基于稳态模型异步电机的效率优化控制策略
2011-06-23黄日俊
黄日俊
(柳州五菱汽车工业有限公司,广西 柳州 545007)
在电动汽车的电机驱动方案中,矢量控制的感应异步电机目前被普遍采用。感应异步电机结构简单,制造工艺成熟,有过载能力强、弱磁控制容易等优点,其缺点是在轻载运行时的效率会降低。而电机的运行效率,直接决定电动汽车运行的经济性,因此如何提高异步电机在低载工况下的运行效率,受到关注,并且有较高的应用价值。
1 效率最优控制思想
异步电机的损耗由铁耗、铜耗、机械损耗和杂散损耗构成,其中铁耗、铜耗为主要损耗。通常情况下,铁耗、铜耗占总损耗的80%~90%,因此异步电机效率最优控制,是运用相应的控制策略,使得电机铁耗与铜耗的总和最小。
由电机理论可知,电机铁耗与磁链成正比,电机铜耗与电流的平方成正比。在矢量控制的算法中,将电机定子电流解耦为正交的激磁电流分量isd和力矩电流分量isq。
其中,isd与电机磁链近似成正比,也近似正比于电机铁耗,力矩电流分量isq2正比于铜耗。通过对isd和isq的单独控制,改变电机的运行转速、转矩和功率。
以电机转矩为例,电机转矩与isd和isq围成的矩形面积成正比,对于电机运行的任一扭矩值,可以有无数的isd和isq的组合与其对应,而其中isd的降低,必然会导致isq的上升,反之依然。
由此可得异步电机效率最优控制思想是:由电机的转速和转矩给定指令,调整定子电流中的激磁电流分量isd和力矩电流分量isq的大小,目标是使得电机的铜耗与铁耗之和最小,通常的做法,是在异步电机的轻载工况采取弱磁策略,即减小isd。
2 效率最优控制的理论推导
异步电机是一个多变量、高阶、强耦合的非线性系统,为了便于分析研究,对实际电机进行如下假设,抽象出理想化电机模型:
(1)三相定子绕组和转子绕组在空间均对称分布,即在空间互差120°电角度,所产生的磁动势沿气隙圆周按正弦分布,即忽略空间谐波;
(2)忽略磁路饱和的影响;
(3)忽略定、转子的漏感;
(4)不考虑频率和温度变化对电阻的影响。
在上述假定条件下,异步电机在任一两相坐标系中的动态数学模型抽象如下:
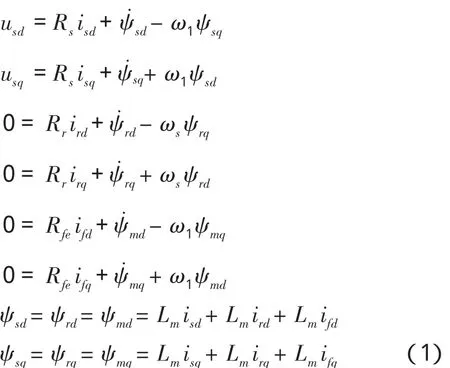
式中,
Rs、Rr、Rfe为定、转子绕阻电阻及铁损等效电阻;
Lm为定、转子绕阻间的互感;
ifd、ifq为两相坐标系中d、q轴铁损等效绕阻电流;
isd、isq、ird、irq为 d、q 轴的定、转子电流;
ψmd、ψmq为 d、q 轴主磁链;
ψsd、ψsq、ψrd、ψrq为 d、q 轴定、转子磁链;
usd、usq为 d、q 轴定子电压。
电机动态等效模型如图1所示。
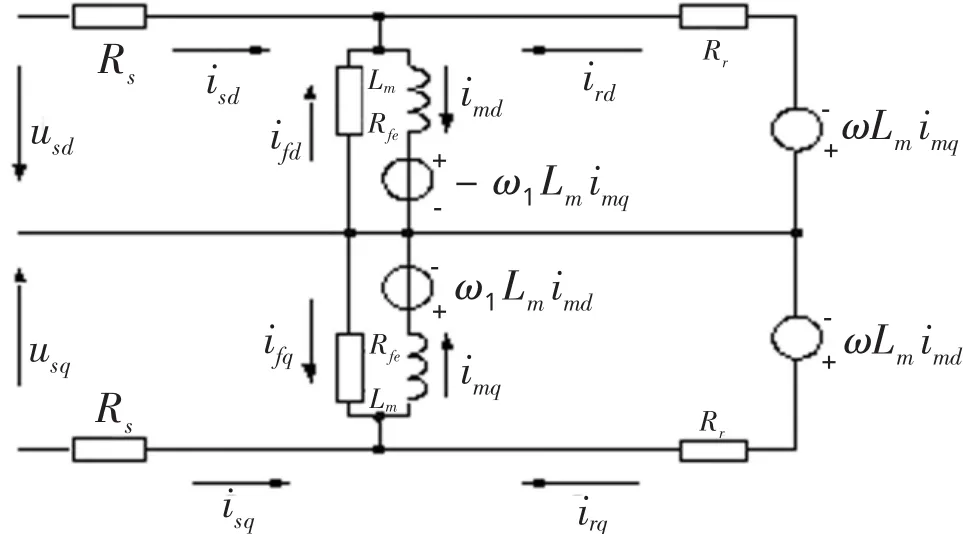
图1 考虑铁耗并忽略定转子漏感时d、q坐标系下电机动态等效模型
为了简化分析过程,将d、q坐标系按转子磁场定向。在转子磁场坐标系下有
ψrd=ψr;
ψrq=ψsq=ψmq=0,
将模型进一步简化,当电机稳定运行时,电流的d、q轴分量为直流,其导数为0,推出电机的稳态方程为
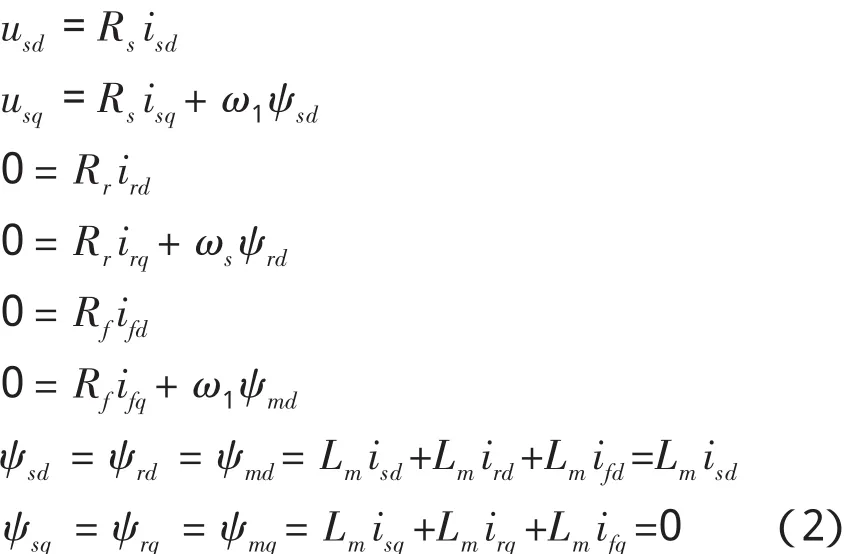
由上式可得出
由此作出电机的稳态等效模型如图2所示。
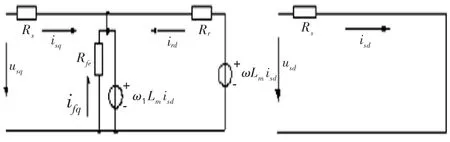
图2 转子磁场定向异步电机的稳态等效模型
由该模型,列方程如下:
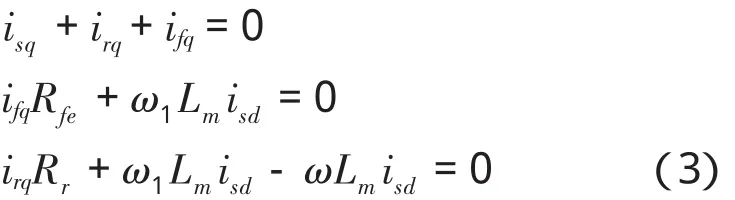
令isqm=isq+ifq,irqm=irq
解此方程组得

定子铁损为
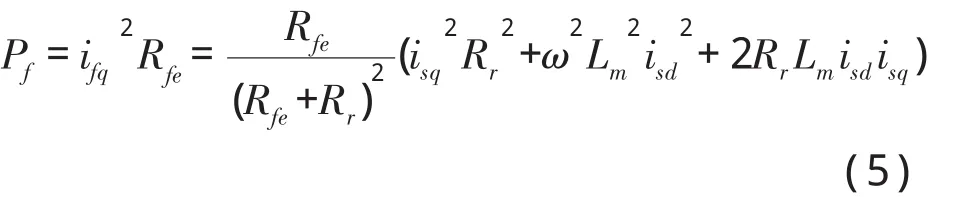
由此,定子铜耗为

转子铜耗为

电机总损耗为

式中,
感应电机的电磁转矩为

式中,np为电机极对数。
一般ifq与isq比相对很小,可忽略不计,则感应电机的电磁转矩近似为

于是得

当电磁转矩Te和电机转速ω一定时,求功率损耗对isd的导数并令其为0,得到总损耗最小的关系式
解之,
因为转子磁链为

上式即为效率最优控制条件下的定子磁链给定。
在此磁链给定条件下,电机的工作效率为
式中,P为电机的输出功率。
3 效率最优控制系统设计
系统采用转子磁场定向矢量控制算法,为实现效率最优控制,在常规的控制模型中加入效率最优化控制模块,该控制模块依据电机的转速反馈和系统的转矩给定,调整定子电流的激磁电流分量isd和力矩电流分量isq,得出定子电流is的给定值,在实现矢量控制的同时,实现效率最优控制。
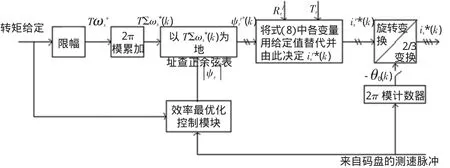
图3 效率最优控制矢量控制系统模型
4 理论计算结果
在实践中,选用了一款6 kW异步电机,参数为
Rs=0.0117 Ω;
Rr=0.0098 Ω;
Lm=0.0018 H;
Rfe=75 Ω;
np=2;
额定转速ω=3000 r/min;
额定转矩Te=19 N·m。
用式(13)和(14)进行计算,计算结果绘制成图,如图4、图5所示。
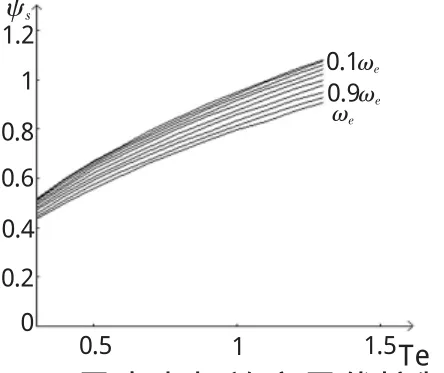
图4 6kW异步电机效率最优控制磁链给定
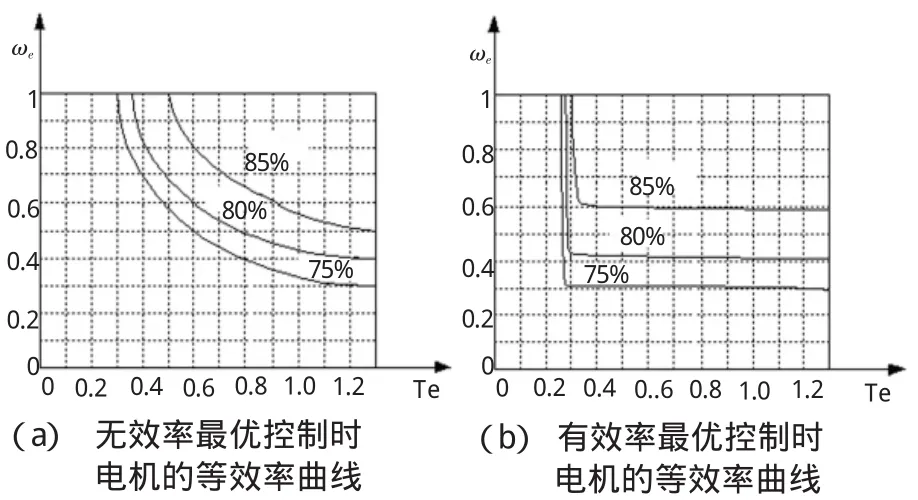
图5 6kW电机高效率运行区的前后比较
从计算结果看出,实施了效率最优控制后,电机在低速轻载运行工况效率有明显的改善,异步电机的高效率运行区域增大,考虑低于75%的效率区域,实施效率最优控制后也有明显改善。
在实施效率最优控制的同时,还应兼顾电机的快速响应性能。在快速的动态响应中,电机的激磁过程比较缓慢,效率最优控制采取的弱磁策略,有可能影响到电机对转矩指令的响应速度,因此激磁给定应设一个下限值,工程实践表明,激磁下限应不低于额定激磁的50%。
5 结束语
本文通过电机的动态模型,推出了电机的稳态模型,并基于稳态模型设计了一种易实现的效率最优控制方法。而实际上的车用电机运行工况非常复杂,所以该方法在电机动态过程的效率最优控制有待于进一步完善。
同时,本文假定电机的定转子参数恒定,假定铁耗与ω无关,这与电机实际运行的状态也有差异,所以采用该方法时,应考虑电机参数变化的控制结果的影响。
[1]陈伯时.电力拖动自动控制系统——运动控制系统(第3版)[M].北京:机械工业出版社,2003.
[2]夏超英.交直流传动系统的自适应控制[M].北京:机械工业出版社,1998.
[3]冯畹芝.电机与电力拖动[M].北京:轻工业出版社,1991.
[4]李海发,王 岩.电机与拖动基础(第3版)[M].北京:清华大学出版社,2005.