点即为瞬心O。在图4(b)中,如果已知车轮中心的线速度V(V=2πRn),按照速度三角形关系便可以快捷地推导出车轮上各点瞬时的线速度的大小及方向。图中VA、VB、VC的大小与该点到瞬心的距离成正比,方向为连线的切线方向。在图4(c)中,为车轮制动滑移时瞬心发生转移的情况,车轮与地面的接触点D的线速度为VD。在图4(d)中,车轮制动抱死时瞬心在无穷远处,车轮上各点的线速度都相等。
2.4.2 速度三角形分析法在单排行星矢轮机构上的应用
单排行星齿轮机构的运动与车轮相似。在如图5所示的单排行星齿轮机构中,如以太阳轮作为动力输入元件,线速度为Vs;固定齿圈;行星架作为动力输出元件,线速度为Vc。根据瞬心及Vs就可确定动力输出元件行星架的线速度Vc的大小及方向。三个元件都以轮系中心轴为公共回转中心,连接公共回转中心及输入Vs的终端并延长与输出Vc相交,该连接延长线我们称之为等速线,相交点所形成的线速度Vd是以公共回转中心为圆心、与输入元件等角速的虚拟线速度。意即Vs与Vd的线速度大小与到公共回转中心的半径距离成正比,也就是说Vs与Vd相对应的角速度是相等的。由上可知,由于Vd>Vc,且方向相同,因此,该传动为前进档的减速传动。
单排行星齿轮传动机构的其他方案分析方法与此类似,在此不再重复。
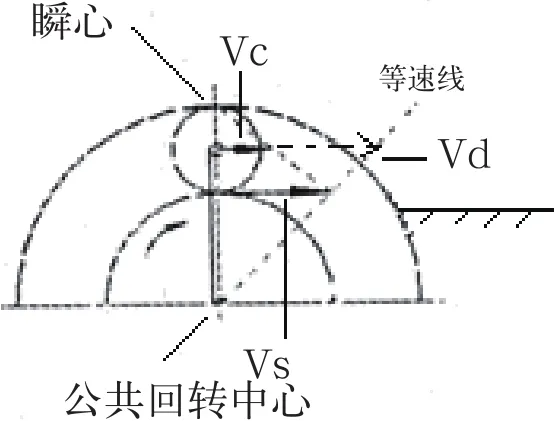
图5 单排行星齿轮机构的速度三角形分析
3 结束语
自动变速器的维修是汽车维修中的难点。在检修自动变速器时,一般要求解体检修前即确定故障的大致部位,这就要求维修人员能借助技术资料分析其输入输出元件的转动方向及传动比的大小。上述三种方法适用于不同知识层次的维修人员进行运动分析。
[1] 王永生.汽车维修技能训练—自动变速器分册[Z].天津:天津工程师范学院.2007.
[2] 张泰岭.汽车自动变速器原理与检修[M].广东.广东科技出版社.2004.
[3] 何元庚.机械原理与机械零件[M].北京:高等教育出版社.1988.
