基于FlexRay的新型复杂武器总线体系
2011-06-21丁天宝
丁天宝,王 刚,2
(1.西北机电工程研究所 陕西 咸阳 712099;2.电子科技大学 物理电子学院,四川 成都 610054)
当前,信息化是各类复杂武器系统发展的重要趋势之一。而现场总线在武器中的应用则是实现其信息化的主要手段。目前,以“事件触发”机制为基础的CAN总线的最高传输速率只有1Mbit/s,且存在缺少硬件冗余等固有不足;当武器系统变得更加复杂,特别是增加了诸如信息融合、预警以及信息感知等大信息量的节点后,继续采用CAN总线将无法满足未来复杂武器系统更高的要求。
FlexRay总线是由2000年成立的FlexRay联盟推出的一种新型时间触发类高速总线,其最高目标是使FlexRay成为未来汽车高速网络的实际标准。FlexRay总线以“时间触发”通信为主,兼顾“事件触发”,可进行同步数据和异步数据的传输[1]。近年来,许多学者对FlexRay技术展开了广泛的研究[2-5]。然而,FlexRay总线应用仅限于某些控制或测试系统,还未被作为主干网络而用于一个复杂武器系统中。
1 FlexRay总线通信技术主要特点
作为新一代总线技术,FlexRay的通信机制具有如下一些特点[1]:
1)通信速率高。可进行单信道10Mbps的通信,使用两个独立信道进行非冗余通信时,理论最高速率可达20Mbps,是CAN总线最高通信速率的20倍。
2)确定性。FlexRay总线静态段严格采用基于时间触发的总线访问方式,而动态段采用有限确定性的灵活时间触发的总线访问方式。特别是静态段通信可以完全保证节点间数据通信的实时性。
3)容错性。FlexRay总线具有两个完全独立的信道,可以进行节点间数据的冗余通信,这在很大程度上能保证总线通信的容错性。
4)灵活性。FlexRay总线可以配置多种拓扑模式,包括无源总线型拓扑、有源星型拓扑和无源星型拓扑。同时,其通信介质可以是双绞线或是光纤。
5)分布式的时钟同步特性。FlexRay总线提供一种分布式的时钟同步特性,通过该机制可以为整个网络中的所有节点进行相位偏差和频率偏差的纠正,从而保证系统通信的正常运转。
2 新型复杂武器总线体系设计方案
2.1 FlexRay总线通信协议简介
FlexRay总线是一种综合了基于时间触发的TTP和基于柔性时间触发的ByteFlight特点的新型现场总线。FlexRay总线有4个时间等级,由高到低依次是通信周期层、仲裁层、宏拍层和微拍层[1]。如图1所示,在一个FlexRay周期中包含有静态段、动态段、符号窗和网络空闲时间4个部分,这4个时间段都是由若干宏拍(Macro tick)组成的,宏拍是网络级的最小时间单位。而一个宏拍则是由若干微拍(Micro tick)组成,微拍是节点级的最小时间单位,不同节点的微拍长度可以不同。
FlexRay总线上的数据传输单位是数据帧。数据帧包含两种:静态帧和动态帧。在静态段中传输静态帧,用于传输周期发生的消息;动态段中传输动态帧,用于传输以某种事件激发而产生的消息。FlexRay总线上数据帧包含的有效数据长度为0~254字节。在一个网络中所有的静态帧长度均相同,动态帧的长度可以不同。
在一个无源总线型拓扑的FlexRay网络中可以包含的节点数为2~24个。通过使用有源星型耦合器,可以将多个总线型FlexRay网络进行级联,从而满足更多的需要。
2.2 基于FlexRay的新型复杂武器总线体系的设计实例

弹炮一体防空武器系统是一类典型的复杂防空武器系统。以该武器系统为例,构建一套基于FlexRay的总线体系。整个总线体系由两簇FlexRay子网络构成,两个子网络均采用总线型拓扑结构。
具体的技术方案可以用图2来表示。图2为本文提供的弹炮一体防空武器装备上FlexRay主干网络拓扑结构框图,包括两簇FlexRay子网络。其通信线路为双绞线。FlexRay总线的数据通信速率为10Mbps,以双通道模式进行数据的冗余收发,总线两端的节点加100Ω终端电阻。

由于网络中节点较多(共35个),根据FlexRay协议对网络中节点数目的规定,将整个FlexRay网络被分成了两个簇C1(18个节点)和C2(17个节点)。其中的各个节点如表1所示。
需要指出的是,C1和C2两个簇都采用总线型拓扑结构,通过FlexRay星型耦合器连接在一起。由于总线网络中的35个节点所传输的信息在容错性方面都有较高的要求,因此,两个簇C1和C2都使用了双通道的冗余发送模式来保证信息的容错性。
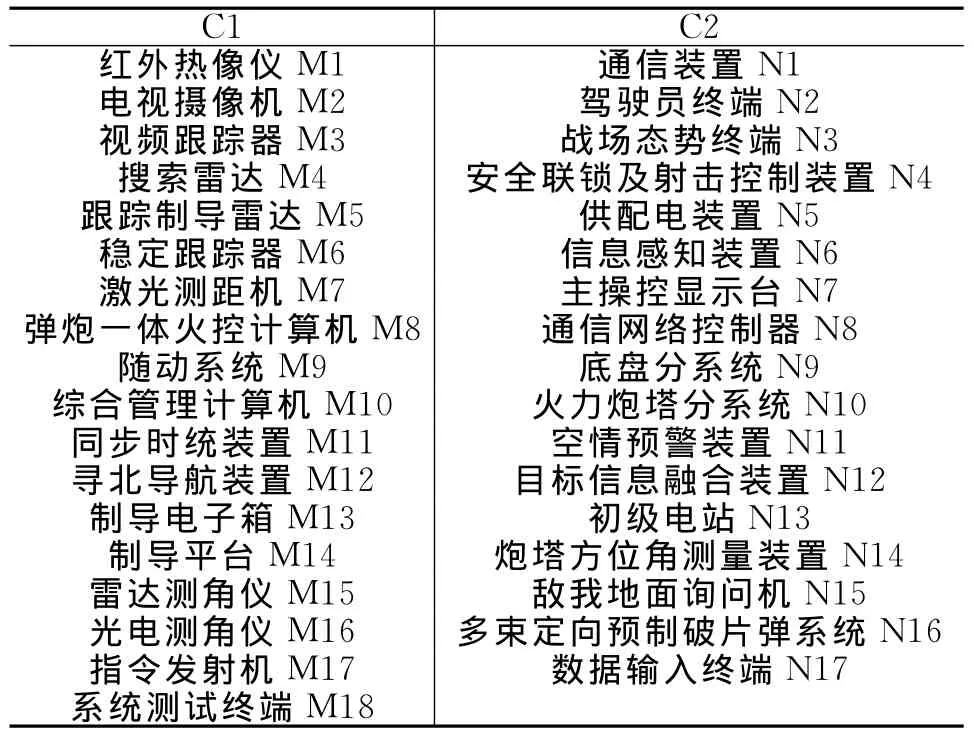
表1 弹炮一体防空武器中FlexRay总线体系节点Tab.1 Nodes of bus system in missile-gun integrated antiaircraft weapon
3 新型FlexRay总线体系实验结果
对弹炮一体防空武器中FlexRay总线网络分块进行了测试。实验中的网络由3个FlexRay节点组成,其硬件为Vector的VN3300接口卡,该接口卡通过PCI总线与工控机相连。例如,这3个节点A、B、C分别用于模拟所构建总线体系中的通信网络控制器、战场态势终端以及驾驶员终端。另外还有一个监控节点,其硬件为Vector的VN7600,通过USB接口与工控机相连,利用该节点中的软件CANoe.FlexRay能够对该网络进行多种监控和分析。具体的实验框图如图3所示。

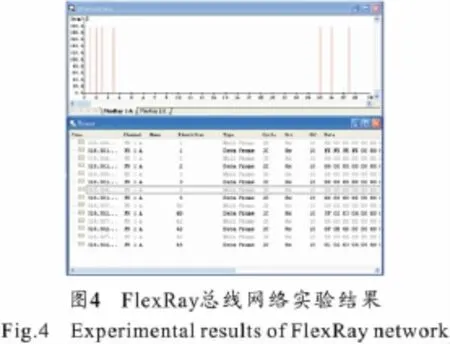
实验利用VN系列产品的XL Library对A、B和C 3个节点进行相应的软件设计来控制其数据的收发。实验中的网络参数为:波特率10Mbps,通信周期5ms,静态段时长3.5ms,动态段时长1.3ms。试验中只研究了静态帧的发送和接收。A、B和C 3个节点的数据收发关系为:A节点在第40时隙发送1个数据帧,B节点在第42时隙发送1个数据帧,C节点在45时隙发送1个数据帧。另外,这3个节点的同步帧发送时隙分别为第1、3和5时隙。图4就是通过安装在节点D上的CANoe.FlexRay监控到的结果。可以看出,这和设计完全一致。
需要说明的是,尽管在实验中只有3个节点组成FlexRay网络,但在该实验结果的基础上经过推理不难验证在前一小节设计的35个节点组成1个FlexRay总线体系的方案是完全可行的。
4 结 论
作者提出了基于FlexRay总线技术的复杂武器的总线体系。通过实验验证,证实了所提出的技术方案在原理上的正确性和工程可行性。此技术为未来复杂武器的信息化发展开辟了一个重要领域,具有较高的推广应用价值。
(References)
[1]FlexRay consortium.FlexRay communication system protocol specification,version 2.1[S]2005.
[2]KANG MINKOO,PARK KIEJIN,KIM BONGJUN.Determining the size of a static segment and analyzing the Utilization of In-Vehicle FlexRay Newwork[C].The Third 2008International Conference on Convergence and Hybrid Information Technology,Seoal,2008:50-53.
[3]POP T,POP P,ELES P,et al.Timing analysis of the FlexRay commucation protocol[J].Real-Time Systems,2008,39(1):205-235.
[4]XU Chuang-yan,ZHANG Yong.Simulation of FlexRay communication using C language[C].2008International Symposium on Computer Science and Computational Technology,Beijing,2008:272-276.
[5]SCHMIDT K,SCHMIDT E G.Message scheduling for the FlexRay protocol:The static segment[J].IEEE Transactions on Vehicular Technology,2009,58(5):2170-2179.