基于力矩模式的矿山牵引电机车控制系统的研究与实现
2011-06-02陈名辉徐立波
宗 剑, 阮 毅, 陈名辉, 徐立波
(1.上海大学机电工程与自动化学院,上海 200072;
2.上海应用技术学院电气与电子工程学院,上海 201418)
0 引言
矿山牵引电力机车是矿山重要运载设备,逐渐由交流电机驱动取代直流驱动。牵引系统供电电源大多处在负荷的末端,电压波动较大,电能质量较差。机车运行轨道多数依地形而铺设,机车运行颠簸常使受电电弓掉电而中断供电。应用中要求机车控制系统能适应频繁起动、制动、加速、减速等不同工况,同时要求牵引电力机车具有起动转矩大、带负载能力强、对供电电压波动适应能力强等特性[1,5-6]。
传统的牵引电机控制多采用速度闭环控制。但是,机车的频繁起动、制动、加速、减速会导致电网波动较大,给控制带来很多困难,特别是在减速、制动过程中机车运行平稳性较差,制动产生的能量会导致电压泵升,给矿山供电系统的绝缘带来严重考验。在满足电力机车供电及控制要求的前提下,研究采用力矩模式,实现矿山牵引电力机车的控制,在一定程度上抑制电压泵升,对矿山供电系统的安全有重要意义[2-6]。
1 电机控制模型[2]
牵引电机采用异步电机成为主要趋势,但异步电机具有非线性、强耦合、多变量等性质,要获得良好的调速性能,必须从动态模型出发。经过Clarke变换和Park变换后,可获得由静止坐标系变换到任意旋转坐标系(d-q坐标系)下状态方程。
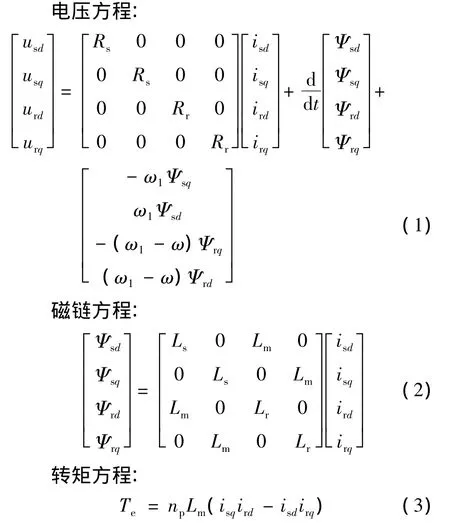
为获得等效直流电机模型,按照直流电机的控制方法控制电磁转矩和磁链,采用以ω-is-Ψr为状态变量,可得到按转子磁链定向矢量控制系统,为保持dq旋转坐标系与转子磁链矢量严格保持同步旋转,使d轴与转子磁链矢量重合,可得按转子磁链定向同步旋转的M-T坐标系。由于M轴与转子磁链矢量重合,故有:

为保证M轴与转子磁链矢量严格重合,还应满足:

可获得按转子磁链定向同步旋转坐标系M-T中状态方程:
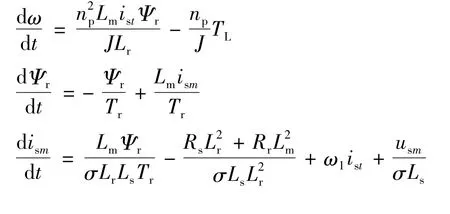
由式(6)可以解得:
ω——电机实际转速;
ω1——同步转速;
ωs——转差;
Ψs、Ψr——定、转子磁链;
np——电机极对数;
下标 r、s——转子、定子。
经过坐标变换和按转子磁链定向,三相异步电机等效为一台由ism和ist为输入,ω为输出的直流电机。m绕组相当于直流电机的励磁绕组,ism相当于励磁电流,t绕组相当于电枢绕组,ist相当于电枢电流。
2 力矩模式控制系统
在按转子磁链定向的矢量控制系统基础上,结合矿山牵引电机车要求起动转矩大、运行平稳,而对速度的控制精度要求不高等特点,为使控制系统简单,可省去速度环节,将定子电流转矩分量作为直接给定量,由机车司机直接对定子电流转矩分量进行调节,这样可以简化控制系统的结构,减少控制系统的运算量,其特点是控制模式可以实现类似于汽车驾驶,对机车驾驶人员来说更容易接受。同时,这种控制方式又不同于直接转矩控制,其基于按转子磁链定向的矢量控制系统,既继承了矢量控制方式控制连续平滑和无转矩脉动的优点,又能达到对转矩直接控制的效果。力矩模式结构图如图1所示。
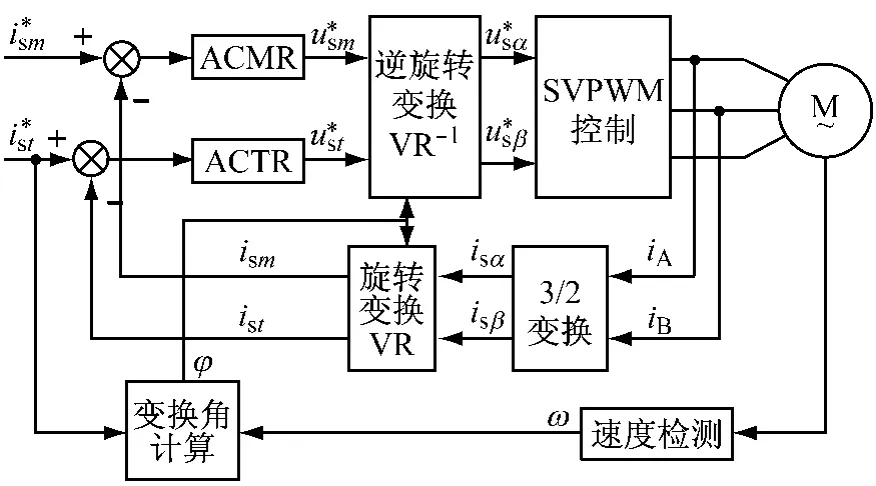
图1 力矩模式控制系统结构图
力矩模式采用磁链开环的控制方式,无需计算转子磁链幅值,但对于矢量变换而言,仍然需要转子磁链的位置信号。为避免计算磁链相位角时受电机参数Tr和Lm变化的影响,系统尽可能加以简化,控制中磁场定向采用间接定向,即用定子电流转矩分量给定信号和转子磁链给定信号计算转差频率给定信号,如式(11)所示,将转差频率给定信号加上实际转速ω,得到坐标系的同步旋转角速度,经积分环节产生矢量变换角,实现转差频率控制功能。

3 系统构建与试验
系统主电路采用AC-DC-AC模式工作,由于采用力矩模式控制,在减速过程中不产生泵升电压,故AC-DC采用二极管不可控整流。系统包括主电路、控制电路和附件。控制系统采用以微芯片dsPIC30F6010A为核心的控制器,包括电流、电压检测模块,测速模块,保护模块和通信模块等。控制系统和上位机部分通过CAN通信进行实时通信。系统主电路结构如图2所示。
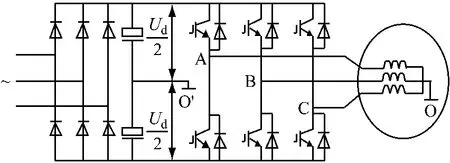
图2 系统结构拓扑图
试验电机采用矿山牵引型异步电机,电机参数如下:PN=45 kW,f=50 Hz,IN=84 A,n=1 460 r/min,Te=286 N·m,Rs=0.120 3 Ω,Rr=0.096 89 Ω,Lm=0.081 57 H,Lr=0.084 55 H,np=2。为验证控制系统的动态性能,测取系统起动、突加负载、突减负载、稳定运行时的定子电流波形。图3~图5分别为力矩模式下带负载起动,突加、突减负载和稳定运行时A、C两相定子电流波形图。由所测波形可知,系统在突加、突减负载时响应迅速,负载变化时转速能够快速恢复,系统有较好的加载特性。
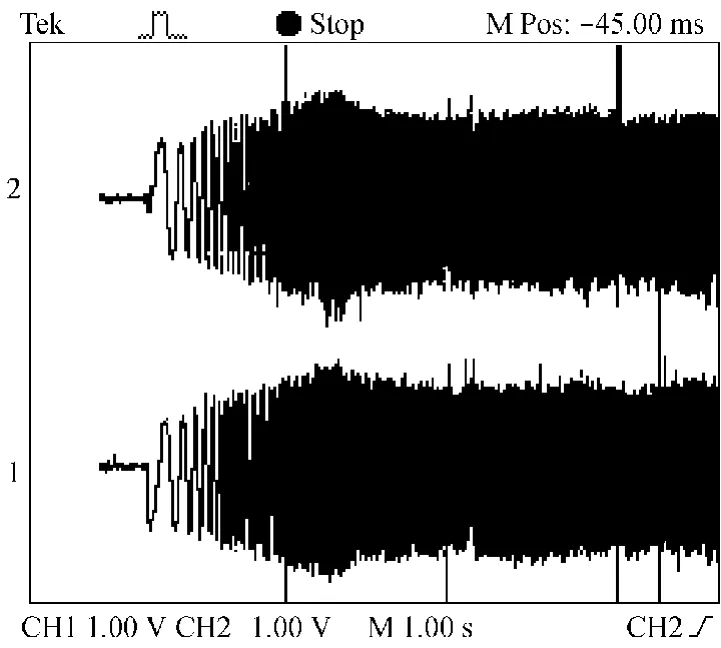
图3 带负载起动定子电流波形
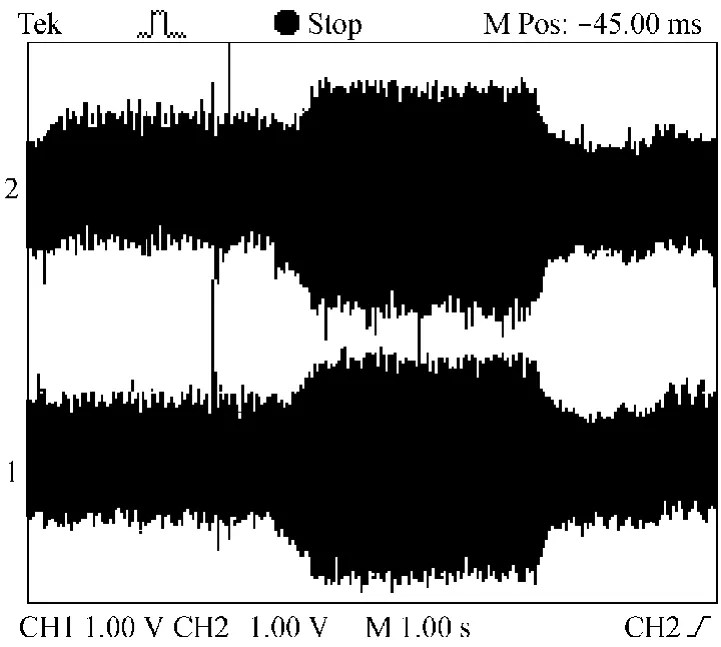
图4 突加负载、突减负载定子电流波形
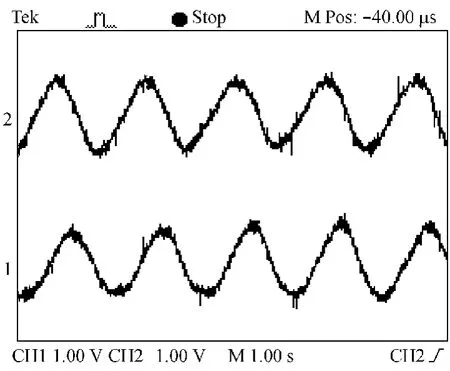
图5 稳态运行时定子电流波形
4 结语
试验证明,采用力矩模式控制,系统运行稳定,能够满足系统起动时输出大转矩的要求,同时在频繁切换时系统运行平稳,能够有效克服在减速制动过程中直流母线电压泵升,系统结构简单、通用性很强,满足工矿对牵引电机车控制性能要求。
[1]杜贵平,李树强,姜孝华,等.矿用电机车最大转矩交流牵引驱动系统[J].电气传动,2010(8):16-19.
[2]阮毅,陈伯时.电力拖动自动控制系统–运动控制系统[M].4版.北京:机械工业出版社,2009.
[3]李振璧,石晓艳.基于DSP控制的蓄电池电机车直流斩波调速系统[J].煤矿机电,2007(2):26-28.
[4]王淑芳,杨智勇,席巍.矿用电机车调速控制系统研究[J].金属矿山,2009(8):101-105.
[5]葛丽霞.矿用机车直流电源变换器的研究开发[J].机械管理开发,2010(3):44-46.
[6]卢文生,郭殿林,闫大新.基于DSP的矿井电机车调速系统的设计[J].自动化仪表,2009(10):16-22.