全球定位系统的抗干扰技术研究
2011-06-05齐志强
齐志强
(中国空空导弹研究院 河南 洛阳 471009)
自海湾战争以来,GPS开始被大规模应用于军事领域,GPS精确制导武器在战争中发挥的作用越来越大,GPS在定位、导航、授时、通信、指挥、控制、情报侦察、交通管制等领域的应用也日益广泛。美国甚至要求2000年之后美国国防部的飞机、舰船、战车和非直接火力武器系统必须装备GPS[1]。为了打破全球定位系统对美国的依赖,欧洲、俄罗斯和我国都在积极研发自己的全球定位系统,我国的北斗系统正在紧张的布局阶段,即将投入使用。然而,由于卫星信号太弱,GPS抗干扰能力弱成为其最大弱点,这成为GPS应用的瓶颈。如何提高GPS的抗干扰能力,成为了GPS能否发挥效用的关键。文中就常用的抗干扰措施的原理和实现方法进行了分析,这些方法虽然是针对GPS进行的研究,但同样适用于我国的北斗系统,可以直接进行移植。
1 GPS干扰来源和方法
GPS信号弱,其干扰来源可能是有意的也可能是无意的。从技术层面上可将干扰分为欺骗式干扰和压制式干扰。
欺骗式干扰指地面上或空中的发射机,发射与GPS卫星相同或相似,但强度更大些的信号,使GPS接收机误认为是卫星发来的信号,对其进行捕获和跟踪,从而扰乱接收机的正常工作使其无法正常定位或输出错误的定位信息。由于GPS卫星的军用信号是加密的,可抗欺骗干扰,要想对GPS军用信号进行欺骗干扰难度很大。
压制式干扰是指发射与GPS信号同频段的强干扰信号,把一定范围的GPS信号遮盖了。压制式干扰可能是故意的,也可能是非故意的,如电路板电磁兼容问题引起的辐射信号、调频广播电台或雷达信号的谐波引起。压制式干扰对军用和民用接收机都有效果,且实现简单,制作成本低,是军用接收机面临的主要威胁,也是目前抗干扰技术研究的主要方向。
2 GPS抗干扰的措施
卫星信号弱是造成GPS抗干扰能力弱的根本原因。卫星信号弱是因为卫星距地球表面太远,卫星发射功率不可能很大,而且国际电信联盟对导航卫星信号在地球表面的强度有限制。目前主要从发射端和接收端两个方面来解决GPS抗干扰能力弱的问题:增大卫星信号的功率和从接收机端提高抗干扰能力。
增大卫星信号功率主要包括3个方法:增大GPS卫星信号的发射功率、单独增加GPS军用信号功率和增加局部区域的信号功率。增大GPS卫星信号的发射功率的方法受限于供电和卫星造价,提高空间有限;单独增加GPS军用信号功率可减轻供电负担,但信号强度依然不够高;采用点波束天线可明显增加局部区域的信号强度,但其覆盖范围有限,控制复杂。增大卫星信号功率的3种方法对抗干扰能力的改善度如表1所示。
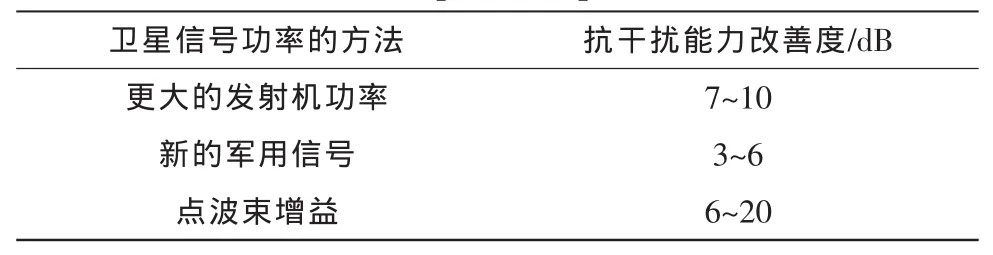
表1 增大卫星信号功率对抗干扰能力的改善度Tab.1 The improvement of anti-jam corresponding to the satellite power amplitude
增大GPS卫星信号功率的方法只能由美国实施和控制,对我们来说只能从接收机端提高抗干扰能力。从接收机端提高抗干扰能力是目前研究GPS抗干扰方法的主流技术,随着研究的日益深入,抗干扰方法也越来越多,我们将其大致分为3类:在GPS接收机中加入抗干扰,利用GPS天线实现抗干扰和GPS接收机综合抗干扰技术。下面将详细分析这些抗干扰技术的实现方法、应用背景及优缺点。
3 主流GPS抗干扰技术
3.1 在GPS接收机中加入抗干扰
在GPS接收机中加入的抗干扰技术大致分为3种:1)加长对接收信号的预检测积分时间;2)将GPS接收机与惯性测量单元相结合,在惯性测量单元(IMU)辅助下实现;3)对干扰信号做自适应滤波。
3.1.1 加长对接收信号的预检测积分时间
GPS接收机中,作相关处理之后的信号在送入码环之前要经过积分,叫做预检测积分或相干积分。加长相干积分时间有利于将接收机噪声的影响平均掉,从而使码环的跟踪门限降低,这就提高了接收机的灵敏度。对干扰来说,加长相干积分时间的效果是类似的,也有利于把干扰的影响平均掉,从而提高接收机的抗干扰能力。
这种方法实现起来比较简单,硬件不需要改动,只在接收机中调整软件参数即可,但这种方法降低了接收机的动态性能,不适合高动态用户的需要。
3.1.2 利用惯导辅助
利用惯性导航系统(INS)辅助GPS接收机可提高GPS接收机的抗干扰能力[2]。在设计GPS接收机载波和码跟踪环的带宽时,为提高接收机的抗干扰能力,应使他们的带宽尽可能的窄。然而卫星在高速运动,更多时候接收机平台也在运动,因此接收机所接收到的卫星信号多普勒和伪距在不断变化,这样GPS接收机的码环和载波环必须保持足够的带宽,以便跟踪卫星多普勒频率和伪距变化,否则会造成环路失锁。利用惯导辅助可以将惯导产生的位置和速度等信息反馈回GPS接收机的载波和码跟踪环中,软件将这些信息换算成GPS卫星信号的载波相位和伪随机码的基码数,用以辅助载波环和码环的跟踪。这就大大降低了信号变化对环路跟踪的要求,使之带宽缩窄,从而减少进入接收机环路的干扰功率,提高相关接收的处理增益,达到提高抗干扰能力的目的,此方法可将接收机抗干扰门限提高10~15 dB。
3.1.3 自适应滤波
自适应滤波器又叫频谱滤波器,有时域滤波和频域滤波两种实现方式,如图1、图2所示。
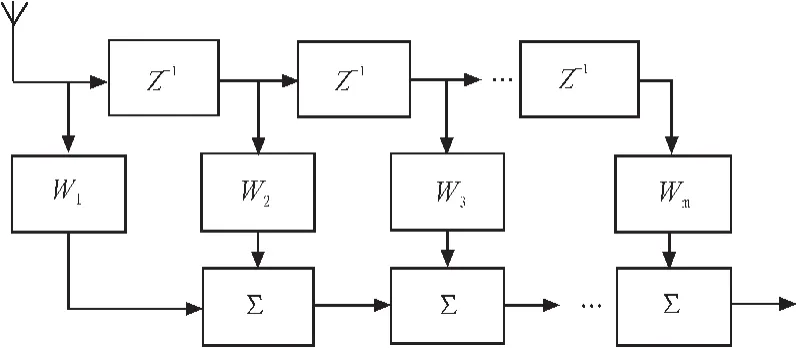
图1 时间域频谱滤波器Fig.1 Time-domain filter
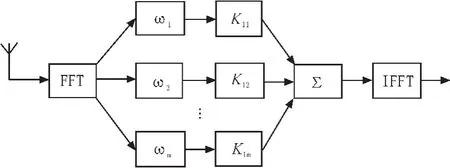
图2 频率域频谱滤波器Fig.2 Frequency-domain filter
时域滤波的核心是时域滤波器,它由多级抽头延迟线、加权系数相乘器及相加器组成。滤波器根据GPS信号特性构建智能算法模型,通过调整各路的加权系数来消除干扰。频域实现是先对输入信号做快速傅立叶变换(FFT),干扰信号变成背景白噪声上叠加的尖峰,通过数字处理的方法将尖峰处的增益降低,这样就消除了干扰,然后做反傅立叶变换(IFFT)将信号变回时域。
频谱滤波器对窄带信号具有很高的抑制度,试验数据表明,在干扰为连续波单频时,抑制度可达60 dB。频谱滤波器主要针对带宽有限的窄带干扰,该方法可消除多个干扰源的影响,但在消除每个干扰源时,那一小段内的GPS信号也受到影响,如果干扰源数目太多或干扰信号频谱较宽,则会在消除干扰的同时消除GPS信号,因此该方法只能消除数量有限的窄带干扰。
3.2 由GPS天线实现的抗干扰技术
3.2.1 干扰对消器和极化计
干扰对消器是利用GPS信号深埋在噪声中,干扰信号强于噪声的特点。干扰对消器是利用两副天线,其中一副天线接收干扰和信号,另一副天线只接收干扰信号。例如在飞机上,机身顶部和腹部各装一副天线,上面的天线接收信号和干扰,下面的天线只接收干扰信号。用复数加权的方法调整只接收干扰信号的权值,使其幅度与同时接收信号和干扰的天线幅度相等,两者相减即可实现干扰对消,如图3(左)所示。干扰对消用于消除单一干扰源是最有效的,当有多个干扰源时,由于各个干扰源对两副天线来说增益和到达时间均不相同,因此对一个干扰源合适的复数权值对另一个干扰源并不合适,也就无法消除干扰。
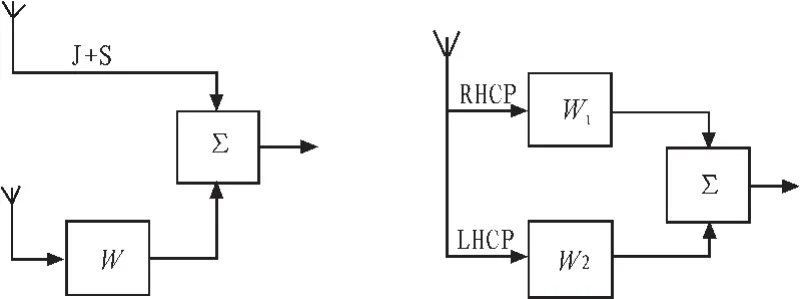
图3 干扰对消器和极化计Fig.3 Interference counteract and polarimeter
极化计是采用一副天线通过两个输出馈电单元送出,以形成有不同极化的两个输出通道,典型情况是一个右旋圆极化,另一个是左旋圆极化。由这两个馈电单元观测到的干扰是不相同的,两个通道输出的信号也不相同,利用这种差别便可以消除干扰的影响,如图3(右)所示。极化计和干扰对消器类似,也是固定一个权值为1,调整另一个权值使两路信号幅度相等,也只能消掉一个干扰源。
3.2.2 自适应调零天线
自适应调零天线也叫空间调零天线或可构形接收方向图天线(CRPA),是一种空域滤波技术,是提高GPS接收机抗干扰能力的重要手段,也是目前美军装备采用的主要的抗干扰技术[3]。这种天线自动产生对着干扰的方向图零陷点,干扰越强则零陷越深,以抵消干扰。
自适应调零天线工作原理类似干扰对消器,不过是由多个天线组成天线阵,可产生多个零陷,从而可以对抗多个干扰源,能够产生的最大零陷点数为阵元数N减去1。各路天线接收的信号经过复数加权后合成为一路信号输出,加权是以输出信号功率最小为准则计算各路信号权值,在总的天线阵的方向图中产生对着干扰源方向的零点,从而滤除干扰。其原理如图4所示。
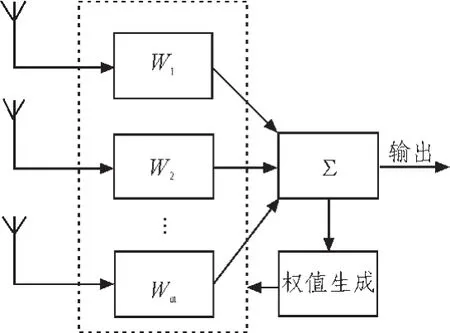
图4 自适应调零天线原理图Fig.4 Schematic diagram of adaptive nulling antenna
自适应调零天线可以做成一个与GPS接收机分离的设备,用以取代GPS接收机的普通天线,此时需要对加权输出信号进行D/A变换,然后上变频到GPS信号的射频功率。自适应调零天线也有其局限性:为了在方向图中不造成栅瓣,各阵元间距离必须大于等于λ/2,λ为GPS信号载波波长,这就使得天线阵不可能做的太小;不能区分宽带干扰还是窄带干扰,也不考虑卫星信号来向,当干扰与卫星信号来向比较接近时,干扰被消除的同时信号也被削弱。
3.2.3 波束形成天线
和自适应调零天线类似,波束形成天线也是采用天线阵的形式使加权输出最小,不过波束形成天线需要预先知道卫星信号来向,首先使天线波束定向对准所要跟踪的卫星,提高卫星信号增益,在此前提下使加权输出最小,以达到消除干扰的目的[4]。
波束形成天线和自适应调零天线的主要区别在于权值的计算方法不同,因为波束形成天线需要知道卫星信号来向,这就需要3个信息:天线所处的地理位置,天线姿态和卫星的位置。天线所处的地理位置可由外部输入,天线姿态可由惯导输入,卫星的位置可由历书算出,这就需要惯导辅助,位置输入和历书注入等。天线所处的位置和卫星位置也可由GPS接收机提供,不过这样的话接收机需要先在无干扰环境下正常定位。
虽然波束形成天线与自适应调零天线相比,由于可以预知卫星信号来向并可提高其增益,从而可以大大提高系统的抗干扰能力,但付出的代价也是巨大的。波束形成天线不但计算量大,而且与自适应调零天线相比,由于要保证卫星信号来向占用了一个自由度,从而使得在使用相同天线个数的情况下,波束形成天线能抗的干扰个数也减少一个,N阵元天线只能抗N-2个干扰源。波束形成天线与外界交联较多,需要专用的数字GPS接收机与之相配合,不像自适应调零天线可以做成与GPS接收机可以分离的设备;波束形成天线同样存在不易实现小体积的缺点,且价格昂贵,只适合用于比较贵重的平台。
3.3 GPS接收机综合抗干扰技术
每一种抗干扰技术的应用都有特定的要求和约束条件,没有一种抗干扰方法可适用于所有环境,因此综合利用数种抗干扰技术所带来的效果是一种抗干扰技术所达不到的。
3.3.1 空间-时域自适应处理
时域滤波器可以以低的成本抑制多个窄带干扰,而空间调零天线可以抑制所有类型的干扰,不过代价较高,如果将二者结合,先用时域滤波器抑制窄带干扰,再用自适应调零天线抑制余下的干扰,则会达到良好的抗干扰效果,这就是空间-时域自适应处理(STAP)[5]。
空-时二维自适应滤波抗干扰是现在比较流行的方法,处于研究前沿。空时二维处理的思想是将一维的空域滤波推广到时间与空间的二维域中,形成空时二维处理的结构,在高斯杂波背景加确知信号的模型下,根据似然比检测理论导出的一种空时二维处理自适应处理结构,称为“最优处理器”。
该算法的实现有两个关键步骤:协方差矩阵的产生和权值的产生。该方法是一种比较理想的算法,实现难度较大,这里要求协方差矩阵为一个复共轭矩阵,权值为一个非常敏感的复数列,如果协方差矩阵运算精度不足或稍有误差,都会导致权值产生剧烈波动。因此,几乎所有应用空-时联合滤波的算法都采用了一种逼近算法,即多级维纳嵌套滤波降秩算法(MSNWF)。
3.3.2 空间-频率自适应处理
将STAP中的自适应滤波器从时域改为在频域上实现时,便称作空间-频率自适应处理(SFAP)。对自适应滤波器而言,在频域上实现比在时域上实现时效率高一些,二者本质上是一样的,处理器结构如图5所示。

图5 空间—频率自适应处理Fig.5 Spatial frequency adaptive processing
3.3.3 自适应调零与波束形成结合
自适应调零天线与波束形成天线二者硬件平台比较接近,算法中很多模块可以共用,因此将二者结合代价较低。波束形成必须预先知道卫星的方位和俯仰,否则波束形成算法就无法实施,一旦实施了波束形成算法,就会形成针对某几颗卫星的波束指向,而在其他方向可能还有未跟踪上的卫星却被削弱从而无法捕获。
将自适应调零与波束形成结合,在不知道卫星的方位和俯仰时采用自适应调零算法,使接收机一开始工作就具有一定的抗干扰能力;当解算出卫星的方位和俯仰后采用波束形成算法,形成指向卫星的波束,从而提高接收信号的信噪比,进一步提高系统的抗干扰能力。如果GPS接收机有N个通道,可以安排波束指向N-1颗卫星,让剩余的一个通道输出对总的增益最大,并在该通道上继续捕获未跟踪上的卫星。
将自适应调零与波束形成结合,只需在波束形成硬件平台上对软件进行升级改造便可以大大提高系统的健壮性,弥补波束形成算法的一些缺点和不足,因此是波束形成算法工程应用的一个研究方向。该方法依然存在无法与GPS接收机分离,体积大,价格昂贵等缺点。
4 结束语
从本质上讲,所有从GPS接收机端采用的抗干扰技术都是用滤波的形式实现的,只是实现的方法和手段不同。有的是从缩窄滤波器带宽入手,有的是从时域、频域或空域滤波,也有的是几种方法的综合运用。各种方法都有其各自的优缺点和适用的对象和场合,在实际运用中我们要根据需要,灵活选取抗干扰实现方法,采用最低的代价达到预期的目的。本文所述的GPS抗干扰方法可以直接移植到我国自主研发的导航系统BD2上[6],因此对将来的北斗抗干扰应用也具有一定的参考价值。
[1]李跃,邱致和.导航与定位[M].第二版.北京:国防工业出版社,2008.
[2]岳亚洲,陆志东,张会锁,等.INS/GPS紧耦合系统自适应跟踪环路带宽设计[J].中国惯性技术学报,2008,16(4):458-461.YUE Ya-zhou,LU Zhi-dong,ZHANG Hui-suo,et al.Design of adaptive loop bandwidth in tightly coupled INS/GPS integration system[J].Journal of Chinese Intertial Technology,2008,16(4):458-461.
[3]党明杰.自适应调零天线技术在组合导航抗干扰中的应用[J].全球定位系统,2008,33(3):32-36.DANG Ming-jie.Application of adaptive nulling antenna in integrated guidance anti-jamming[J].GNSS World of China,2008,33(3):32-36.
[4]陈志军,许坚,韩政.GPS自适应天线阵在动态实时抗干扰中的应用研究[J].测绘信息与工程,2007,32(1):36-38.CHEN Zhi-jun,XU Jian,HAN Zheng.Real time dynamic anti-jamming of GPS adaptive antenna-array[J].Journal of Geomatics,2007,32(1):36-38.
[5]董李梅,幸璐璐.降秩的空时联合抗干扰技术分析[J].电訊技术,2009,49(1):72-76.DONG Li-mei,XING Lu-lu.Performace analysis of the reduced-rank space-time adaptive anti-jamming method[J].Telecommunication Engineering,2009,49(1):72-76.
[6]刘海波,吴德伟,董成喜,等.GPS抗干扰技术发展趋势[J].火力与指挥控制,2011,36(1):1-4.LIU Hai-bo,WU De-wei,DONG Cheng-xi,et al.Development trend of GPS anti-jamming technique[J].Fire Control and Command Control, 2011,36(1):1-4.