GPS/INS组合导航评价系统数据采集装置设计
2011-10-09张海宁罗继先
张海宁,罗继先
(西安工业大学 电子信息工程学院,陕西 西安 710032)
随着电子计算机技术特别是微机技术的迅猛发展和现代控制系统理论向实际运用的推进,以及导航系统的种类越来越多,将多种导航技术组合形成的组合导航技术开始迅速发展起来。组合导航系统是将航行体上的的导航设备组合成为一个整体,利用两种或两种以上的设备提供多重导航信息,并采用相应的数据融合技术构成一个多功能、高精度的冗余系统。其中全球定位系统(GPS)和惯性导航系统(INS)两者组合的导航系统是组合导航技术发展的一个重要方向。国外早在上世纪九十年代前后已经进行了相关的组合导航实验研究,并推广应用,目前美国绝大多数飞行器已经淘汰了单一GPS导航,采用深组合技术。而我国的北斗系统与INS的组合也是发展趋势,具有完全的自主性和重要的现实意义。
在组合导航技术快速发展的背景下,如何确保导航设备能够安全、可靠地运行,并实时监测导航设备的导航性能,成为一个至关重要的问题。考虑如上问题,文中介绍了基于LPC2292的组合导航评价验证系统的数据采集装置设计,该装置能够采集、处理各种导航设备信息,并通过串口传输到上位机,从而建立一个安全可靠,能够准确反应导航过程中的各项参数并进行校准,完成导航评价的监测系统。
1 系统总体设计
该评价验证系统将检测到的导航数据通过串口传送至处理器LPC2292进行预处理,并提取有效数据,然后将所有有效数据传送至PC机,由上位机通过软件对采集到的所有数据进行解析、处理。系统将GPS的导航数据作为真值,被测设备的导航数据作为测量值,进行对比验证,计算两者的误差,同时研究惯性导航组件的输出特性,从而给出已有系统的精确性和稳定性。
组合导航评价系统主要由PC机评价验证系统、数据采集系统、GPS导航、惯性导航设备、被测设备等组成。其组成框图如图1所示。
1)导航设备:提供3类导航信息:GPS导航信息(GPS定位、定向信息)、惯性导航信息(航向角、姿态、角速度、加速度等)、被测设备信息。其中,数字信号包括GPS信号,寻北信号、光纤陀螺信号、被测设备信号;模拟信号包括加速度计的电流信号,4~20 mA,倾角传感器的电压信号,-5~5 V。
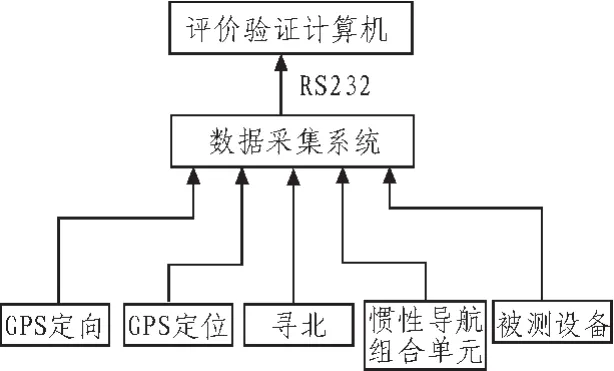
图1 系统组成框图Fig.1 Block diagram of system
2)数据采集装置:由于各种导航设备具有不同的接口和协议,所以数据采集装置完成多种接口的数据采集、协议转换、数据预处理等,将数据组帧通过串口传输到评价验证计算机(简称上位机)。
3)PC机评价验证系统:提供良好的人机界面,将接收来自数据采集装置(简称下位机)传输来的数据进行解析、后处理,并完成评价验证,最后建立相应的数据库系统。
2 系统硬件设计
系统的硬件设计包括:数据采集装置硬件设计与上位机评价验证系统硬件设计。上位机评价验证系统硬件只需一台可以通过串口接收数据的高配置PC机即可,所以本文的重点是数据采集装置的硬件设计。
数据采集装置的硬件组成分为4个单元:核心处理单元、串口扩展单元、A/D转换单元、电源电路。硬件组成结构图如图2所示。

图2 硬件组成结构图Fig.2 Block diagram of hardware
2.1 核心处理单元
核心处理单元包括:ARM7处理器LPC2292及外围电路。LPC2292微控制器是基于一个支持实时仿真和嵌入式跟踪的16/32位ARM7TDMI-S CPU。片内资源具有6 kB片内静态RAM和256 kB片内Flash程序存储器,2/4(LPC2292/LPC2294)个互连的 CAN接口,带有先进的验收滤波器;多个串行接口,包括 2个 UART(16C550)、高速I2C 接口(400 kbit/s)和2 个 SPI接口;8路10位 A/D转换器,转换时间低至 2.44 μs;多达 112个通用 I/O口(可承受 5 V电压);多达 9个边沿或电平触发的外部中断引脚;片内晶振频率范围:1~30 MHz。
2.2 串口扩展单元
通过对本数据采集装置进行接口分析发现,该装置需要完成多种接口的数据采集,其中包括数字量和模拟量,由于LPC2292只有2个串口,串口资源有限,考虑到系统的可靠性,采用总线方式扩展串口。目前比较通用的串口扩展方案有两种:软件实现和硬件实现。其中,软件实现是利用GPIO口软件模拟串口时序,但这种方法的不足在于采样次数低,占用大量的CPU时间,而且软件模拟一般不能实现高于4 800 bps的波特率,从而导致通信的实时性和可靠性很差;另一种方法是硬件实现:通常使用专用串口扩展芯片。目前市场上有很多种串口扩展芯片比较常用的是GM8123/25系列串口扩展芯片,该芯片有单通道和多通道两种模式,可以由一个母串口扩展最多5个串口,但是缺点在于:单通道模式不能满足串口数量要求,而多通道模式下,子串口工作波特率只能设置成统一值,不适用于各个串口工作不一致、又要求同时工作的系统。本文选用的TL16C554专用串口扩展芯片能避免上述不足,并有效解决了串口资源短缺的问题。TL16C554是一种具有串行异步通信接口的大规模集成电路芯片,可以实现数据的串/并、并/串转换功能。TL16C554内部包含了4个可独立操作的可编程异步收发单元16C550,它们共用了数据线D7~D0、内部寄存器地址线A2~A0、读写信号线IOR和IOW、DMA读写控制TXRDY和RXRDY、复位RESET、时钟XTL1和XTL2。每个收发单元都有自己的片选信号CS、中断请求INT、数据输出TX、数据输入RX等。一片TL16C554,可以扩展4个RS232口。采用2片TL16C554,可以扩展8个RS232,再加上LPC2292的2个UART,共10个RS232,可以满足本设计的需要。
设计中TL16C554数据线D7~D0接LPC2292的数据线,地址线A2~A0亦直接相接,采用74HC138译码器的8路输出作为两片TL16C554的端口片选信号,扩展电路如图3所示。
为了有效采集不同接口的导航数据,通过两片TL16C554扩展出8个串口,当某个串口中有数据输入时,会存入接收缓冲区,从而产生接收中断。基于能够使每个串口都响应中断这个目的,需要将每个芯片的INT脚相或,再和RXRDY信号相与,以确认是否是外部输入请求而导致的中断,排除异常中断的干扰。最终将两部分的信号相或,使得任一片芯片的任意端口都能产生中断,并能快速判断中断源,从而对中断请求作出处理,中断电路设计如图4所示。
2.3 A/D转换单元
核心处理器LPC2292本身带8路10位A/D转换器,考虑到精度问题,不考虑用内部A/D,而采用精度更高的外部A/D转换器。文中根据设计需要选用ADS7841转换芯片,ADS7841芯片是一个具有4通道、12位采样率的模数转换器。该芯片最多可输入4路模拟信号,4通道单端或2通道差分输入,8/12位串行输出,其最高采样频率为200 kHz,单电源2.7~5 V。
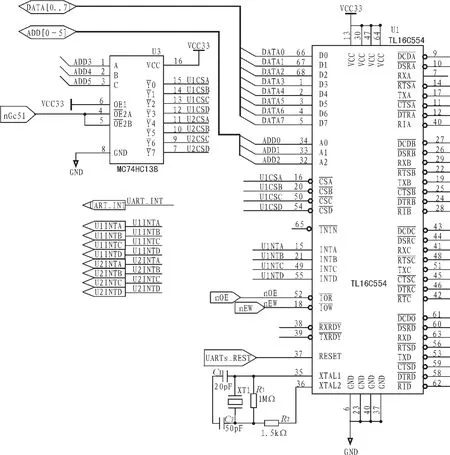
图3 串口扩展电路图Fig.3 Serial port expansion circuit

图4 中断电路原理图Fig.4 Schematic diagram of interrupt circuit
在导航设备中加速度计和倾角传感器输出的是模拟量,其中加速度计输出的是模拟电流量,所以需要通过电流采样进行I/V转换,将电流转换为电压后才能够A/D转换,I/V转换电路图如图5所示。在电路图中,4~20 mA变送信号经过150 Ω的采样电阻转换为0.6~3 V电压,之后经过偏置电路、同相比例放大电路和电压跟随器的作用,得到相应2.7~5 V范围内的电压信号,然后将转换后的电压信号AD1送入A/D转换器进行处理。
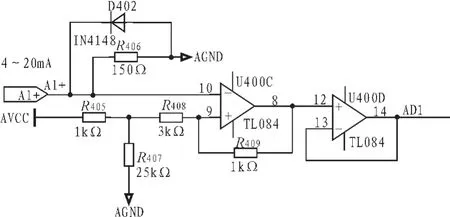
图5 I/V转换电路图Fig.5 I/V conversion circuit
其中,倾角传感器输出的是模拟电压信号:-5~5 V,而ADS7841芯片的工作电源范围为2.7~5 V,因此也需要经过相应的调理电路将输入的模拟电压信号进行电压偏移。-5~5 V范围的输入电压信号经过电阻分压、运算放大和比较器处理,得到所需范围的电压信号,电压调理电路如图6所示。
导航设备的模拟信号经过相应的调理电路后送入ADS7841芯片进行A/D转换,A/D转换电路图如图7所示。
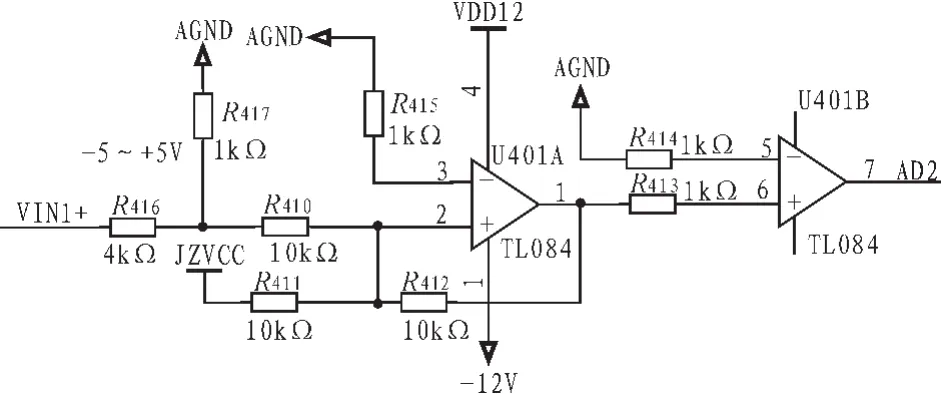
图6 电压调理电路图Fig.6 Voltage conditioning circuit
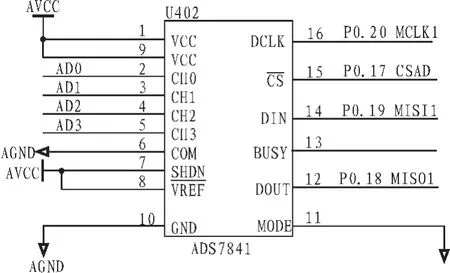
图7 A/D转换电路图Fig.7 A/D conversion circuit
其中,CH0、CH1、CH2、CH3引脚为模拟输入通道,COM引脚为模拟输入接地参考;当SHDN为地时,芯片进入低电压关闭状态;MODE引脚设置转换模式,当为低电平时,芯片进行12位转换;DCLK为外部时钟输入接口,连接至处理器P0.20引脚;DIN引脚为串行数据输入,连接至处理器P0.19引脚,当片选信号为低时,SCLK上升沿锁存;DOUT引脚为串行数据输出,连接至处理器P0.18引脚,当片选信号为低时,SCLK下降沿输出。 模拟信号AD0、AD1、 AD2、AD3通过CH0、CH1、CH2、CH3四通道进入A/D转换器内,经A/D转换后通过DOUT引脚串行输出送入微处理器LPC2292做进一步处理。
2.4 电源电路
电源部分采用外置电源模块将24 V直流电经过DC-DC转化为12 V直流电输出。再采用LM2575将12 V电压转化为5 V电压输出,由于ARM7 IO口电压是3.3 V,内核电压是1.8 V,故采用ASM1117-3.3将5 V电压转化为3.3 V输出,ASM1117-1.8 V将3.3 V电压转化为1.8 V。
3 实验结果
文中数据采集装置软件采用嵌入式C语言设计,开发环境采用ADS1.2,主要完成数据采集装置完成多种接口的数据采集、协议转换、数据预处理等,将数据组帧通过串口传输到评价验证计算机。利用VC++设计评价验证计算机的软件平台,实现良好的人机交互界面,并完成组合导航评价验证功能。通过进行汽车实验,能够实现对导航设备的数据采集、传输、解析和处理,通过对GPS真值和被测设备测量值的对比验证,计算两者的误差,并辅以惯导的导航数据,完成了对组合导航系统的实时监测和性能评价,取得了很好的应用效果,系统运行结果如图8所示。

图8 系统运行结果图Fig.8 Running result diagram of system
4 结束语
现代导航技术是一项集合了多学科的综合技术,其中主要包括精密机械、微电子、计算机技术、无线电技术、自动控制、光学等。现代组合导航系统克服了单一导航设备抗干扰性能差和自身误差累积等缺点,取长补短,既能依靠惯导设备提高抗干扰能力,增强隐蔽性和自主性,同时可以利用GPS提供精确的导航定位定向信息实时修正导航误差。在组合导航系统中,需要确保其快速、准确、可靠、持久地运行,因此组合导航评价验证系统应运而生。
本文设计了组合导航评价验证系统,以ARM7 LPC2292处理器为核心,通过TL16C554串口扩展芯片完成串口扩展,实现对不同导航参数的采集和控制传输。数据采集装置能够采集GPS信息、惯性组件信息、被测导航设备信息,经过协议转换、数据预处理等并传输到导航评价验证计算机。导航评价验证计算机提供良好的人机界面,将接收到的数据采集装置传输来的数据进行解析、后处理,进行评价验证,并建立相应的数据库系统,完成了对组合导航准确性和精确度的评价。
[1]范首东,曹旭,赵峰.基于微处理器的紧耦合组合导航系统设计[J].微处理机,2010(9):18-21.
FAN Shou-dong,CAO Xu,ZHAO Feng.The design of tightly coupled navigation combination system based on MPU[J].Microprocessors,2010(9):18-21.
[2]林志强.双DSP的捷联惯导计算机设计与实现[D].哈尔滨:哈尔滨工程大学,2009.
[3]周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2005.
[4]任安虎,张燕.综合测试系统中串口扩展的设计与实现[J].信息技术,2010(9):58-61.
REN An-hu,ZHANG Yan.Design of the serial port expansion in comprehensive test syetem[J].Information Technology,2010(9):58-61.
[5]程合彬.嵌入式通信控制器协同设计与应用关键技术研究[D].山东:山东大学,2007.
[6]高旭东.基于NIOS的信号采集处理IP终端设计[D].成都:成都理工大学,2007.