深海原位激光拉曼光谱系统释样设计与海试
2011-06-05程凯侯华明李德平郭金家赵广涛郑荣儿
程凯,侯华明,李德平,郭金家,赵广涛,郑荣儿
(1.中国海洋大学 光学光电子青岛市重点实验室,山东 青岛 266100;2.中国海洋大学海底科学与探测技术教育部重点实验室,山东 青岛 266100)
深海化学成分原位探测对深海资源的开发具有非常重要的意义,深海环境的特殊性对发展海洋化学传感器提出了巨大的挑战.对于深海化学探测,许多成分脱离深海环境,其测量不再有意义,因此发展原位化学传感器就显得尤为必要.光谱类化学传感器可实现对深海目标物的原位、实时、连续、无接触测试,并且同时获得多种物质成分的信息,近年来成为深海原位探测化学传感器发展热点.拉曼光谱技术适用于海底热液喷口[1-2]、冷泉区[3-4]等极端环境下甲烷[2,5-7]、硫化物[3-4]的探测及孔隙水化学分析[8].美国Monterey Bay海洋研究所成功研制了深海激光拉曼光谱系统DORISS并致力于深海天然气水合物研究[5,9-10];Schmidt等人开发的拉曼光谱系统主要用于浅海水中多环芳烃的检测[6].Battaglia等人在实验室环境下利用硫酸根、硝酸根、碳酸根等离子模拟热液喷口特征,对拉曼光谱仪的检测能力进行了评估[1,3].在海洋仪器原位探测性能测试评价过程中,自带样品试验是重要的一环,对于将仪器推向实际应用是不可或缺的.该文旨在设计一套可承载释放相关液体物质的装置,用于模拟深海极端环境的化学场特征,以满足自主设计的深海原位激光拉曼光谱仪性能检测的需求.
1 释样系统设计
1.1 释样系统设计
深海原位激光拉曼光谱系统为自容式系统,系统独立运行,工作时间、光谱采集方式、光谱采集时间由试验前设置参数确定.释样装置独立于系统,由CTD单元控制海鸟采水器释放钩来触发样品的释放.设计方案如图1所示[11],实物图如图2所示.释样装置共包含5个样品释放器,主要由活塞、缸体、弹簧等组成.缸体内径63 mm,活塞行程100 mm,有效容积约为310 mL.释放器活塞运动由弹簧和钢丝绳双向控制,钢丝绳与海鸟采水器释放钩连接,在甲板可通过控制CTD释放采水器释放钩,活塞在弹簧拉力下运动,自带样品被排出,通过导管流向激光拉曼光谱系统探测窗口.为了防止样品的快速扩散,在系统窗口处设置了样品缓存装置,如图3所示.该装置为长400 mm、内径25 mm的腔体,窗口大小及位置与深海原位激光拉曼光谱系统窗口位置对应.由于缸体及活塞各方向均处于等压状态,因此不必考虑缸体耐压及高压密封问题,同时也确保了预罐装的液体样品在向深海运动的过程中不会发生泄漏损失[11].
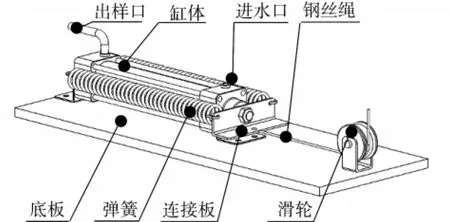
图1 单个样品释放装置结构图Fig.1 Structure of single sample release part

图2 深海原位激光拉曼光谱系统释样装置Fig.2 Sample release part of deep-ocean in-situ Raman spectroscopy system
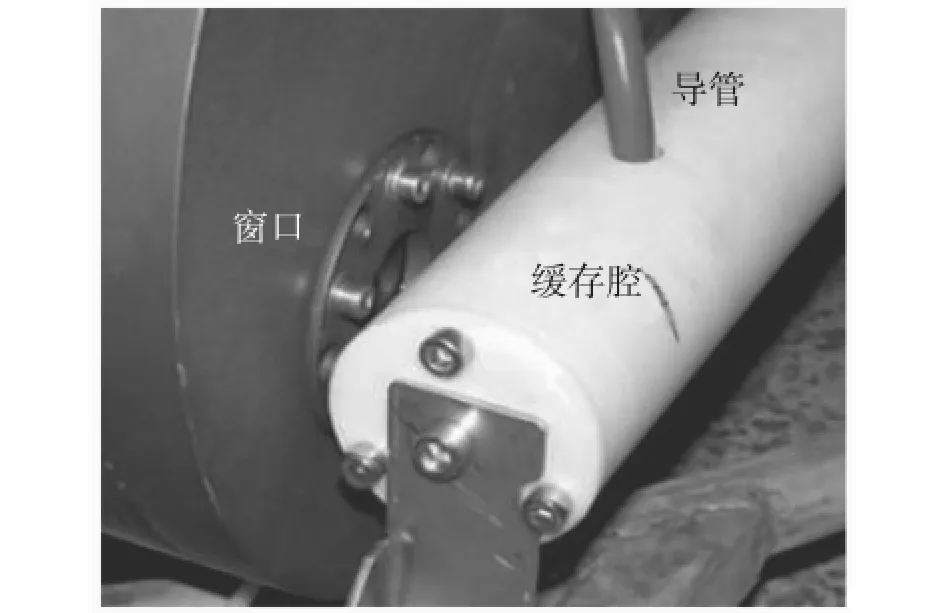
图3 样品缓存装置Fig.3 Sample buffer part
1.2 弹簧拉力及释样时间测试
每个样品释放器配备左右各1个弹簧为其提供释放时所需要的拉力.实验室环境下,用测力计拉伸钢丝绳得到:弹簧伸长150 mm时,拉力显示为102.9 N,根据胡克定律F=KX,得弹性系数K=686 N/m.
在此基础上,针对空气中不罐装液体样品释放、空气中罐装液体样品释放、水中罐装液体样品释放几种环境情况进行试验,用运动秒表测得其释样时间.
由表1可见,空气中不罐装液体样品释放所需时间最短,空气中罐装液体样品释放、水中罐装液体样品释放时间相差不大.深海时缸体、活塞亦处于等压状态,因此可以作为深海释样的时间依据.

表1 不同环境下释样所需时间Table 1 Duration under different conditions
2 释样系统设计评测方法
2.1 自带样品选择
在海洋环境中,SO2-4含量较高,HCO-3的含量在10-6量级,NO-3含量极低[12].海试目的就是模拟深海热液喷口等极端环境下的酸根离子,检验其拉曼谱;自带样品选择分别含有以上3种阴离子的盐Na2SO4、NaHCO3、KNO3,采用波长为 785 nm 的半导体激光器作为激发光源,其拉曼频移及峰位如表2所示.海水中SO2-4含量较高,在无样品释放时即可探测到,其浓度随着深度的变化而变化,其拉曼信号强度不能很好反演样品的扩散过程.在本文中,选取了NO-3的拉曼信号作为释样系统的评价.

表2 主要检测物质在激发波长为785 nm时对应的拉曼峰位Table 2 Raman shifts of the main interesting targets and peaks using 785 nm excitation
2.2 自带样品配制
为了保证在测试区域相对长的时间内有一个相对稳定的化学场分布,要求自带样品的浓度尽可能高,且处于4 000 m深海(温度0℃左右)时不得饱和结晶.结晶会吸附在缸壁上阻碍活塞运动,使样品无法释放至海水中.Na2SO4、NaHCO3、KNO30℃时在蒸馏水、海水中的溶解度存在较大差异,实验室测试数据如表3所示.
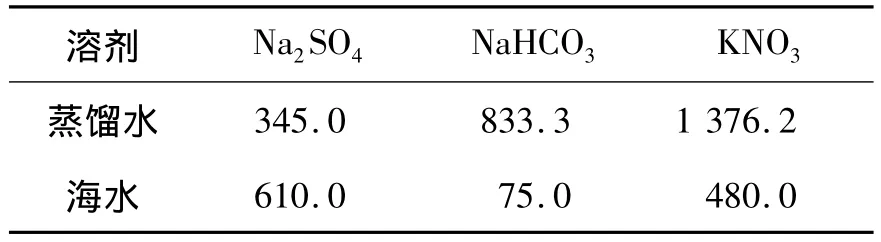
表3 主要检测物质在海水及蒸馏水中0℃时的溶解度Table 3 Main interesting targets'solubility in seawater and distilled water at 0℃
由表3可见,0℃时被检测物质在海水中与在蒸馏水中的溶解度相比,NaHCO3比KNO3减小幅度大,更易结晶析出;而Na2SO4溶解度增大,不会结晶析出.为了保证深海释样时样品能够顺利排出、接触到海水不会产生结晶且混合样品中 NaHCO3和KNO3仍具有较高浓度,试验中选择蒸馏水作为溶剂,按各样品0℃的饱和浓度配制.海试均未发现样品缸内有结晶现象.
2.3 样品罐装
样品预罐装步骤:
1)拆下出样口导管;
2)完全拉伸弹簧,并将弹簧末端钩挂于海鸟采水器释放钩上;
3)用注射器吸取液体样品,从出样口注入,直至注满;
4)重新安装好出样口导管.
2.4 释样装置与光谱探测系统联合工作方式
本部分从样品按照预定时间时序释放、深海原位激光拉曼光谱系统可连续获得自带释放样品的信号2个方面对释样系统的设计进行评测.系统下水前,事先在甲板操作控制释样系统动作,结果每个释样器均能按照规定的时序释放样品.系统在光谱采集工作完毕时,连续拍摄2张照片,从工作环境下拍摄的照片判断,样品释放器已完成预定动作.海试过程共进行了5次试验,试验相关参数如表4所示.系统光谱采集时间可控:系统到达预定深度时,通过甲板操作控制自带样品在光谱采集的特定时刻按特定的顺序释放.通过系统采集的光谱信号的强度、持续时间等信息对释样系统进行评测.试验过程中,尝试了不同释样间隔、释样量的样品释放方式.
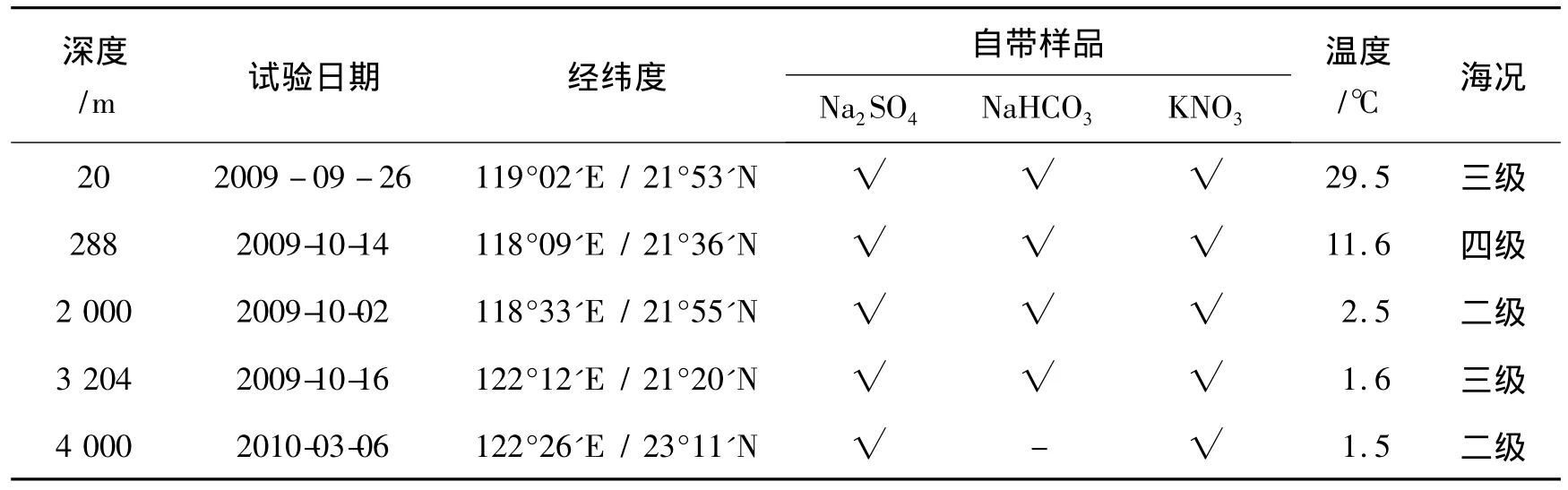
表4 深海原位激光拉曼光谱系统系统试验参数Table 4 Test parameters of deep-ocean in-situ Raman spectroscopy system
2.5 信号强度与样品浓度之间关系
在实验室环境下配制了不同浓度的Na2SO4、KNO3溶液.利用深海原位激光拉曼光谱系统分别测量了不同溶液中NO-3、SO2-4拉曼峰峰值强度,得到强度与浓度关系,如图4所示.2种物质的拉曼峰强度与浓度之间存在理想的线性关系,相关系数分别为0.987 6和0.999 8.这种线性说明强度变化趋势可以很好地反应浓度变化趋势.由图4可知,系统对NO-3和SO2-4的检测能力分别可以达到10 mmol/L和 15 mmol/L.

图4 实验室条件下光谱探测系统获得拉曼峰信号强度与浓度关系Fig.4 Relationship between intensity of Raman peaks and concentration obtained by Raman spectroscopy system in laboratory
3 结果与讨论
3.1 深海环境系统测试结果
深海环境下共试验2次,深度分别为2 000、3 204、4 000 m.其中在4 000 m环境下样品释放时测得的光谱如图5所示.图5释样方式为2个样品释放器依次动作,间隔5 s.SO2-4拉曼信号一直存在,随着样品的扩散,其峰强度有减小的趋势,SO2-4 拉曼峰中间的凹陷是CCD噪声所致;NO-3拉曼峰强度随着样品的扩散迅速减小直至消失,其浓度随着时间的变化如图6所示.与图5相比,NO-3信号变化趋势相似,但NO-3拉曼信号持续时间仅为70 s,约为288 m环境下信号持续时间的1/2.信号持续时间不同,表明释放样品的扩散速度不同,样品扩散速度可能受以下因素影响:
1)试验仪器相对水速度不同产生的影响.4 000 m试验处于黑潮流域,科考船受风力及海流影响,漂移速度达2 kn,仪器在船的牵引下运动;深海海流与浅海海流存在的差异也会影响仪器相对于水的速度,浅海测试受以上因素影响较小.
2)4 000 m环境下,活塞因受约40 MPa压力,体积缩小,与缸体间的摩檫力减小,导致样品以较快速度释放.
3)海水温度对样品扩散速度产生影响.因光谱采集设置的积分时间不同,激光器在不同环境温度条件下工作状态不同,不同工作深度获取光谱强度缺乏可比性.

图6 水深4 000 m,样品释放后拉曼光谱探测系统获得的NO3-拉曼峰强度变化Fig.6 The intensity tendency of NO3-Raman peak obtained by Raman spectroscopy system at 4 000 m depth
4 000 m深海环境获得自带样品的光谱及样品扩散过程浓度的变化趋势,充分说明了释样系统设计的可靠性及合理性.
3.2 样品扩散过程分析
样品释放后,由导管进入样品缓存装置.缓存装置有2个作用:
1)释放样品与海水混合后再扩散到深海原位激光拉曼光谱系统窗口;
2)限制样品扩散区域,延长光谱探测系统可获取自带样品拉曼光谱时间.
图7为3 204 m环境下光谱探测系统获取的样品释样过程中NO-3信号强度变化图.NO-3拉曼峰信号持续时间约130 s,与4 000 m环境下的70 s相比,原因可能为样品释放量不同.在4 000 m试验中,NO-3拉曼峰在样品释放后10 s内出现,最强峰值出现在20 s左右.信号强度达到峰值后,衰减过程持续时间较长,样品缓存装置可使深海原位激光拉曼光谱系统探测位置的自带样品浓度较长时间维持在可探测水平以上,作为辅助设备,可以很好地评价深海原位激光拉曼光谱系统深海环境物质的探测性能.
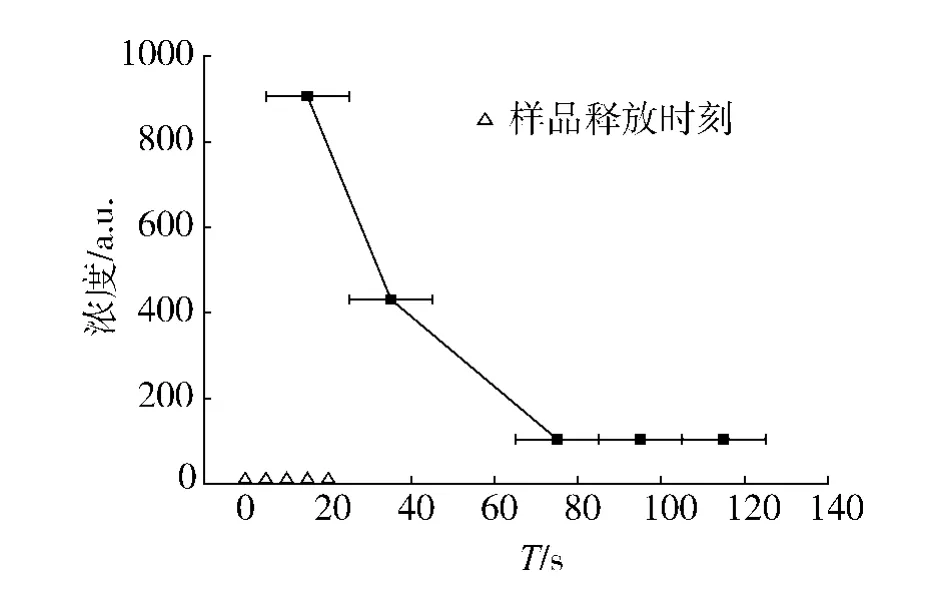
图7 样品释放后光谱探测系统获得的NO3-拉曼峰强度变化图,水深3 204 mFig.7 The intensity tendency of NO3-Raman peak obtained by Raman spectroscopy system at 3 204 m depth
4 结论
针对深海原位激光拉曼光谱系统与东方红2号船载设施,设计了可适用于深海环境下自带液体样品及释放装置,通过5次不同深度海洋环境试验,结论如下:
1)采用标准件形式的样品缸,针对实验室自主研发的深海原位激光拉曼光谱系统,设计了可适用于深海环境的标准样品释放装置,规避了深海环境携带样品必须考虑的高压密封难题,解决了高压环境下样品难以释放的问题.作为深海原位激光拉曼光谱系统的辅助设备,成功检验了其可靠性.
2)样品释放后,20 s左右探测到自带样品拉曼峰最高值.深海原位激光拉曼光谱系统持续探测到样品的时间为70~130 s不等,随着试验深度增加,持续时间减少.建立了样品释放量与NO-3信号强度变化的关系.
深海原位激光拉曼光谱系统为自容式设计,释样系统由人工在甲板上控制,造成光谱采集时序与释样时刻存在误差.下一步将完善自容式系统,对释样时刻实行精确地自动控制,实现无时差探测.同时针对深海环境下甲烷、二氧化碳、硫化氢等探测的需求,对气体释样装置进行设计.
[1]BATTAGLIA T M,DUNN E E,LILLEY M D,et al,Development of an in situ fiber optic Raman system to monitor hydrothermal vents[J].Analyst,2004,129:602-606.
[2]BREIER J A,ERMAN G C R,WHITES N.Mineral phase analysis of deep-sea hydrothermal particulates by a Raman spectroscopy expert algorithm:toward autonomous in situ experimentation and exploration[J].Geochem Geophys Geosyst,2009,10(5):1-12.
[3]DABLE B K,LOVE B A,BATTAGLIA T M,et al.Characterization and quantitation of a tertiary mixture of salts by raman spectroscopy in simulated hydrothermal vent fluid[J].Applied Spectroscopy,2006,60(7):773-780.
[4]WHITE S N.Laser Raman spectroscopy as a technique for identification of seafloor hydrothermal and cold seep minerals[J].Chemical Geology,2009,259:240-252.
[5]HESTER K C,WHITE S N,PELTZER E T ,et al.Raman spectroscopic measurements of synthetic gas hydrates in the ocean[J].Marine Chemistry,2006,98:304-314.
[6]SCHMIDT H,BICH H N,PFANNKUCHE J,et al.Detection of PAHs in seawater using surface-enhanced Raman scattering(SERS)[J].Mar Pollut Bull,2004,49(3):229-234.
[7]REHDER G,KIRBY S H,DURHAM W B,et al.Dissolution rates of pure methane hydrate and carbon-dioxide hydrate in undersaturated seawater at 1 000 m depth[J].Geochimica et Cosmochimica Acta,2004,68(2):285-292.
[8]ZHANG Xin,WALZ P M,KIRKWOOD W J,et al.Development and development of a deep-sea Raman probe for measurement of pore water geochemistry[J].Deep-sea Research Part I,2010,57:297-306.
[9]BREWER P G,PASTERIS J,MALBY G,et al.Laser Raman spectroscopy used to study the ocean at 3 600 m depth[J].EOS,Transactions,American Geophsical Union,2002,83(42):469-470.
[10]BREWER P G,MALBY G,PASTERIS J D,et al.Development of a laser Raman spectroscopy for deep-ocean science[J].Deep-sea Research Part I,2004,51:739-753.
[11]中国海洋大学.深海液体样品释放装置[P].中国:201010158408.3,2010.
[12]冯士筰,李凤歧,李少菁.海洋科学导论[M].北京:高等教育出版社,1999:112-113.