舰艇单缆拖带安全与非线性运动特性试验研究
2011-06-05黄祥兵张纬康黄兴玲
黄祥兵,张纬康,黄兴玲
(海军工程大学船舶与动力学院,湖北武汉430033)
舰艇单缆拖带是援救事故舰艇的重要方式之一.在拖带过程中,由于参量的改变及环境的变化,单缆拖带舰艇易发生振转运动(围绕某个平衡拖带位置的鱼尾状摆动),此时拖带力要远大于位于“静止”拖带位置时的拖带力,这是导致缆绳突然断裂的重要原因.
单缆拖带舰艇的运动与单缆系泊舰艇的运动一样均具有强烈的非线性特征[1-3],风、浪、流及拖带速度、缆绳长度以及缆绳系缆点等因素小的改变可能导致完全不同的运动模式,而不同的运动模式将导致不同的拖带力水平,这也给舰艇拖带运动和拖带力的预报带来了不便.对于复杂海情下的拖带舰艇,运用仿真计算得到的结果与实际相差较大,因此,为保障拖船和被拖舰艇的安全,通过模型试验研究其运动特性及拖缆的受力问题,是十分必要的.
1 试验船模与试验场地
本试验是对某型船单缆拖带过程中的运动特性及缆绳受力情况的模拟分析.
船模除满足几何线形相似外,还采用了傅汝德相似准则,缆绳采用了材质相似.船模主尺度为:船长 4.1 m、船宽0.45 m、吃水0.12 m、排水量120 kg.
试验在华中科技大学交通学院拖曳水池中进行.在试验中测量船模运动的8个特征值:纵倾角、横倾角、航向角速度、横摇角速度、航向角、纵荡运动响应、垂荡运动响应、横荡运动响应.试验坐标系如图1所示.
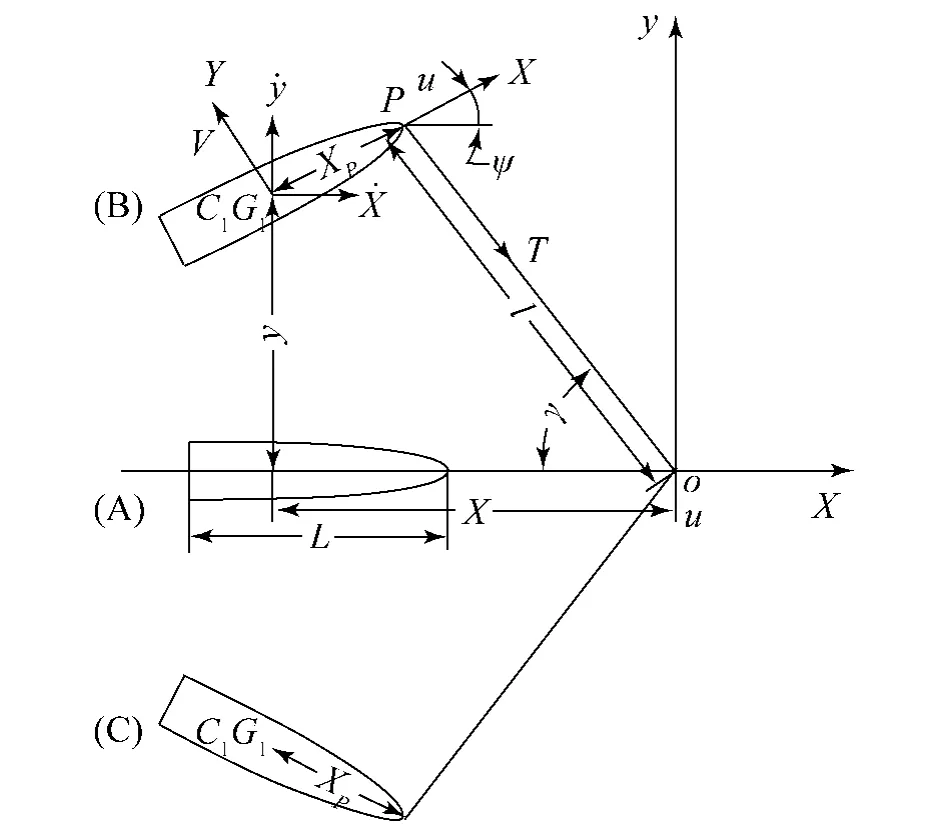
图1 坐标系示意Fig.1 Coordinate system of
在图1所示的坐标系中:Xp为拖缆点与拖带船重心之间的距离,u为拖带速度,Ψ为拖带船的偏向角,γ为缆绳与拖船的夹角,L为拖带船船长,l为缆绳长度,P为拖缆点位置,C1G1为拖带船重心位置.
2 单缆拖带模型试验
由于被拖舰船所受的水动力作用点位于舰船的重心之前,因此,舰船在拖带力以及水动力的联合作用下将偏离主航向,偏向角达到某一值时,缆绳绷紧产生一个回拽力,船舶在回拽力的作用下逐渐回到主航道方向.由于惯性的作用,船舶在回到主航道后将向另一方向偏转,如此反复形成振转运动(鱼尾运动).舰船的大幅振转运动是导致拖缆断裂的重要原因,因此,给出了静水及波浪拖带中舰船出现振转运动时的运动响应特征曲线.
2.1 静水中的拖带试验
图2给出了静水拖带条件下xp=0.45、lw=1.5 m、v=15 kn(xp为拖缆点位置的无因次量;lw为拖缆长度;v为拖带航速),单缆拖带船模的动力学响应.试验现象为:船模作规则的振转运动.
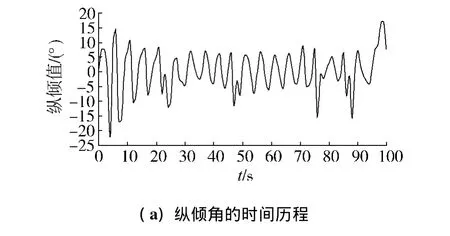
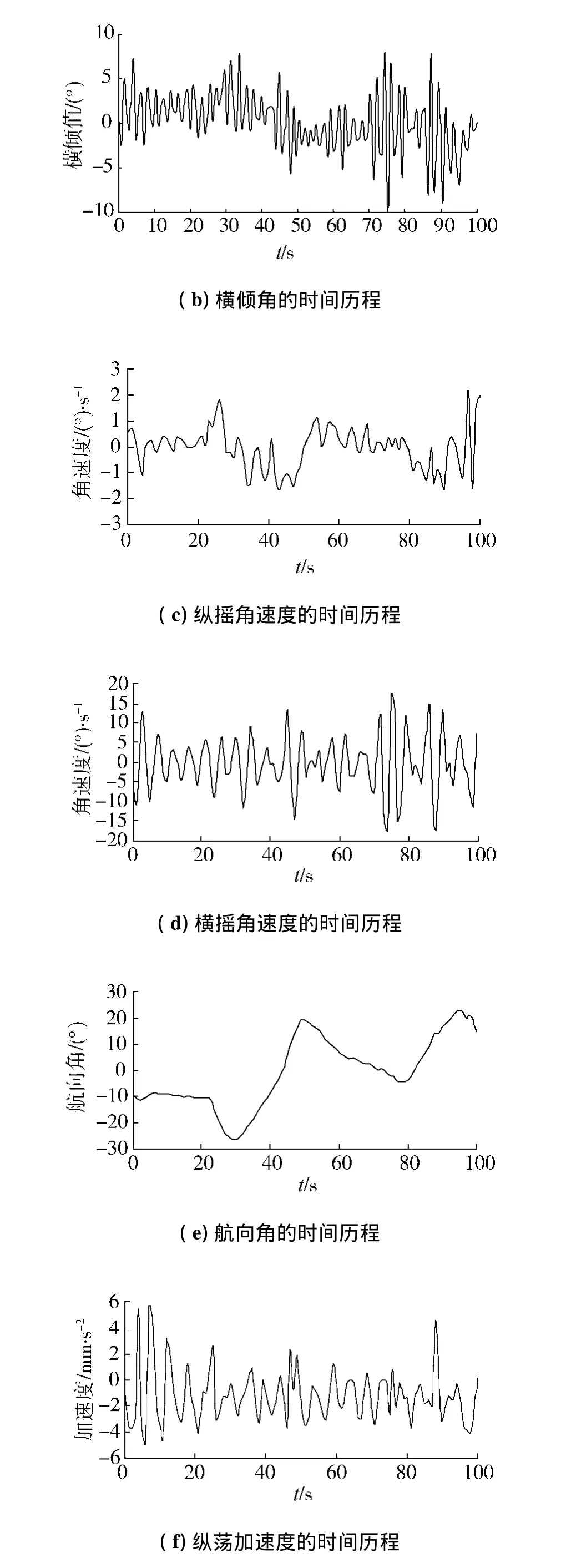
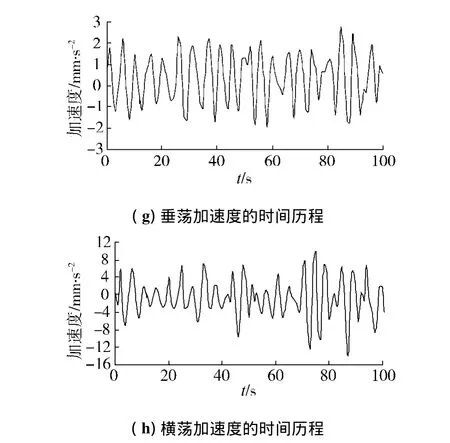
图2 静水中拖带试验Fig.2 Towing experiment in still water
2.2 波浪中舰艇的单缆拖带试验
图3 给出了拖带条件下 xp=0.50、lw=1.5 m、v=10 kn,波长4.5 m、波高50 mm,并且船模处于迎浪状态时的动力学响应.试验现象:船模作规则的振转运动.
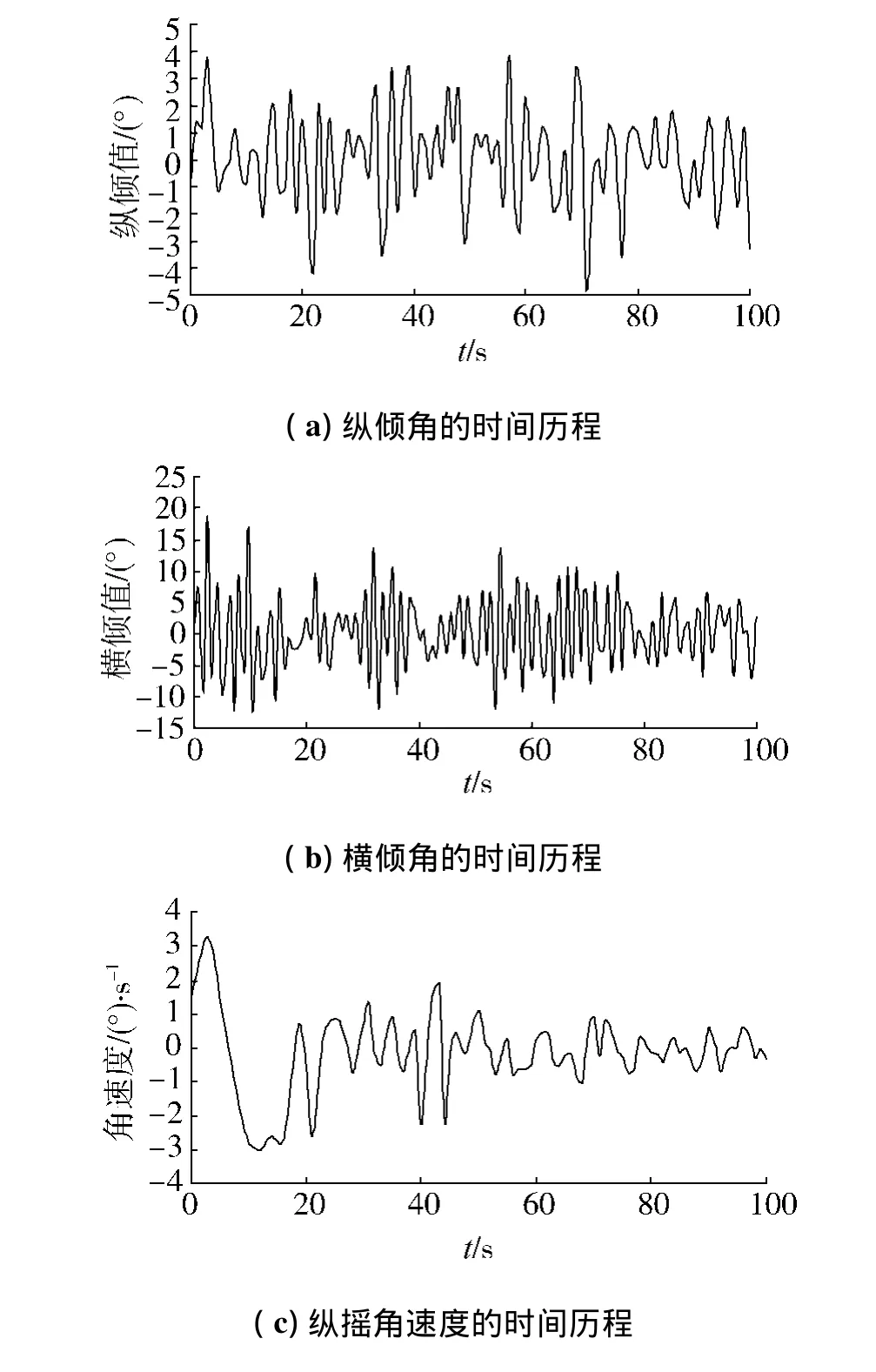
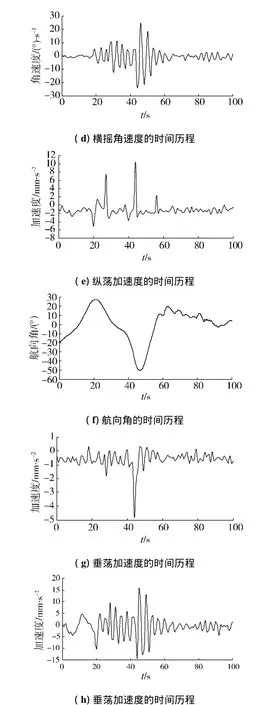
图3 波浪中的拖带试验Fig.3 Towing experiment in wave conditions
2.3 模型试验中船模的典型运动形式
模型试验中船模的典型运动形式如图4~6所示.

图4 船模在静水中的振转运动Fig.4 The motion of model in still water

图5 船模在迎浪状态中的振转运动Fig.5 The motion of model when wave against its direction

图6 船模在随浪状态中的振转运动Fig.6 The motion of model when wave in its direction
3 试验结果分析
试验中的各种动力学响应数据清楚的体现了舰艇拖带的非线性动力学特征,发现影响舰艇安全拖带的主要因素为:舰艇的运动模式、缆绳张力的变化、急牵倾侧力矩对稳性的影响等.
3.1 船模的4种稳定运动模式
船模无论是在静水还是在波浪中拖带,都观察到了船模的4种稳定运动模式,有波浪载荷作用下的拖带其运动规律呈现更强烈的非线性.不同的运动模式对峰值缆绳张力有着很大的影响.
模式1 在模型试验中发现,当拖带速度较低(约<5 kn)、拖带点距船首一定距离时,船模基本上是直线航行,只有一个平衡点(A),并且平衡点(A)是Liapunov意义下稳定的,此时拖带力很小.
模式2 平衡点(B)是Liapunov意义下渐近稳定的,因此船模将逐渐地趋近于这个稳定平衡位置,这也是实际拖带作业中经常出现的运动模式.当船模的运动为模式2时,其拖带点是稳定的,故船模会逐渐静止于稳定平衡点(B)或其镜像对称点(C)之处;此时拖带力较小,而且随着拖速的增加,系缆力的增长也不明显,但此时拖带力较模式1的情形有明显的增加.
模式3 (B)点或其镜像对称点已经失去稳定性,这时船模围绕着中心平衡点(A)作大幅值的鱼尾状摆动,这是因为随着拖速的增加,船模偏转至(B)点时,缆绳产生的瞬时回拽力足以使船模回到中心平衡点(A),并因惯性的作用偏离中心平衡点(A)向(B)点的镜像对称点运动,如此往复,缆绳张力也随之大幅增加.在模式3中还观察到船模在平衡位置(B)点或(C)点附近作一定幅值的振转运动.
模式4 在模式4中,船模在(A)点附近作较小幅值(约<30°)的剧烈摇摆,此时缆绳张力时紧时松,缆绳张力维持较高的水平.
3.2 缆绳的受力规律
各种拖带情况下,缆绳的受力情况如表1所示.表1中工况A1~A24、A30~A33为尼龙缆,A25~A29为锚链.试验现象:工况A1~A8为无周期运动,A9、A10、A15、A16 为偏周期运动,A11 ~ A14、A19~A33为周期运动,A17、A18分别为左偏、右偏周期运动.
1)从试验数据来看,单点拖带系统中缆绳的平均张力或持续张力是比较小的,影响拖带系统安全的是作用在缆绳上的瞬时冲击力.在拖带运动中尼龙缆所受的瞬时冲击力可达持续张力的1.5~4倍,锚链缆所受的冲击力可达持续张力的7~9倍,在试验过程中曾发生锚链断裂的情况.由于单点拖带系统是一种柔性体系,因此缆绳的弹性系数是系统抗击冲击力的关键因素之一.
2)从试验现象来看,在较低拖带速度下,缆绳的长度越短,被拖船在拖带过程中越容易产生鱼尾运动,因此缆绳的张力越大;在高速拖带条件下情况正好相反,缆绳越长,被拖船越易产生鱼尾运动.同样试验条件下,在实船实际航速低于10 kn的拖速下,1倍船长的缆绳张力约为2倍船长缆绳张力的2~2.5倍.在拖带环境许可的条件下,建议采用2倍船长左右的缆绳长度.
3)在试验过程中发现,拖带速度对被拖船的运动状态的影响是很大的.一般拖带速度越大,被拖船产生鱼尾运动的几率越大,并且产生的鱼尾运动越剧烈,因而拖带缆绳所受的张力越大.在拖带环境与时间允许的情况下,建议拖带以低于8 kn的航速航行.
4)迎浪中的缆绳力.由于被拖舰船的运动耦合了波浪中的纵摇运动、横摇运动和垂荡运动,缆绳受力比静水拖带显著增加.试验显示,迎浪中拖缆力比静水中增大2~7倍.
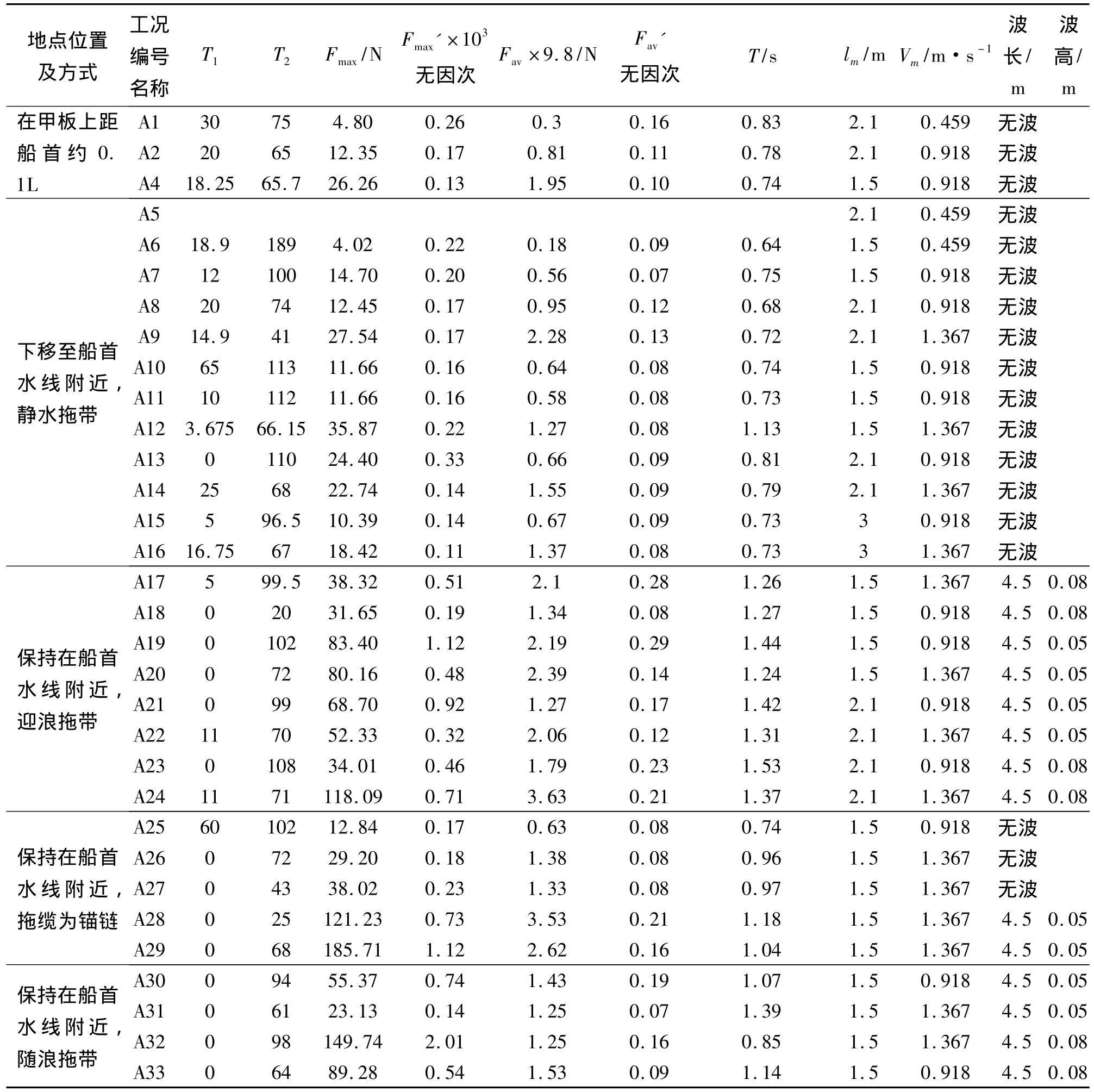
表1 各种拖带情况下的缆绳张力Table 1 Hawser tensions in different towing states
5)随浪中的运动和拖缆力
除了与迎浪一样,被拖船运动耦合了波浪引起的纵摇、横摇及垂荡运动,从而使缆绳力大大增加之外,还由于舰船在随浪及尾斜浪中运动时会产生其他的非线性运动.由舰船在随浪中的参数激振[4]及横甩运动[5]研究可知,当波浪与舰船的遭遇周期变化时,可产生各种不同的非线性运动.当波浪的遭遇频率是舰船自由横摇频率的2倍时,舰船会发生次谐波共振,产生强烈的横摇运动,波浪遭遇频率与舰船自由横摇频率相同时,会产生共振现象,也造成大倾角横摇.当船速和波速接近时,波长等于船长的1~2倍时,舰船会发生横甩现象,首摇角突然增大90°,拖缆上的拖力将产生突变,可能引起缆绳的断裂或使急牵横倾力矩大大增加,使舰船倾覆.总的来说,随浪中拖带时,其缆绳受力要大于迎浪中受力.
6)缆绳材料对缆绳力的影响.从试验中清楚看到,弹性较好的尼龙绳,在同样航速、同样拖带方式、同样波高的情况下,其缆绳力要较锚链小1倍左右,故正确选择缆绳的材料是安全拖带的重要手段.
7)拖缆点位置对缆绳力的影响.在试验过程中发现,拖缆点距重心越远,越容易发生振转运动.因此,在舰艇的拖带过程中,拖缆点距被拖船的重心近一点,拖缆的张力将小一些.
3.3 关于急牵倾侧力矩对稳性的影响
对于拖船和被拖船,船舶设计实用手册[6]对其稳性均有明确要求:Kt≥1;对于远洋航行舰船Kt按式(1)求得

式中:lq为最小倾覆力臂,m;lW为风压倾侧力臂,m;lt为拖缆急牵倾侧力臂,m.
根据本船主尺度和拖带情况,由手册计算lt:
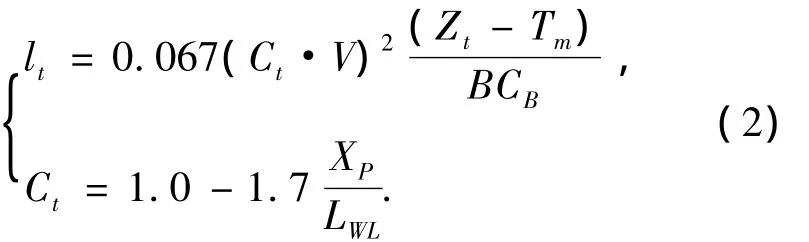
式中:Zt为拖钩固着点距基线高度,m;Ct为拖钩纵向位置修正系数,对大功率的船一般取0.75;XP为拖钩固着点与船舶重心间纵向距离,m;V为船的急牵速度,m/s;Tm为平均吃水,m.
由此可见,波浪中拖带时急牵倾侧力臂远大于按手册计算的数值,有时会引起舰船稳性不足.应该引起有关部门严重注意.
4 结论
通过模型试验,找到了船模的4种稳定运动模式,并探讨了拖带配系参数的改变对于船只动力学响应和系缆力的影响,如拖带方式、被拖船系缆点位置、系缆方式、缆绳质地选择、拖缆长度以及拖带速度等因素.被拖船系缆点位置越远离船的重心,船只越易出现振转运动;系缆点采取固定连接方式,较之移动连接方式船只更容易出现振转运动;锚链缆较之尼龙缆绳拖带的船只更易发生振转运动;船只在低速(约8 kn以下)情况下,缆绳越短越易出现振转运动,船只在高速(约8 kn以上)情况下,缆绳越长越易出现振转运动;拖带速度越大船只越易出现振转运动;在同等工况下,船只在波浪中更易出现振转运动,最危险的拖带工况是船只处于随浪状态.
拖带系统在波浪中运动的数学模型计算结果与模型试验的结果出入较大,其重要原因是:被拖船只在水平面内的振转运动具有强烈的非线性特征,而被拖船在波浪中的纵向运动及横摇运动具有强烈的非线性,在3个互相垂直平面内的非线性运动的合成运动,目前还很难处理,但试验结果是可信的.
[1]小保方準,佐佐木纪雄.一点係留時の船体振れまゎり運動とその安定性につぃて(第1報)[J].関西造船协会誌,1982(186):87-93.
[2]程贯一.海洋结构在流、浪作用下的非线性响应[J].舰船力学情报,1990(1):1-14.
[3]VIRGIN L N,BISHOP S R.Catchment regions of multiple dynamic responses in nonlinear problems of offshore mechanics[J].Journal of OMAE,1990(112):127-133.
[4]张竟,张纬康.舰船在波浪中的参数激振研究[J].中国造船,1992(2):18-28.
[5]陶醉.舰船在波浪中的横甩研究[D].武汉:海军工程大学,2004:1-125.TAO Zui.A research on ship broaching-to in waves[D].Wuhan:Naval University of Engineering,2004:1-125.
[6]罗思殿.船舶设计实用手册:总体分册[S].北京:中国船舶工业总公司,1998.
[7]蒋凯辉,康筱宁,连伟,等.GJB1119-91,防风系船水鼓[S].北京:国防科学技术工业委员会,1991.
[8]交通部第一航务工程勘察设计院.交通部第二航务工程勘察设计院.JTJ215-98,港口工程荷载规范[S].北京:中华人民共和国交通部,1999.
[9](美)奎恩(Quinn).海港工程设计和施工[M].刘宅仁,范加仑,译.北京:人民交通出版社,1980:1-55.
[10](美)P.布鲁恩.海港工程学[M].交通部一航局设计院,译.北京:人民交通出版社,1981:53-99.
[11]日本港湾协会.港口建筑物设计标准[M].北京:人民交通出版社,1979:1-730.
