基于滑膜变结构的PMSM DTC及其恒定开关频率空间矢量调制
2011-07-07李晓竹
李晓竹,刘 凯
(辽宁工程技术大学 电控学院,兴城 125105)
0 引言
本文用两种策略抑制磁链转速转矩脉动:1)采用对称的SVM与DTC结合获得更多的、连续变化的电压空间矢量实现对电机磁链、转矩更精确的控制并获得逆变器开关频率近似恒定;2)采用积分切换的自适应滑模算法与积分环节并联来构成转矩控制器代替传统的PI控制器,利用其积分部分增强抗干扰性能,提高系统的鲁棒性,并联的积分环节可克服滑模控制器带来的转速静态误差。
1 SVM原理
采用SVM的目标是利用逆变器固有的基本空间电压矢量合成所需的参考电压空间矢量。电压源型逆变器(VSI)的8个基本空间电压矢量,其中Ts为系统的采样周期,T0、T1、T2、T3将一个采样周期分四段,φ为相邻参考电压矢量的夹角,且0≤φ≤60o。非零空间电压矢量V1~V6将整个矢量平面均分成6个扇区,两个零空间电压矢量位于中心。在第一扇区中SVM可表示为:

其中,|Vs|是参考电压矢量的幅值,上限值为 Vdc/;Vdc为直流母线电压;|V1|和|V2|是S V M的两个基本电压矢量幅值,。余下的扇区中基本空间电压矢量将随着区域的转换进行相应的变化来合成空间电压矢量Vs。本文采用对称的SVM策略可使直流母线电压获得任意合成电压矢量,同时保证功率器件开关频率恒定。
2 PMSM SVM DTC
如图1所示,Ψs*为定子磁链参考值,Ψs为定子磁链矢量估计值,θ为Ψs的角位置。dTe表示参考转矩T*与估计转矩Te之差。dTe和dδ可由一个PI调节器输出一输入关系得到,Vs由Vs观测器得到,作为SVM的输入调制合成该参考空间电压矢量再送入逆变器产生对称的PWM。
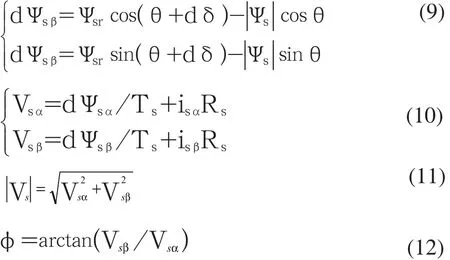
2.1 磁链 、转矩估计器
在PMSM SVM DTC系统中:

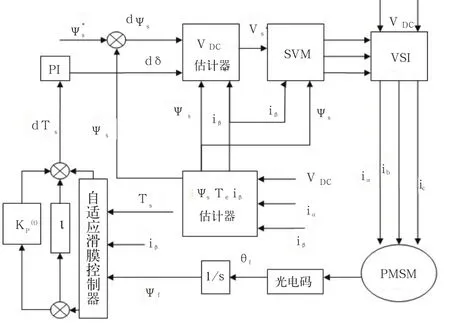
图1 改进型PMSM DTC系统框图
下标α、β为各量在定子两相静止坐标系下的分量。
2.2 Vs估计器
Vs的幅值和φ公式如下:
3 滑膜控制器
本文提出了积分切换的自适应滑模算法来调节转速和转矩,该算法中由于引进了积分环节使得开关状态间的过渡平滑性增强,故减小了在切平面上的“抖动”,由于滑模控制器的输出是离散跳跃式的会使系统在达到稳态时产生转速静差,故在其输出端并联积分环节以抑制静差。
3.1 自适应滑模算法
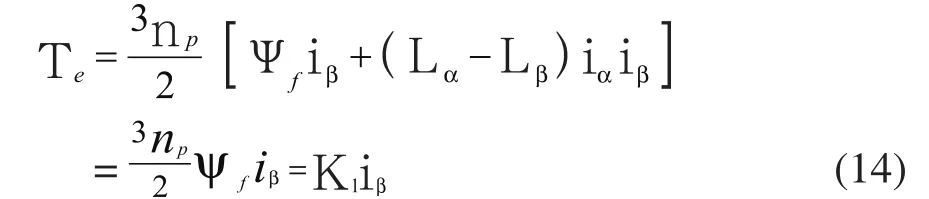
永磁同步电机转矩方程:

电磁转矩Te;负载转矩TL;电机转动惯量J;粘滞系数B;机械角速度ω。
当电机为隐极式即Lα=Lβ,则
考虑到外界干扰和系统参数的不确定性,式(14)可表示为:



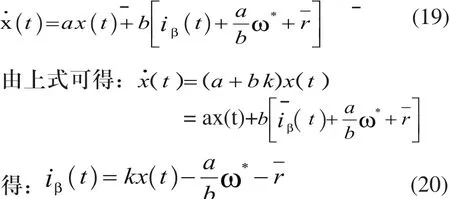
控制律函数为:
3.2 稳定性分析

3.3 改进型滑模变结构转矩控制器
图1中转矩控制模块中PI公式为:

4 实验
为了验证系统的有效性,实验采用了TI公司的TMS320C240EVM板,带编码器的PMSM,VSI型逆变器及其驱动,检测及保护电路,MSO7052A混合信号示波器。电机参数为:Pn=2,Rs=1.88Ω,J=0.0085kg·m2,Lα=Lβ=0.1mH,TL=0.008N· m,Ψf=0.118Wb,滑膜控制器参数:KI=0.5,Kp=2.4,a=2.5。
实验对比可知改进系统中定子电流转速转矩的稳定比传统PMSM DTC系统慢了近0.1秒是由于系统的计算复杂性增加所致。图2的定子电流脉动反应了逆变器开关状态的相应变化,稳定时完美的正弦波证明了改进系统开关频率保持恒定的事实。

图2 前后系统定子电流比较
由图3可看出基于传统PI算法的DTC的转速剧烈抖动着,而改进系统后转速基波脉动消除也弥补了转速静差,启动时平稳上升,稳态时较平直,合乎预期要求。
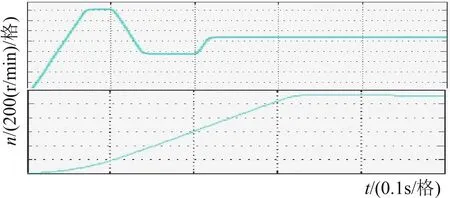
图3 前后系统转速比较
图4显示传统的PMSM DTC磁链存在剧烈的脉动,系统改进后磁链基波脉动已消除。
图5显示转矩基波脉动已消除,并继承了DTC转矩响应迅速的优点,波形在稳态时较平直改善了其稳态性能。

图4 前后系统定子磁链比较

图5 前后系统转矩比较图
由此得出系统的转速、转速、磁链基波脉动明显有效的抑制说明了改进系统的鲁棒性增强,达到了系统设计的要求。
5 结论
实验结果及其与常规PMSM DTC性能的比较验证了本文设计方案的有效性。由于SVM DTC对硬件要求低且性能良好,该算法用DSP器件实现便捷,能有效解决动静态性能之间的矛盾,因此它具有广泛的应用前景。
[1] Z Xu.M F Rahman.Direct torque and fl ux regulation of an IPM synchronous motor drive using variable.structure control approach[C]//The 30th Annunl conference of the IEEE industrial electronics society.November 2-6.2004.Busan.Korea:2733-2738.
[2] Trusca M.Lazea G.An adaptive PID learning controller for periodic robot motion[C]//Proceeding of 2003 IEEE Conference on Control Applications.23-25 June 2003 Page(S):686-689.
[3] Ching-Hung Lee.Yi-Hsiung Lee.Ching-Cheng Teng.A novel robust PID controllers design by fuzzy neural network[c]//American Control Conference on 8-10 May 2002 Page(s):1561-1566.
