等离子体对翼型流动分离控制历程的PIV试验研究
2011-06-15王万波黄宗波王勋年沈志洪
黄 勇,王万波,黄宗波,张 鑫,王勋年,沈志洪
(中国空气动力研究与发展中心,四川 绵阳 621000)
等离子体对翼型流动分离控制历程的PIV试验研究
黄 勇,王万波,黄宗波,张 鑫,王勋年,沈志洪
(中国空气动力研究与发展中心,四川 绵阳 621000)
采用粒子图像测速 (Particle Image Velocimetry,PIV)技术,研究了介质阻挡放电等离子体激励对NACA0015翼型表面流动分离的控制特性及控制效果随时间历程的变化规律。结果表明,激励电压存在一个阈值,当电压小于阈值时,控制无效或效果不明显;当电压接近阈值时,控制表现出不稳定性并最终趋于稳定;当电压大于阈值时,控制效果稳定且显著,气流能够很好地重附在翼型表面。
介质阻挡放电;等离子体;流动控制;粒子图像测速仪;风洞试验
0 引 言
等离子体流动主动控制技术是一种新型流动主动控制技术,通过在飞行器翼面布置电极,在高电压激励下产生等离子体,能够有效控制飞行器翼面绕流边界层的分离,提高飞行器升阻比和失速迎角。该技术不需要活动的气动控制面,对飞行器的结构强度影响很小,并且具有控制响应快、控制位置灵活、可靠性高、成本低、能效比高等突出优点,因此具有很好的应用前景[1-5]。
文献[4]得出了激励电压存在一个阈值,当电压大于阈值时,可以实现气流的完全再附着;文献[6]利用PIV技术对EHD控制下NACA0015翼型绕流流场进行了测量;张攀峰等[7]通过风洞流动显示实验,研究了等离子体激励低速条件下对平板表面分离剪切层的控制特性;李应红等[8]利用烟流流动显示的方法得出在给定的流动分离状态下,等离子体激励的电压存在一个阈值;钟诚文等[9]利用PIV系统,在静止空气中,定量测量了等离子体激励器的诱导速度场,通过实验发现:在激励频率固定的情况下,诱导气流速度随着电压的升高逐渐增大。
目前国内外文献大多研究等离子体稳定后对气流的控制特性。本文通过PIV试验,从流场特性出发,研究了等离子体对气流分离控制特性随时间历程的变化规律。
1 试验原理和系统
1.1 等离子体流动控制基本原理
等离子体对翼型流动控制的原理如图1所示。在翼型表面布置电极,电极与高压电源相连,电极附近的空气在强电场作用下被电离,等离子体中的离子在空间不均匀电场的作用下,向电场梯度方向进行定向运动,离子在定向运动的过程中与环境空气分子碰撞,发生动量交换或对气流形成扰动,从而实现对翼型流动的控制。
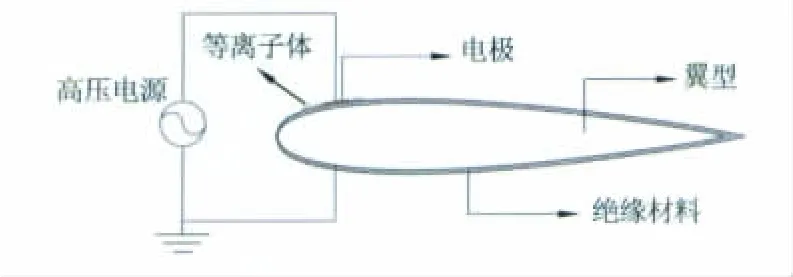
图1 等离子体对翼型流动控制布局示意图Fig.1 Plasma flow control on airfoil layout form
1.2 PIV测量系统
PIV试验原理如图2所示,PIV系统由激光器、CCD相机、同步器、发烟器、控制和分析软件、计算机等组成。
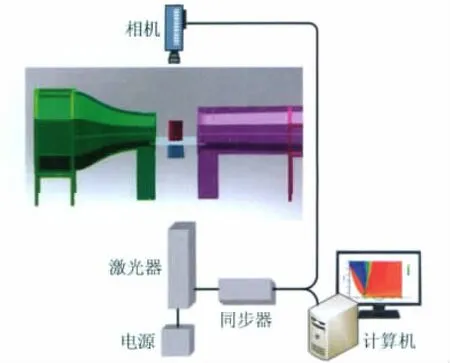
图2 PIV测量系统布局图Fig.2 Sketch map of the PIV system
激光器光源为脉冲式双Nd:Yag激光器,每个脉冲能量为120mJ,脉冲宽度为9ns,两激光器脉冲间隔可调整;相机为RS-170式互/自相关CCD,其分辨率为1024pixel×1024pixel,采集速度为30f/s;控制和分析软件为TSI公司的Insight 3.0;发烟器为ROSCO1700型粒子发生器,示踪粒子原料为橄榄油。
1.3 风洞
风洞为下吹式开口直流风洞,主要由收缩段、扩散段、驻室、风机等部分组成,风洞主体由玻璃钢制造,最高风速53m/s。试验段尺寸为:700mm×700mm×1050mm,风洞全长约11.5m。
1.4 电源
多相位电源主要由多相位信号发生器、SPWM正弦波调制器、多相位信号功率放大器和升压变压器等部分组成。输出电压有8个相位,每个相位相差45°。本次试验采用单相位,输出电压0~5kVrms连续可调,输出频率0.1~6kHz连续可调。
1.5 模型
试验翼型为NACA0015翼型,弦长100mm,展长480mm,材料为金属铝。在翼型表面粘贴聚酰亚胺胶带作为绝缘层,在胶带上面布置电极,模型如图3所示。

图3 布置等离子体激励器的试验模型Fig.3 Test airfoil with plasma actuator
2 试验结果和分析
电极位于翼型压力面前缘,电极宽度为2mm,电极中心线位于1%弦长处。来流风速为20m/s。
2.1 激励电压的影响
为研究激励电压对控制效果的影响,固定激励频率为3.0kHz,施加的激励电压分别为1.2、1.6、2.0、2.4、2.8、3.2、3.6和4.0kV。
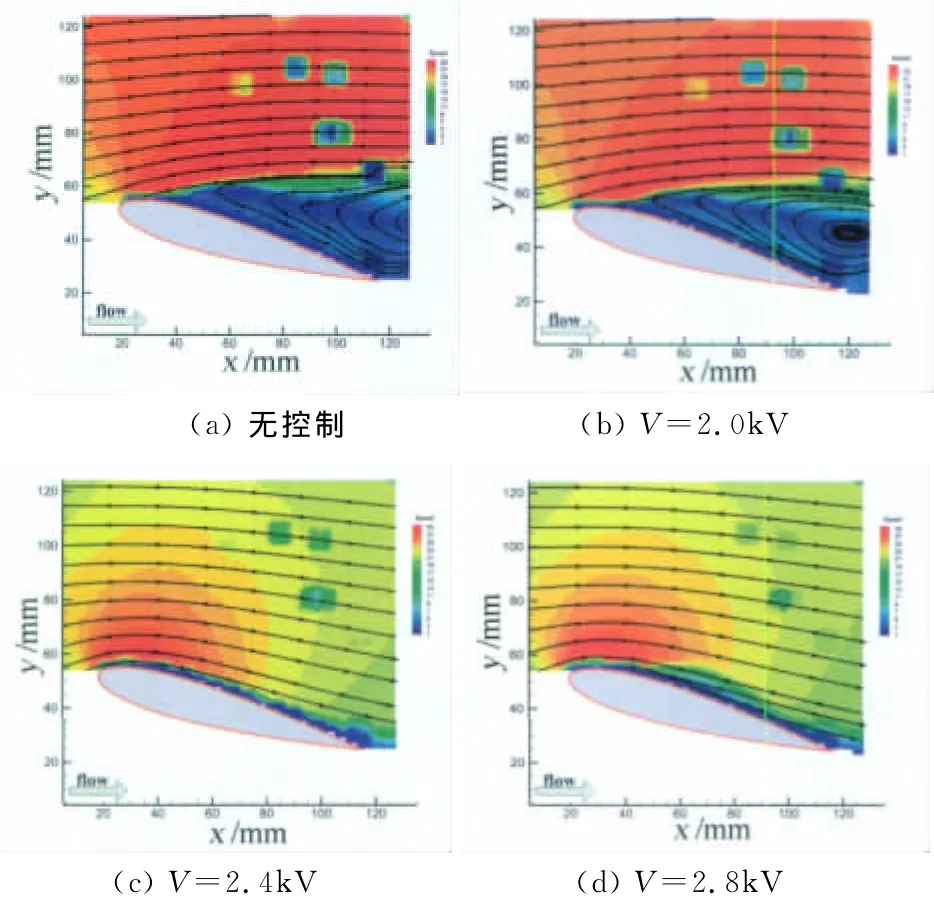
图4 α=16°不同电压控制下的速度流线图Fig.4 The results with different forcing voltages(α=16°)
当α=16°时,未加控制时翼型上表面出现大面积分离,如图4(a)所示;激励电压为1.2和1.6kV 时,分离不能得到有效抑制,基本上无控制效果;激励电压为2.0kV时,如图4(b)所示,涡心位置前移,但是分离区无明显减小;由图4(c)可知,激励电压为2.4kV时,流线基本重附在翼型表面,分离旋涡消失,分离得到有效抑制;激励电压进一步增大,当电压为2.8、3.2、3.6和4.0kV 时(激励电压为2.8kV 时的控制效果如图4(d)所示),控制效果与电压为2.4kV时的控制效果相当。由此可见,α=16°,激励频率为3.0kHz时,激励电压在2.4kV附近存在一个阈值,当电压小于阈值时,无控制效果或控制效果不明显;当电压大于阈值时,控制效果显著,电压继续增加,控制效果无进一步改善。
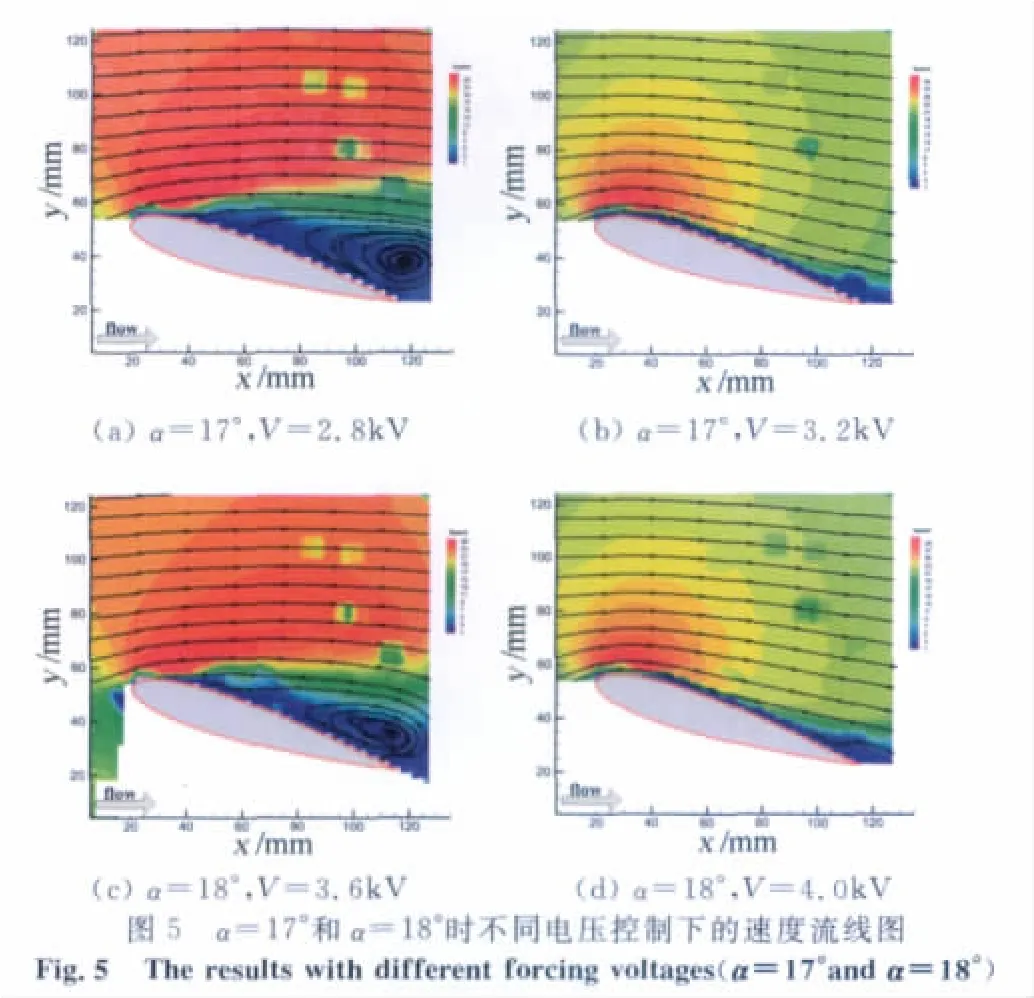
由图5可知,α=17°时电压阈值为3.2kV,α=18°时电压阈值为4.0kV,不同迎角电压阈值不同,迎角越大,气流分离越严重,需要的控制强度也越大,因此阈值也越高。
2.2 控制效果随时间历程变化特性
图6为α=16°,激励电压为2.4kV、激励频率为3.0kHz时,施加控制后流场随时间历程的变化特性。由图可知,施加控制的瞬间(t=1/15s),流线附着在翼型表面,气流基本上无分离。t=2/15s时,虽然大面积分离消失,但是翼型表面还有轻微的分离;t=7/15s、2/3s时,翼型出现大面积分离,分离未得到有效抑制;t=11/15s时,流线基本重附在翼型表面,分离得到有效抑制;t=7/5s时,翼型前缘分离得到抑制,分离区域减小,但在翼型后缘出现旋涡,分离未得到完全控制;t=28/15s时,翼型出现大面积分离,控制失效;t=29/15s、2s、31/15s时,流线附着在翼型表面,分离得到完全控制。施加等离子体激励后,控制首先经过一个不稳定的过程,然后达到稳定有效;α=16°,激励电压为2.4kV、激励频率为3.0kHz时,等离子体控制从施加到稳定有效,大约需要2s。
翼型前缘上表面(30.1,62.2mm)位置处(如图6(j)所示)的x向速度和y向速度随时间的变化如图7所示。由图可知,未施加控制时,x向速度在22m/s附近波动,施加控制后,x向速度有了显著的增加,在27m/s附近波动,经历大约2s后,基本维持在30m/s。x向速度随时间的变化与流线随时间变化规律一致,未加控制时,气流分离最严重,速度也最小;施加控制后速度经历一个不稳定的过程,大约2s后,维持在最大值附近。施加控制后y向速度有了显著的减小,变化规律与x向速度相似。
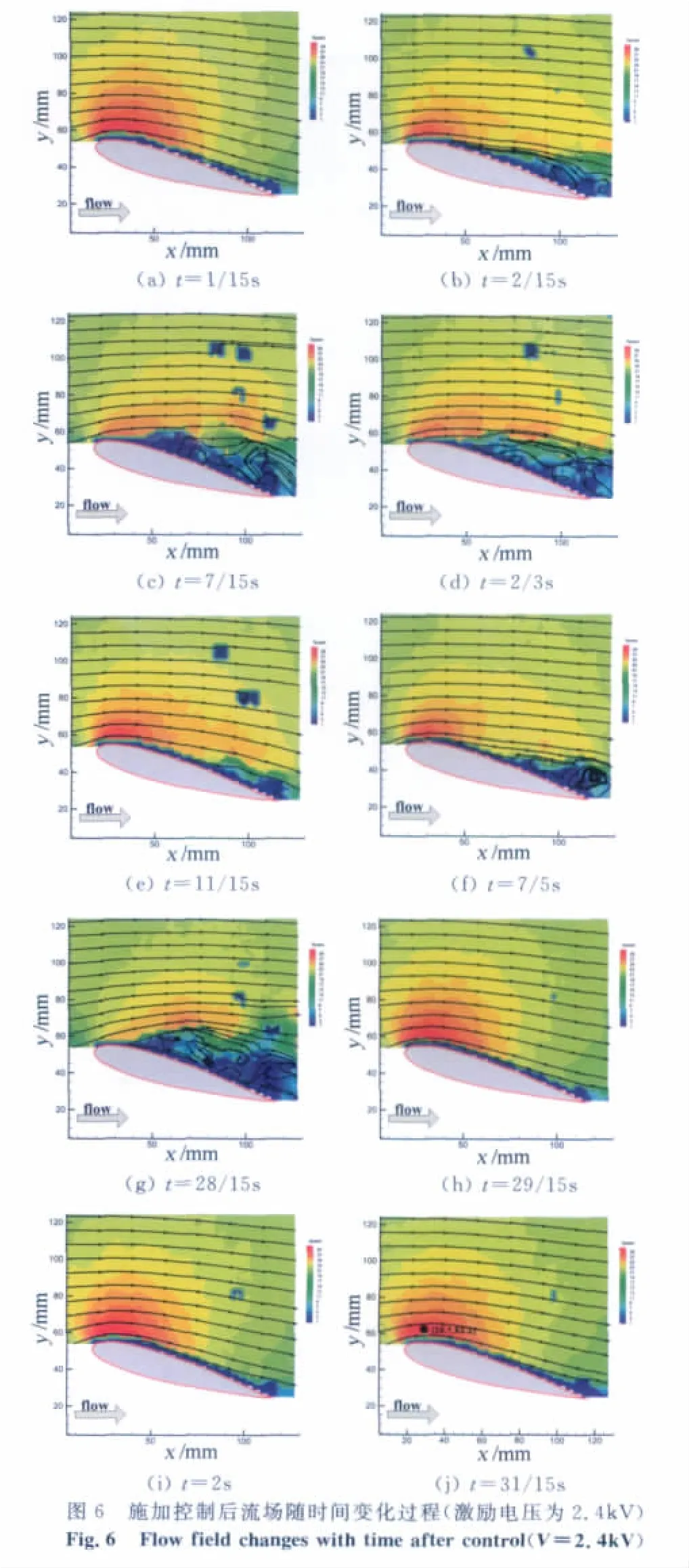
图8为α=16°,激励电压为2.8kV、激励频率为3.0kHz时,施加控制后流场随时间的变化过程。施加控制的瞬间(t=1/15s),翼型的大面积分离消失,流线基本重附在翼型表面,控制效果十分显著,控制过程中,未出现控制不稳定现象。
α=16°,激励电压为2.8kV、激励频率为3.0kHz时,翼型前缘上表面(30.1,62.2mm)位置处(如图6(j)所示)的x向速度和y向速度随时间的变化如图9所示。由图可知,施加控制后,x向速度基本维持在30m/s,y向速度基本维持在0.5m/s,随着时间的增加,速度未出现激励电压为2.4kV时那样大的波动。
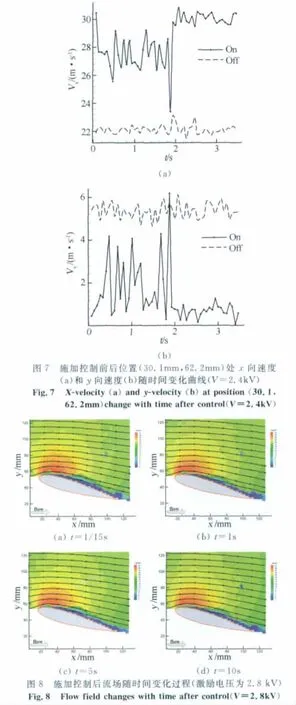
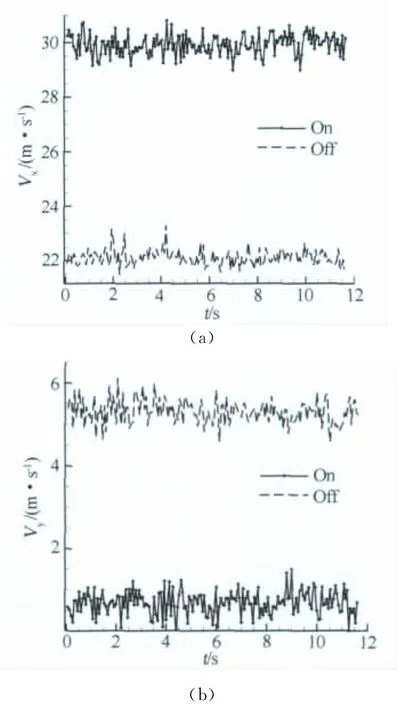
图9 施加控制前后位置(30.1,62.2mm)处x向速度(a)和y向速度(b)随时间变化曲线(V=2.8kV)Fig.9 X-velocity(a)and y-velocity(b)at position(30.1,62.2mm)change with time after control(V=2.8kV)
激励电压接近阈值时,施加控制的瞬间,等离子体的产生对气流产生一定的冲击作用,控制效果比较明显;等离子体产生后,在流场的非定常变化和离子迁移过程中,激励电压不足以把等离子体维持在一个稳定的状态,控制效果在一定时间内呈现出不稳定性;经过一段时间后,离子累积到一定密度,基本达到平衡,控制效果达到相对稳定的状态。当激励电压大于阈值时,等离子体一直维持在比较稳定的状态,施加控制的强度足够大,流动控制呈现稳定状态。激励电压越高,控制越稳定有效,消耗的功率也越大。
3 结 论
通过PIV试验,研究了来流风速为20m/s时,等离子体对翼型流动分离控制的特性。研究结果表明:激励电压存在一个阈值,不同迎角电压阈值不同,迎角越大,气流分离越严重,需要的控制强度也越大,因此阈值也越高。当电压小于阈值时,控制无效或效果不明显;当电压接近阈值时,控制表现出不稳定性并最终趋于稳定;当电压大于阈值时,控制效果稳定 有效,气流能够很好地重附在翼型表面。施加控制后,翼型前缘上表面x向速度显著增加,y向速度显著减小,减小了逆压梯度,实现了流动分离的有效控制。
[1]ROTH J R,SHERMAN D M,WILKINSON S P.Boundary layer flow control with a one atmosphere uniform glow discharge surface plasma[R].AIAA 1998-0328.
[2]CORKE T C,POST M L.Overview of plasma flow control:concepts,optimization,and applications[R].AIAA 2005-0563.
[3]PATEL M P,NG T T,CORKE T C.Plasma actuators for hingeless aerodynamic control of an unmanned air vehicle[R].AIAA 2006-3495.
[4]HE C,CORKE T C,PATEL M P.Plasma flaps and slats:an application of weakly ionized plasma actuators[J].Journal of Aircraft,2009,46(3):864-873
[5]GRUNDMANN S,FREY M,TROPEA C.Unmanned aerial vehicle(UAV)with plasma actuators for separation control[R].AIAA 2009-698.
[6]SOSA R,MOREAU E,TOUCHARD G,et al.Stall control at high angle of attack with periodically excited EHD actuators[R].AIAA 2004-2738.
[7]张攀峰,王晋军,施威毅,等.等离子体激励低速分离流动控制实验研究[J].实验流体力学,2007,21(2):35-39.
[8]李应红,吴云,张朴,等.等离子体激励抑制翼型失速分离的实验研究[J].空气动力学学报,2008,26(3):372-377.
[9]周小旭,钟诚文,李凯,等.等离子体EHD顺电加速效应影响因素实验研究[J].实验力学,2010,25(3):286-292.

黄 勇(1973-),男,四川德阳人,副研究员。研究方向:流动控制和动力模拟。通信地址:四川绵阳中国空气动力研究与发展中心(621000)。 联 系 电 话:0816-2461241。E-mail:dragonhy@163.com
PIV measurement on airfoil flow separation control course by plasma actuation
HUANG Yong,WANG Wan-bo,HUANG Zong-bo,ZHANG Xin,WANG Xun-nian,SHEN Zhi-hong
(China Aerodynamics Research and Development Center,Mianyang Sichuan 621000,China)
Particle Image Velocimetry(PIV)technology was applied to investigate the flow separation control around the NACA0015airfoil by dielectric barrier discharge(DBD)plasma actuator.The wind tunnel test was carried out to investigate the forcing voltage and the character of flow separation control effect changing with time.The results showed that there was threshold value of actuator voltage.When the voltage was lower than the threshold value,the control was effectless or the control was not visible.When the voltage was near the threshold value,the control effect was unsteady and finally went steady.When the voltage was higher than the threshold value,the control was prominent and steady and flow separation could reattach to the airfoil suction surface very well.
DBD;plasma;flow control;PIV;wind tunnel test
V211.73
A
1672-9897(2011)06-0023-05
2011-04-25;
2011-08-17
