EPS用永磁同步电动机转子位置传感器的一种新型设计
2011-06-19刘莉莉周中坚
郑 虎,刘莉莉,周中坚,唐 文
(1.上海汽车集团股份有限公司,上海201206;2.中国电子科技集团公司第二十一研究所,上海200233;3.上海联盛汽车电子有限公司,上海201206)
0 引 言
随着电动转向(EPS)的快速发展,转向用电机从早期的直流有刷结构向无刷结构转变。目前广泛使用的有异步电机、无刷直流电机和永磁同步电动机。永磁同步电动机由于具有效率高、功率密度大、体积小、控制性能好等诸多优势,在EPS系统中得到了越来越广泛的应用。在目前市场上主流转向器厂家如采埃孚(ZFLS)、天合(TRW)、德尔福(Delphi)和捷太格特(Jtekt)等的EPS产品中,永磁同步电动机得到了广泛应用,且多采用表面磁铁式结构。
虽然工业控制技术对于无位置传感器永磁同步电动机没有太多的技术障碍,同时有学者对无位置传感器应用于 EPS进行了研究和报道[1-2]。但是为了减小扭矩波动、提高EPS安全性和可靠性,目前EPS电机仍较多采用有位置传感器电机[1]。常见的转子位置传感器有光电编码器、旋转变压器和霍尔(Hall)传感器[3]。
光电编码器虽然分辨率高,处理电路简单,但是不适用于高温环境,不耐振动冲击[3]。EPS电机工作环境温度宽,一般为 -40℃ ~75℃,最高可达125℃,且汽车存在较严重振动冲击,故光电编码器不适宜应用于EPS电机进行位置检测。
旋转变压器虽然耐振动冲击,可用于高温环境,但是结构复杂,处理电路复杂,温度特性差[3]。在EPS电机中,目前仅有日本捷太格特(Jtekt)的产品中采用。其他如德国采埃孚(ZFLS)公司、美国天合(TRW)公司、美国德尔福(Delphi)的EPS中,电机都采用Hall传感器。
Hall传感器由于其可靠性高,成本相对低廉,适宜于在恶劣条件下工作(低温-40℃,高温125℃),输出方波(脉冲)易于被控制器处理等优势,在汽车中得到了广泛应用,同样在EPS电机中得到了广泛应用。
本文根据EPS系统对电机的特性要求,针对当前EPS电机控制对提高位置传感器分辨率的要求,提出了一种基于双Hall的新型转子位置传感器,以解决电机矢量控制的需要。
1 EPS系统对电机的需求
图1是典型的EPS系统对电机的功率要求,虽然不同型式的EPS对电机的功率要求不同,但是曲线形状和趋势是相同的。由图1可见,EPS电机具有以下特点:(1)电机工作转速范围宽,从0~2 800 r/min;(2)电机在较宽的转速范围内要求保持接近恒力矩输出(如0~1 050 r/min),且转矩较大,图1的扭矩在1 050 r/min时达到5.2 N·m。(3)电机在高转速时保持一定的扭矩输出,如图1中的在1 750 r/min和2 800 r/min时,此时电机力矩分别为3.3 N·m和1.6 N·m。由于汽车能提供的电源电压有限,在不增加直流升压器以及尽可能减小电机体积和重量的前提下,仅仅依靠电机本体,无法满足在如此大转速范围内提供相应扭矩要求,只有通过控制器弱磁控制来满足电机在1 050 r/min之后的性能需要。
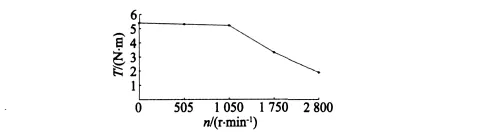
图1 齿条力8.5 kN的P-EPS电机转矩-转速曲线
图2 是采用表面磁铁式永磁同步电动机控制原理框图[2]。控制器根据来自系统的其它信息确定电机需要为系统提供助力,计算出直轴电流Id和交轴电流Iq的大小。在经过dq-abc变换(也即ejθr变换)后,通过逆变器向电机供电。定子三相电流检测值 ia、ib和 ic经过 abc - dq 变换(也即 e-jθr变换)后,与目标Id和Iq电流进行对比,从而进行目标电流修正和闭环控制。在这个矢量闭环控制过程中,转子转角的获得对系统的精度控制有重要影响[2]。
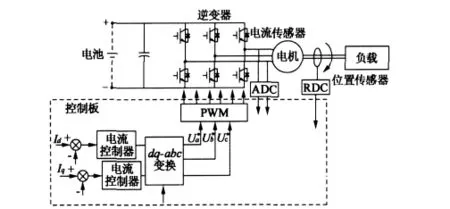
图2 电机矢量控制原理框图
在图1的转折点即转速n≤1 050 r/min以前,主要采用直轴电流为零的控制模式,即id=0控制模式,此时单位电流能产生最大的扭矩。在id=0控制中,要求电机电流向量I和电动势向量E同相位,也就是电流向量I只有交轴分量,没有直轴分量,这样单位定子电流才能获得最大的转矩[3],这要求较高精度的转子转角位置检测。
在图1的转速n>1 050 r/min后,电机采用弱磁控制。通过调节定子电流,增加定子直轴去磁电流分量[4],以达到削弱气隙磁场的目的。此时电机只能通过提高转速,以弥补磁场削弱带来的影响,维持电压平衡。电流向量I和电动势向量E不同的相位角,对弱磁效果有很大的影响,同样要求较高精度的转子转角位置检测。
2 Hall位置传感器的设计
2.1 传统转子位置传感器
传统电机设计了和电机相数相同的霍尔数量,以三相电机为例,安装3个霍尔。电机和反电势波形如图3所示,Hall a、Hall b和Hall c分别对应着反电势Eab、Ebc和Eca,它所示的分辨率只有60°电角度,显然不能满足矢量控制和控制精度要求。
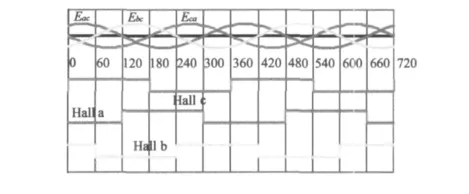
图3 传统永磁同步电动机Hall和反电势波形
为了提高转子角度分辨精度,有必要设计新型转子位置传感器,进一步提高转子电角度分辨率β。文献[5]设计了双Hall结构开关电路,将两个间距为1 mm的Hall集成在一起。通过合理设计感应磁环,能输出两路正交的Hall脉冲信号,提高转子分辨率。但是如果仅仅采用两路信号,尽管能提高转子位置分辨率,但是存在几个问题:一是两路Hall信号和反电势的对应关系如何确定?如何获知转子在任意时刻的绝对位置?二是磁环极对数如何设计?它和转子极对数的关系如何确立?
2.2 双Hall转子位置传感器设计
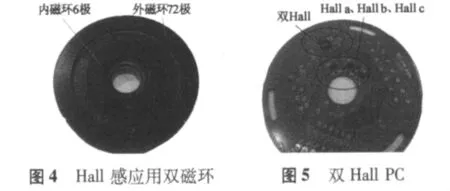
本文采用4个Hall设计以解决上述问题,具体是3个和相反电势对应的Hall和1个双Hall组成Hall PC电路进行转子位置检测,以提高转子位置传感器的精度。图4和图5是这种设计的具体实施,图4是应用于9槽/6极电机的Hall感应磁环,其中内环极数与电机数相等,为6极;外环为72极。图5是Hall PC板,采用1个双Hall和3个Hall。图6是这种Hall PC的输出波形,其中双Hall输出波形对应为Hall q1和Hall q2。
通过在原Hall a、b、c的基础上增加双 Hall,形成5个Hall信号,Hall q1和Hall q2正交,且Hall a、Hall b和Hall c的上升沿分别与Hall q1的上升沿对齐,通过Hall q1和Hall q2,把分辨率从60°提高到7.5°,提高了8 倍。
如果仅采用Hall q的输出,它提供的是转子相对位置,而不是绝对位置。通过和Hall a、b和c这三路和相反电势对应的信号一起,唯一地确定了转子绝对位置。
参照电机相邻槽间的电角度α计算式(1)[6],式(2)给出了转子分辨率β的计算方法。

式中:p为电机极对数;Q为定子槽数。
式中:pr为转子磁极对数;pq为磁环磁极对数,2为双Hall代表的2路Hall信号。
根据文献[5],Hall感应磁铁的极距为2 mm,由式(3)可以得出感应磁环外环中径为45.84 mm,双Hall也应布置在这个位置上。

在式(3)中,由于外环极数足够多,故可以近似认为2 mm的直线距离和弦距相等。
并不是所有的永磁同步电动机都能采用双Hall结构。双Hall的应用,需要遵循以下原则:
(1)感应磁环的外径限制。应用双Hall,需要保证感应磁铁的极距为2 mm。由式(3)可知,磁环的中径和感应磁环的极对数成正比,如果磁环极对数越大,则磁环外径越大,一旦超出了电机内部空间,那么这种方案是不可行的。
(2)需要确保Hall a、Hall b和Hall c的上升沿与Hall q1或Hall q2上升有恒定的对应关系,这样才能确定转子在任意时刻的绝对位置。能如上述的9槽/6极电机那样对应最好,在最差的情况下,至少需要保证有一个对应关系。即Hall a、Hall b和Hall c中的一个与Hall q1或Hall q2中的一个保持对应关系,这样才能唯一确定转子在任意时刻的绝对位置。这要求磁环极对数pq能整除转子磁极对数pr,而且由式(2)可知,ph/pr越大,分辨率越高。每360°电角度内,有pq/pr个Hall q的波形(脉冲)。
2.3 双 Hall应用拓展
实际中存在不能直接应用双Hall的情形,即图4和图5不能直接用于12槽/10极电机。其原因是外磁环极数72不能整除电机极数10,这样就不存在如应用原则(2)所述的对应关系。由双Hall应用原则(2)可知,需要采用的磁环极数为10的倍数;为了提高分辨率,极数至少为80。根据式(3),此时需要的磁环中径为(2×2×40)/π =50.93 mm,较45.83 mm明显增大,不能安装在电机内部,故而无法直接使用双Hall。针对这种情形,借鉴双Hall的应用原理,可以采用两个在空间上分布的Hall代替双Hall,此两个Hall在空间上的夹角γ按照下式计算。

两个Hall之间的圆周距离(弦距):

其中ζ表示圆周距离(弦距)。同时式(5)可以校验式(2)~式(4)的正确性。由式(4)可知,双Hall在空间的夹角为2.5°,代入式(5)可得 ζ为 0.999,约为1,与文献[5]的推荐值一致,这证明了以上公式的正确性。
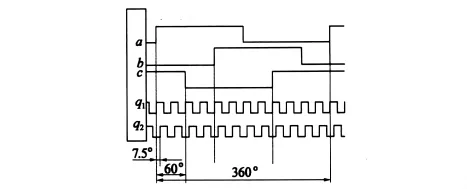
图6 Hall a、Hall b、Hall c和双 Hall输出波形
借用图4的Hall感应磁环,将外环充磁为80极,内环充磁为10极。Hall PC如图7所示,由式(4)可得Hall q1和Hall q2的空间夹角为2.25°,当然也可以采用 2.25°的整数倍,图7取的是22.5°。由式(2)可以得出其分辨率为11.25°电角度,Hall输出波形如图8所示。

图7 新型Hall PC

图8 新型Hall PC输出波形
3 电机测试结果
由文献[1]可知,采用双Hall位置传感器的精度能满足EPS系统对扭矩波动和平滑性的要求。图9是采用新型转子位置传感器永磁同步电动机和传统Hall传感器的测试结果比较。电机结构为12槽/10极,其中Hall PC感应磁环外环为80极,内环为10极。由测试结果可见,采用新型转子位置传感器的电机,在控制器的控制下,电机转速和扭矩得到了扩展和提高,完全能满足EPS系统对电机功率的要求。
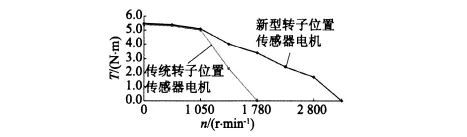
图9 不同转子位置传感器电机测试对比
4 结 语
本文针对当前EPS电机控制对提高位置传感器分辨率的需要,设计了一种基于双Hall的新型转子位置传感器。它虽然不像光电编码器那样有很高的精度,但是能满足工程需要,且成本低廉。针对双Hall实际情况,本文提出了应用原则和计算方法;并基于双Hall进行了应用拓展。
通过采用增加两路正交的Hall信号,提高了电机转子位置分辨率;通过采用5路Hall信号,可以确定转子绝对位置,为电机矢量控制、满足EPS系统要求提供帮助。实验证明这种方案是可行的。
提高转子位置分辨率,会提升电机控制效果。由本文提供计算转子分辨率的公式可知,通过增加外环磁极数和减少电机极对数均能有效地提高分辨率。但需要平衡电机本体设计限制、提高分辨率带来的性能提高和成本增加三者之间的关系。
[1]Liu G,Kurnia A.Position Sensor Error Analysis for EPS Motor Drive[C]//Electric Machines and Drives Conference.2003,1:249-254.
[2]中国汽车工程学会.世界汽车技术发展跟踪研究[M].北京:北京理工大学出版社,2008:35-69.
[3]寇宝泉,程树康.交流伺服电机及其控制[M].北京:机械工业出版社,2008.
[4]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2002.
[5]Allegro Microsystems Inc.3425 datasheet[EB/OL].http://www.allegromicro.com/datafile/3425.pdf,2001.
[6]许实章.电机学[M].第3版.北京:机械工业出版社,1995.