弹性安装设备等效总激励力的计算方法研究
2011-06-07张继明彭伟才邵汉林
张继明 彭伟才 刘 彦 汪 浩 邵汉林
中国舰船研究设计中心,湖北武汉 430064
弹性安装设备等效总激励力的计算方法研究
张继明 彭伟才 刘 彦 汪 浩 邵汉林
中国舰船研究设计中心,湖北武汉 430064
针对弹性安装条件下多机脚设备总激励力估算繁琐的问题,提出一种设备等效激励力的计算方法。该方法将弹性安装的多机脚设备等效为只有一个机脚支撑的设备,将原有的多个隔振器简化为一个具有有效总阻抗的隔振器,利用原机脚隔振器上下端的响应与隔振器的有效总阻抗估算出的激励力,即可等效为该设备的总激励力。为验证该方法的准确性,利用该方法对某船用设备振动激励力进行估算。实验数据分析表明,在临界频率以内,可以忽略隔振器之间的耦合,估算值与实际测量值之间的误差小于5 dB,满足工程要求。
有效总阻抗;总激励力;隔振器;四端参数
1 引言
机械设备是船体结构振动的主要来源。为了能够准确了解船体的振动特性,迫切需要确定各种激励源,尤其是各种机械设备对机座的激励。然而,对于某些激励源来说,直接测得其激励是困难的,甚至是不可能的。因此,激励力的间接测量方法在工程实际中得到广泛重视。近年来,国内外在这个领域进行了大量研究。Desanghere和Snoeys[1]详述了激励力估算模态坐标变换法的理论基础、力识别的过程、求解的限制、噪声对动力响应的干扰等,并进行了实验研究,计算值与实测值的平均误差约为20%。Stevens[2]对激励力估算作了综述,将线性振动系统分为离散的和连续的系统识别,给出了3种典型激励力间接估算方法:
1)直接求逆法;
2)最小二乘法;
3)模态坐标变换技术。
其中,最小二乘法最受到推崇。Mark和Starkey[3]分析了模态模型力估算技术及其算法条件,对激励力的间接估算方法——模态坐标变化法提出了改进,证明了广义逆的特征向量以及其条件数与力估算精度有关。原春晖[4]针对激励力测量与估算,研究了基于隔振器阻抗特性和基座导纳特性两种设备激振力间接估算方法。
在工程应用中,对于弹性安装系统,常用的间接测量方法是通过测量隔振器上下端的响应与隔振器的四端参数来估算激励力[5]。对于一台具有多个机脚的设备,估算其总激励力就要测量每个机脚隔振器上下端的响应,估算出每个机脚的激励力。在测量隔振器上下端响应时,需要在每个隔振器上下端都布置传感器,测试工作量大,不利于工程应用。但是在低频范围内,由于设备的每个机脚的振动特性比较相似,因此,每个机脚的激励力也相似。这就可以对设备进行简化处理。
本文通过有效总阻抗的方法,将一台设备的多个隔振器简化为一个隔振器,将设备简化为只有一个支撑点并通过该隔振器与基座相连,进而为快速确定各台设备的总激励力提供了一种新方法。
2 基本原理
2.1 有效总阻抗的计算
安装在同一设备下的多个相同型号的隔振器之间,忽略隔振器之间的耦合,将其阻抗等效为一个隔振器的阻抗,该阻抗就称作这些隔振器的有效总阻抗。
对于每一个振动方向(如i方向),有效总阻抗是所研究的系统构件的复能量i与振动速度均方值(沿剖面周边)[]2之间的比例系数[6]:

按照定义,有效总阻抗可表示为:
式中,q˙i为 i方向的速度组成的向量;[Zi]为 m 个点i方向有关量组成的矩阵。
隔振器的有效总阻抗可以用4个单值阻抗来表示:
在隔振器型号相同的条件下,若忽略隔振器不同方向之间的耦合以及隔振器之间的传递耦合,则Zei11和Zei22的有效总阻抗可简化为:
对于Zei12和Zei21,简化后存在一个相位差φ,其有效总阻抗表达式简化为:
当在临界频率以内时,相位差φ对有效总阻抗的影响很小,可以忽略不计。从而,和简化为式(7)的形式。
假设一台设备通过m个相同隔振器与基座相连。在临界频率fc以内,隔振器各个方向间的耦合和隔振器之间的传递耦合可以忽略,则隔振器有效总阻抗矩阵中的元素即为单个隔振器阻抗矩阵中相应元素Zij乘以隔振器的个数m。
隔振器的有效总阻抗用矩阵表示为:

2.2 激励力的计算
我们所研究的振动系统如图1所示。

图1 设备、隔振器、基座系统Fig.1 System ofmachinery,isolator and seating
在单点接触的振动系统中,根据四端参数原理[7],可以写出隔振器上端受到的设备激励力F1以及隔振器下端作用于基座上的输出力F2,与隔振器上下端运动速度˙1、˙2,及隔振器阻抗特性 Zij之间的联系方程如下:

在多点接触的振动系统中,引入广义有效力的概念。
i方向的广义有效力可定义为[8]:

式中,Fi1、 Fi2、 q˙i1、 q˙i2表示 i方向由 m 个、、分别组成的向量。
将式(3)~式(6)代入式(13)、式(14)得:

因此,对于多点接触的振动系统,利用有效总阻抗,可以将系统的作用力简化为与单点接触振动系统一致的表达式。
在工程实际中,在临界频率以内(即频率不太高)的情况下,单台设备的每个机脚的振动特性比较相似,每个机脚的激励力也相似。因此,可以认为每个机脚的激励力幅值和相位近似相等。在此条件下,式(15)、式(16)中隔振器上下端速度的均方根值可以用单个隔振器上下端速度值代替。从而得到两种设备激励力的获得方法,如下所示:
1)用力环直接测量每个机脚下的激励力,通过测量每个隔振器上下端速度响应,按照式(13)、式(14)计算,作为设备的总激励力:

分别表示隔振器上下端的速度。
2)取一个隔振器上下端的速度响应,代替速度的均方根值,按照式(17)、式(18)计算等效隔振器上下端的总激励力,作为设备的等效总激励力:
在实验室条件下,式(17)中通过力环测量的隔振器上下端激励力可以认为是准确的,其值可以作为判断式(18)中计算值误差大小的参考值。
2.3 临界频率的计算
有效总阻抗方法有一定的适用范围。研究表明:在低频时,当隔振器间距小于半个弯曲波波长时,可将几个隔振器看成一个隔振器,此时所用隔振器刚度为各隔振器刚度之和;当隔振器间距大于半个弯曲波波长时,可认为隔振器之间是独立传递激励力而无传递耦合的,前提是基座为高阻尼的,使板中以行波为主而不形成驻波[9]。
实际工程中采用的基座很难满足其高阻尼要求,故本方法的适用范围是当隔振器间距小于半个弯曲波波长时。
设λR为基座面板弯曲波波长,L为隔振器之间最小间距(m),cR为基座弯曲波的传播速度(m/s),fc为临界频率(Hz)。 当 λR≥2L 时,有效总阻抗方法成立。
3 实验与结果分析
本实验所选用的基座为一般船用基座,设备的4个机脚通过BE-60型隔振器与基座相连。设备安装如图2所示。
本实验仅涉及隔振器输入端的阻抗参数和设备对隔振器上端的激励力。力环安装在机脚与隔振器之间,加速度传感器安装在靠近隔振器上下端的位置,测量设备运行状态下的振动数据。在基座响应较大处布置一个加速度传感器,作为相位参考点。
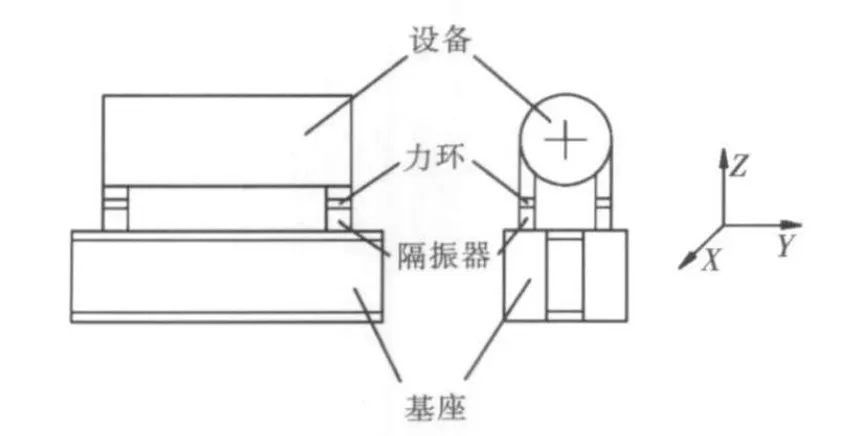
图2 设备安装示意图的正视图和侧视图Fig.2 The front view and side view ofmountingmachinery
按照2.1节中有效总阻抗的计算公式,求得4个隔振器输入端的Z向有效总阻抗如图3所示。

图3 输入端Z向有效总阻抗Fig.3 Effective total impedance of input-end in the Z-direction
按照2.2节中总激励力的两种获取方式得到两种结果的幅值如图4所示。
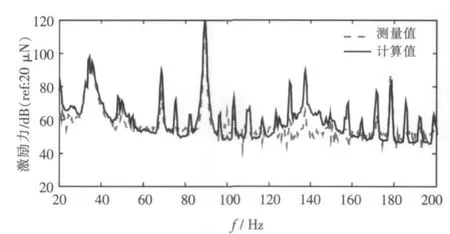
图4 设备Z向总激励力幅值对比Fig.4 Comparison ofmachinery total exciting force amplitudes in the Z-direction
图4中虚线表示力环与加速度传感器得到的测量值,实线表示有效总阻抗方法得到的计算值。由图示可知,在20 Hz以下频段内,由于信噪比过低,此时测量值误差偏大,两种方法的计算结果存在差异,但并不能说明有效总阻抗法的计算值不准确。在20~200 Hz频段内,两种方法的结果吻合较好,有效总阻抗法计算值误差不超过5 dB,满足工程要求。在200 Hz(超出临界频率)以上频段内,由于各个机脚的振动特性差异逐渐增大,隔振器的耦合作用逐渐加强,有效总阻抗方法的计算值误差逐渐增大,该方法将不再适用。这表明:在设备每个机脚的振动特性比较相似的条件下,在临界频率以内,将多个隔振器支撑的设备简化为由一个等效隔振器支撑的单机脚设备是切实可行的。
4 结 论
在设备各个机脚的振动特性比较相似的条件下,通过理论分析和实验验证,我们得到如下结论:
1)在小于临界频率fc的范围内,可以忽略隔振器之间的耦合,采用有效总阻抗的计算值与参考值吻合比较好。
2)在小于临界频率fc的范围内,多个隔振器上下端速度的均方根值可以采用某个隔振器上下端的速度来代替,且计算值与参考值吻合比较好。
根据研究所得结论,在工程实际中,如果设备各个机脚的振动特性相似,且在临界频率内,采用有效总阻抗法计算设备总激励力,隔振器上下端速度只需单个安装点的速度即可,最终将整个设备等效为单个机脚的设备。这样,一台设备只需两个加速度测点即可快速获得设备的总激励力,简化了测试工作量,缩短了测试时间,为激励力的实际工程估算奠定了理论基础。
[1] DESANGHERE G,SNOEYSR,Indirect identification of excitation forces by modal coordinates transformation[C]//Proc of 3rd IMAC, 1985: 685-690.
[2] STEVENSK K,Force identification problems-an overview[C]//Proceedings of the SEM Spring Conference on Experimental Mechanics,Houston,TX,June 14-19,1987:838-844.
[3] HANSEN M,STARKEY JM.On predicting and improving the condition of modal-model-Based indirect force measurement algorithms [C]//Proc of 8th IMAC,1990:115-120.
[4] 原春晖.机械设备振动源特性测试方法研究[D].武汉:华中科技大学,2006.
[5] 原春晖,朱显明,邵汉林,等.船舶机械振动源激励力的间接估算工程方法[J].中国舰船研究,2006,1(1):25-32.
YUAN C H,ZHU X M,SHAO H L,et al.Engineering approaches of the indirect force estimation on vibration sources ofmachinery in ships [J].Chinese Journal of Ship Research,2006,1(1):25-32.
[6] PERTTIH.Vibrational powermethods in control of sound and vibration [M].VTT Technical R esearch C entre of Finland, 2002.
[7] 沈建平,周璞.基于四端参数分析的隔振器传递阻抗测量方法[J].噪声与振动控制,2004,24(5):30-32.
SHEN J P,ZHOU P.Measurement method of transfer impedance for isolator based on four-end parameter analysis[J].Noise and Vibration Control,2004,24(5):30-32.
[8] PETERSSON B, PLUNT J.On effective nobilities in the prediction of structure-borne sound transmission between a source structure and a receiving structure, Part I: Theoretical background and basic experimental studies [J].Journal of Sound and Vibration,1982,82(4):517-529.
[9] PINNING R J.Vibration power transmission to a seating of a vibrating isolated motor[J].Journal of Sound and Vibration,1987,87(3):515-530.
Estimation Method on Equivalent Total Exciting Force of Flexible Mounting Machinery
Zhang Ji-ming PengWei-cai Liu Yan Wang Hao Shao Han-lin
China Ship Developmentand Design Center,Wuhan 430064,China
T o simplify the estimation of the total exciting force formachinery flexibilitymounted bymulti-feet, proposing an equivalent estimation method of exciting force.The flexible mounting machinery mounted bymulti-feet is equivalent to thatmounted by singlemachine foot.Then the velocity on the input-end and output-end, and effective total impedance of isolator are used to estimate the exciting force, namely the total exciting force.The proposed method is compared with the experimental results.The results show that the coupling effects between isolators can be ignored below the critical frequency and the error of proposed method is less than 5 dB.
effective total im pedance; total exciting force; isolator; four-poles parameter
U661.44
A
1673-3185(2011)06-54-04
10.3969/j.issn.1673-3185.2011.06.011
2011-03-30
张继明(1986-),男,硕士研究生。研究方向:船舶振动与噪声控制。E-mail:jimingzhangwld@163.com
彭伟才(1981-),男,博士,工程师。研究方向:船舶振动与噪声控制
张继明。
