无轴承开关磁阻电动机模型分析与控制
2011-06-19裴丽娜葛宝明
裴丽娜,葛宝明
(北京交通大学,北京100044)
0 引 言
无轴承开关磁阻电动机(以下简称BSRM),它具有结构简单、无磨损、无需润滑且长寿命的特点,许多学者对其进行了深入研究,取得许多重大的突破[1-8]。
由于它是特有的双凸极结构,使得当转子在某一自由度出现偏心时,与其正交的另一自由度上气隙长度也会发生变化,这种径向位置的耦合导致了两自由度上的径向力也存在强耦合,是一个多变量、非线性、强耦合的复杂系统[3]。
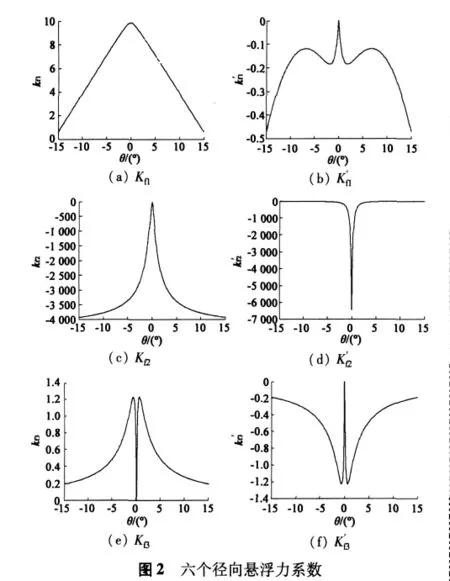
本文研究的电机模型[3]有六个悬浮力系数,要设计一个控制器对其径向两自由度进行解耦,文中对六个悬浮力系数进行具体分析,并对两个系数、四个系数和六个系数的控制器进行了仿真,通过对仿真结果的比较分析,证明了两个系数的控制器和四个、六个系数的控制器在控制性能上相差不大,可以用两个系数的控制器来控制六个系数的电机模型。
1 BSRM径向力模型
1.1 径向力产生模型
以12/8结构的BSRM为例,图1为中A相定子绕组结构图。电机A相主绕组 Nma由四个线圈串联组成,悬浮力绕组 Nsa1和 Nsa2分别由两个线圈组成。B相和C相的绕组构成与A相相同,分别位于A相旋转方向的1/3和2 /3处。图1中带箭头的粗实线表示主绕组电流ima产生的磁通即偏磁磁通,虚线表示径向力绕组电流isa1产生的磁通即控制磁通,它们两者相互叠加,使得气隙1处的磁密增大,而气隙3处的磁密减小,由此造成转子所有电磁力不平衡而指向α轴正向。同理,可得与α方向相互垂直的β方向上所受的电磁力。通过利用转子每隔15°会轮流导通和转子位移负反馈控制,可以产生转子悬浮所需的径向悬浮力[3]。

图1 A相定子绕组结构图
1.2 径向力数学模型
根据已有文献[3]的推导,考虑径向位移影响,径向力的解析表达式如下:

其中:

式中:Nm、Ns为主绕组匝数和径向力绕组匝数;μ0空气磁导率,其值通常约为4π×10-7;l为定子叠片长度;r为转子极半径;lg0为定、转子中心重合时的平均气隙长度;θ为转子位置角。
A相工作时,-15°≤θ≤0°,A相悬浮力:

B 相工作时,0°≤θ≤15°,B 相悬浮力:

C 相工作时,15°≤θ≤30°,C 相悬浮力:

其中,b1、b2和c1、c2分别为B相、C相两个方向的绕组轴线。
仿真中以设计的磁悬浮开关磁阻电动机为控制对象[6],电机相关参数如表1所示。
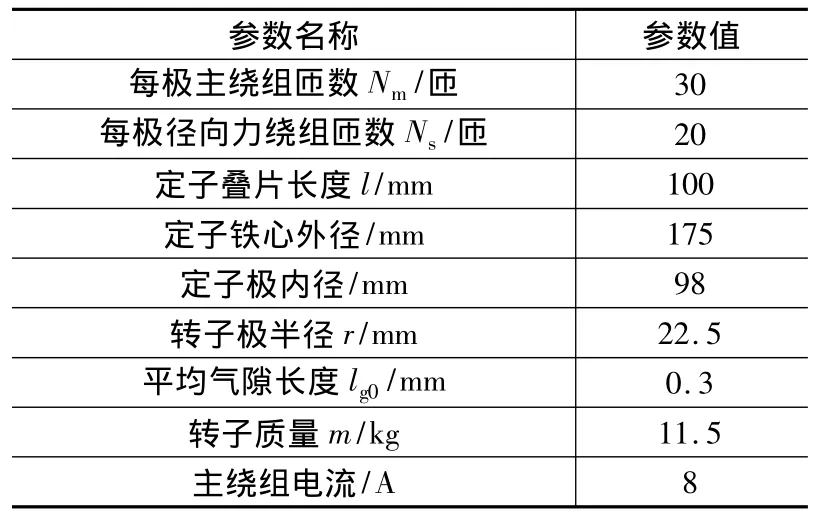
表1 电动机参数
2 径向位置解耦控制器
2.1 反馈线性化解耦
电机在高速运行时,易于采用平均转矩控制,为了方便起见,在主绕组中通以方波电流计算平均转矩,所以在单独分析BSRM的径向悬浮时,可以把主绕组电流ima当成常数,电机转子在β方向受重力。
根据动力学原理,可得转子的运动方程如下:

选取状态变量:

输入变量:

输出变量:

因此可得出系统状态方程和输出方程分别为:应用反馈线性化方法对其进行解耦。令:
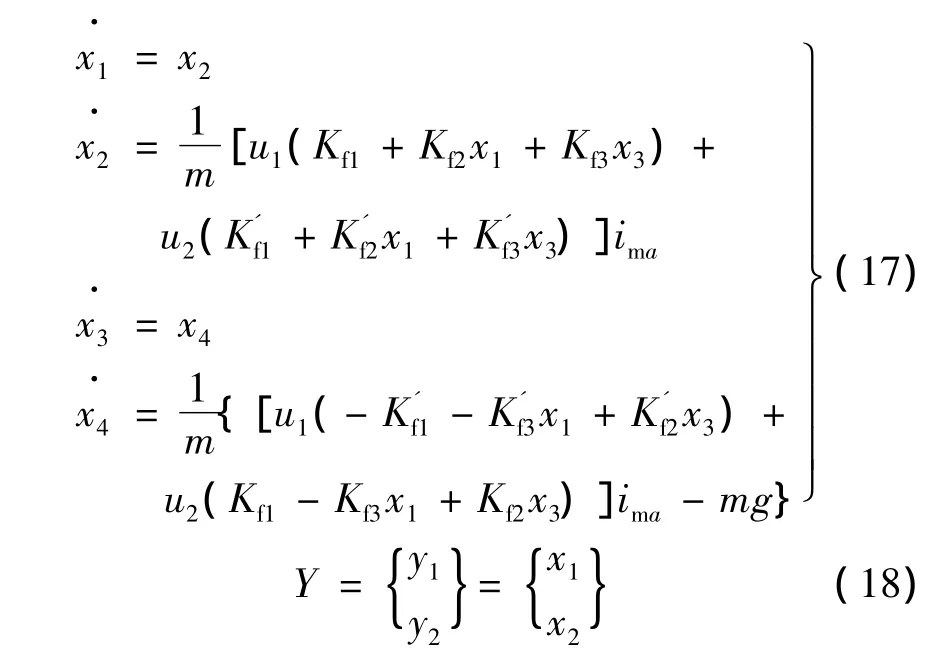
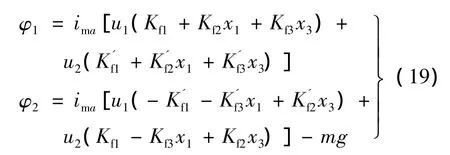
求解式(19),得:
式中:

由式(20)所描述的状态反馈关系,原系统可演化为下式所描述的无耦合线性系统:
2.2 控制器设计
结合本文开关磁阻电动机模型的式(1)、式(2)和图2中各个系数的波形,可以看出系数Kf1和对悬浮力的影响较大,而其余四个系数均与位移做了乘积,因此它们的影响较小,相比较之下,系数Kf2、比 Kf3、大很多,因此,通过对六个悬浮力系数的分析,考虑以下三种控制器。
(1)只考虑Kf1和;
(2)只考虑 Kf1、Kf2、和;
(3)六个系数全部考虑。
由式(22)可以看出,BSRM转子径向位移系统经反馈线性化解耦后,BSRM转子径向位移系统,变成2个无耦合的独立线性子系统,因此这里的控制对象变成一个单输入单输出的线性二阶系统[5]。在解耦控制过程中分别采用三种参数的控制器进行控制,控制系统原理图如图3所示。
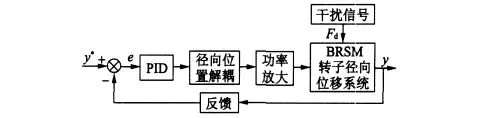
图3 控制系统框图
图中,y*和y分别表示径向位移的给定和输出,e表示误差,e=y*-y,Fd表示径向力外力干扰。
3 仿真结果及分析
图4为径向α方向受到扰动时的解耦仿真图,图4a、图4b、图4c分别采用三种参数的控制器,从电磁力和径向位移两方面对三种控制器进行了比较。

从图4可以看出,当α方向受到外力干扰偏离中心位置时,经过三种参数的控制器解耦后,β方向的电磁力和位移都几乎不受影响,其中六个参数的控制器解耦效果最好,而采用两个参数和四个参数的控制器解耦效果很相似,几乎没有差别。从图中还可以看出,尽管两个参数的控制器解耦效果没有六个参数的好,但它的数量级已达到10-8,所以完全达到了解耦,因此,控制器可以采用两个参数的,不仅解耦效果达到了要求,而且控制简单。
4 结 语
本文首先对无轴承开关磁阻电动机模型中的六个悬浮力系数进行了详细的分析,通过逐步忽略四个影响较小的系数,设计了三种控制器来对无轴承开关磁阻电动机进行径向解耦,最后通过仿真结果的比较,证明了采用两个参数的控制器不仅可以达到解耦要求,而且控制过程简单,比较适用。
[1]Takemoto M,Suzuki H,Chiba A,et al.Improved analysis of a bearingless switched reluctance motor[J].IEEE Transactions on Industry Application,2001,37(1):26 -34.
[2]邓智泉,杨钢,张媛,等.一种新型的无轴承开关磁阻电机数学模型[J].中国电机工程学报,2005,25(9):139 -146.
[3]刘羡飞,孙玉坤,王德明,等.磁悬浮开关磁阻电机径向位置解耦及仿真研究[J].系统仿真学报,2007,19(7):1527 -1530.
[4]Takemotor M,Chiba A,Fukao T.A New Control Method of Bearingless Switched Reluctance Motors Using Square-wave Currents[C]//Proc.IEEE Power Engineering Society Winter Meeting,2000:375-378.
[5]刘羡飞,孙玉坤,王德明,等.磁悬浮开关磁阻电动机径向位置解耦及变结构控制[J].农业机械学报,2007,38(9):147-150.
[6]孙玉坤,吴建兵,项倩雯.基于有限元法的磁悬浮开关磁阻电机数学模型[J].中国电机工程学报,2007,27(12):33-40.
[7]王秋蓉.无轴承开关磁阻电机的分析与设计[D].北京交通大学,2007.
[8]赵楠.磁浮开关磁阻电机悬浮控制技术研究[D].北京交通大学,2007.
