基于TMS320F28335实现矢量空间解耦的六相空间矢量脉宽调制*
2011-06-02潘海鸿黄海明黄炳琼
陈 琳, 封 华, 潘海鸿, 黄海明, 黄炳琼
(广西大学机械工程学院,广西南宁 530004)
0 引言
多相电机系统与传统三相电机系统相比,具有运行可靠性高、转矩脉动小、电机效率高、易实现低压大功率输出等优点[1-3],在大功率驱动领域有着广阔的应用前景。
空间电压矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)技术因其具有较低谐波输出含量和较高母线电压利用率等优点,得以广泛应用。多相电机SVPWM技术是多相电机驱动技术研究的重点。1993年,Gopakumar等[4]将用于三相的SVPWM控制方法直接推广到六相SVPWM,得到传统的六相SVPWM方法,该方法用扇区两侧相邻的两个最大矢量和零矢量合成参考矢量,产生的谐波电流大[5];Hadiouche 等[6]提出分级、多相SVPWM方法,采用三个非零矢量和零矢量合成目标矢量,产生的谐波电流大;侯立军等[7]把三相电压统一调制技术运用到六相异步电机,该算法运算简单,易于推广到以三相组为子集的多相电机控制系统;文献[8]提出基于空间矢量解耦的SVPWM方法,使目标电压矢量在发生能量交换的d-q平面内合成,同时使输出电压矢量在一个周期内零序谐波平面内平均作用效果为零,有效抑制了广义零序子空间中电流分量。该方法目前理论上较理想,但算法复杂、运算量大,不易推广[5,9-10]。
依据矢量空间解耦多相SVPWM算法原理,以双Y相移30°的六相永磁同步电机为研究对象,提出了一种采用TMS320F28335数字信号处理器(Digital Signal Processor,DSP)作为功率驱动器主控芯片,实现矢量空间解耦的SVPWM方法。采用求零序平衡矢量的方法求矢量作用时间,推导出ePWM模块控制规律;搭建试验平台,实现矢量空间解耦的六相SVPWM控制方法。
1 矢量空间解耦的六相SVPWM控制的基本原理
图1是六相电压源逆变器驱动双Y相移30°永磁同步电机示意图。图1中,A、C、E和B、D、F分别为电机内部两套Y绕组,它们在空间上相差30°电角度,需要六相逆变器驱动。与六相逆变器64个开关状态对应,在电机空间有64个开关状态矢量,采用矢量空间解耦变换,将64个开关状态矢量投影到三个相互正交的子空间:d-q子空间、z1-z2子空间和o1-o2子空间。由双Y相移30°电机矢量空间解耦数学模型[11]可知,电机内部机电能量转换发生在d-q子空间内,在其他子空间内只产生谐波电流。因而在各脉宽调制(Pulse Width Modulation,PWM)周期内,用矢量空间解耦的六相SVPWM方法,在d-q子空间内合成参考电压矢量。由于在z1-z2子空间合成参考电压矢量的平均电压作用效果为零,从而达到抑制定子绕组谐波电流的目的[8]。在一个PWM周期内,选取d-q子空间最大矢量和零矢量合成参考电压矢量,如图2所示。在d-q 子空间扇区 2,选取扇区两侧 U49、U48、U56、U60四个大矢量和零矢量合成参考矢量U,并定义U49、U48、U56、U60和零矢量作用时间依次为 T1,T2,T3,T4和T0,采样周期(PWM周期)为Ts,则根据伏秒平衡,在d-q子空间、z1-z2子空间有式(1)和式(2)。
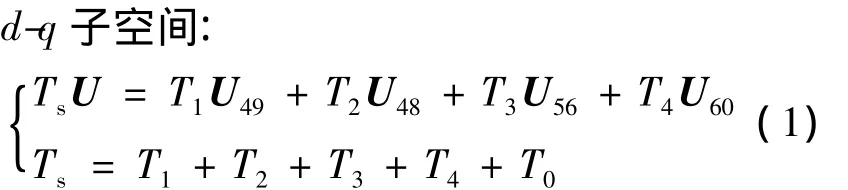
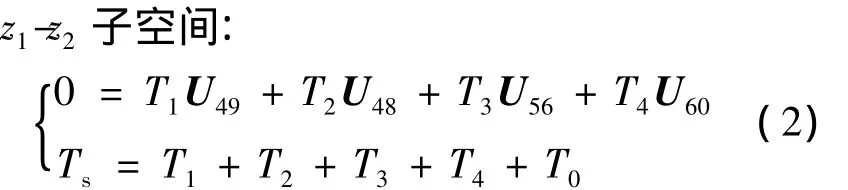
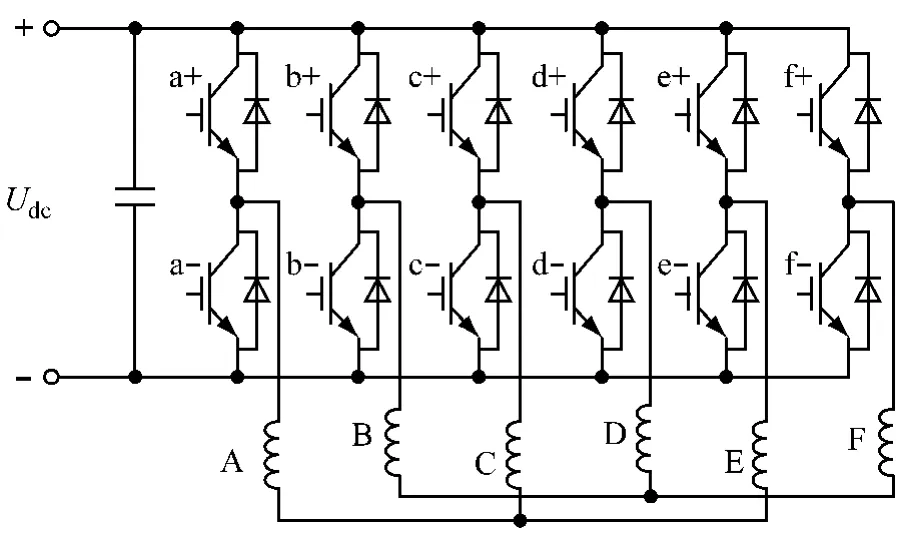
图1 电压源逆变器驱动双Y相移30°PMSM示意图
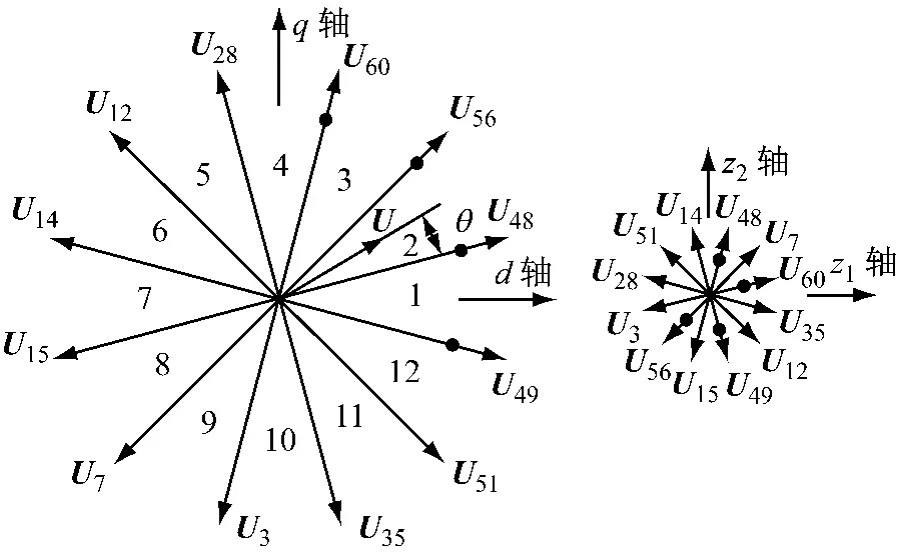
图2 开关状态矢量选择
根据零序平衡矢量[9]方法,按式(3)求出式(1)、式(2)中矢量作用时间 T1,T2,T3,T4和 T0。
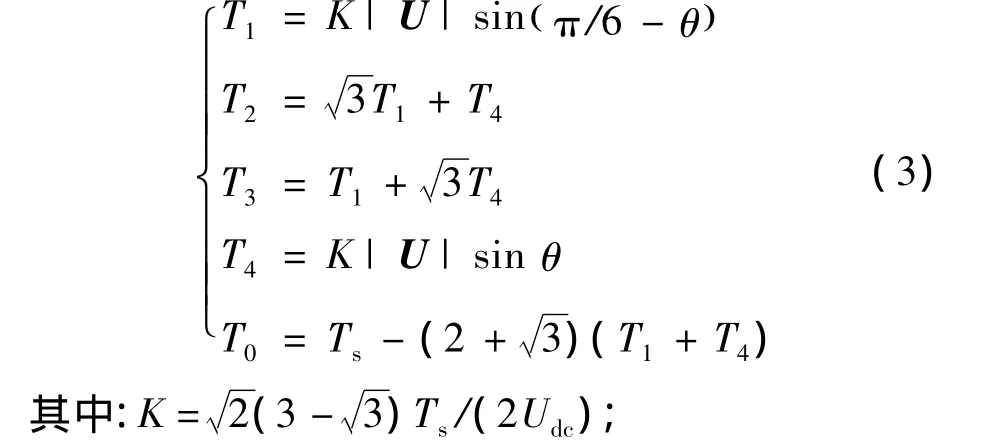
Udc——直流母线电压;
θ——参考矢量与扇区下边界矢量夹角,θ∈[0 ,π/6]。
在一个PWM周期内,四个非零矢量若采用逆时针顺序依次作用,则在扇区1、2、5、6、9和10内有桥臂PWM波形出现两个脉冲,这不利于控制波形输出[10]。为此,通过调整矢量作用顺序,使一个采样周期内各桥臂功率管只开关一次,12个扇区矢量作用顺序调整后的结果如表1所示。
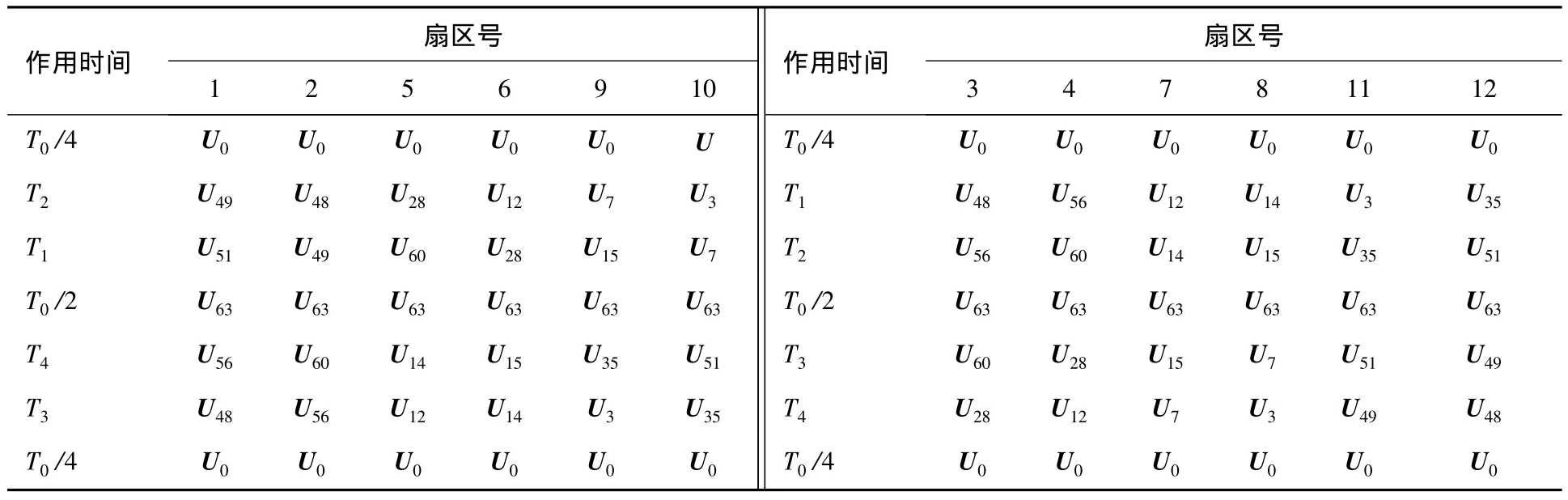
表1 12扇区矢量作用顺序表
2 六相电机SVPWM控制
TMS320F28335片内6个ePWM模块同步工作时能够输出6对互补PWM信号,能够实现双Y相移30°永磁同步电机全桥控制。
2.1 ePWM模块控制规律推导
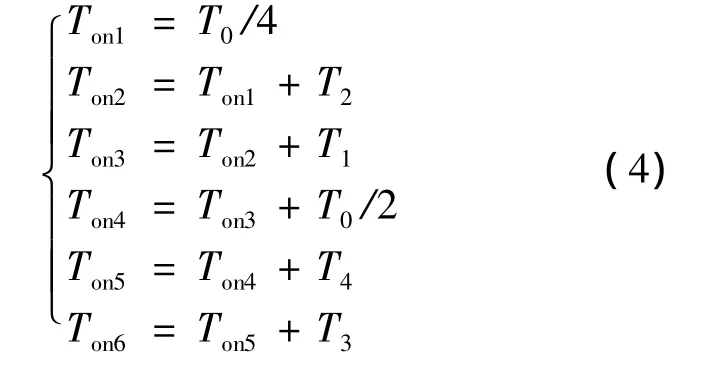
由表1可知,12个扇区的PWM输出波形均为不对称PWM波形,因而ePWM硬件模块计数方式选择连续递增模式。此外,根据表1中12个扇区矢量作用时间的顺序,将其分为两类:T0/4、T2、T1、T0/2、T4、T3、T0/4;T0/4、T1、T2、T0/2、T3、T4、T0/4。因此,在矢量作用时间转换为比较值时,也分两种情况考虑,以扇区1和扇区3为例,对这两种情况进行分析(见图3)。
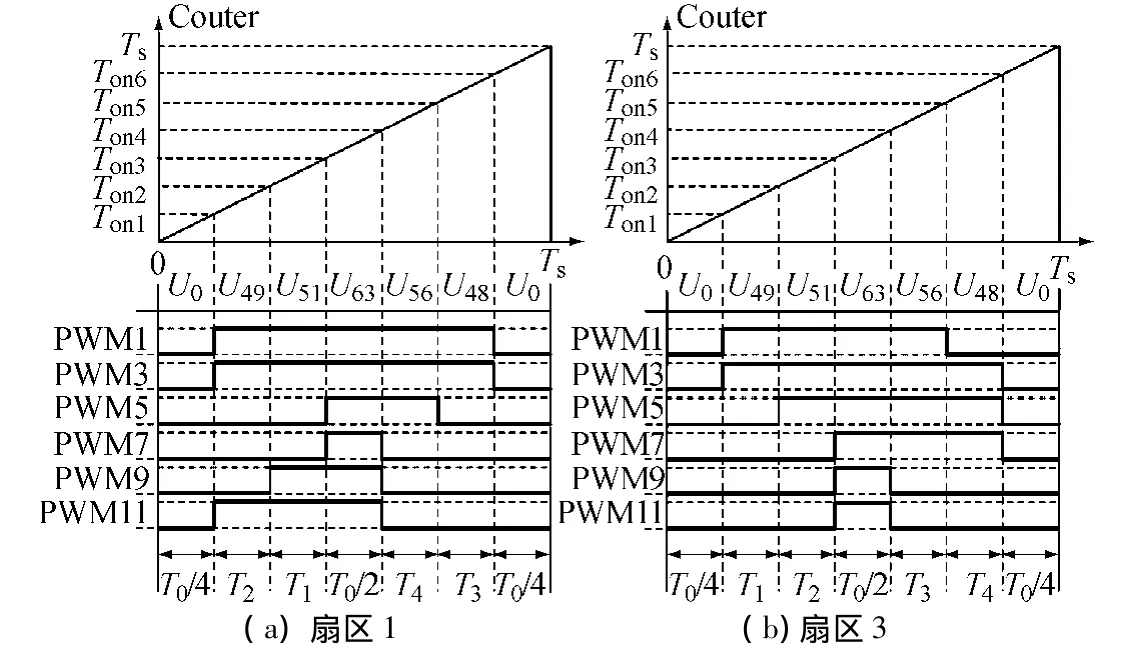
图3 矢量作用时间与比较值转换
6个ePWM硬件模块需选择合适的比较值以确定各相PWM波形的上升沿和下降沿时间。以PWM1波形为例,根据图3(a),按照式(4)计算Ton1、Ton2、Ton3、Ton4、Ton5、Ton6,上升沿时间对应比较值Ton1,下降沿对应比较值Ton6。因而选择ePWM1模块比较寄存器CMPA、CMPB的比较值分别为Ton1、Ton6。其他5路同理。
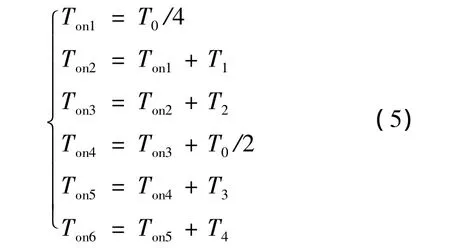
同理,由图3(b)按照式(5)可得到第二类的6个ePWM模块比较寄存器比较值选择。
根据分析,归纳出12扇区比较值计算公式选择(见表2);12扇区PWM波形对应ePWM模块控制规律如表3、表4所示。表中,CMPA、CMPB分别对应ePWM模块中比较寄存器A、B的比较值。
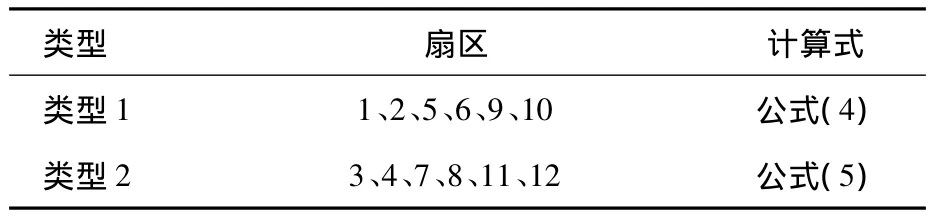
表2 12扇区比较值计算公式选择
2.2 矢量空间解耦六相SVPWM算法
根据表 2~表 4,按照图 4所示流程,在TMS320F28335中实现矢量空间解耦六相电机SVPWM算法的具体步骤如下。
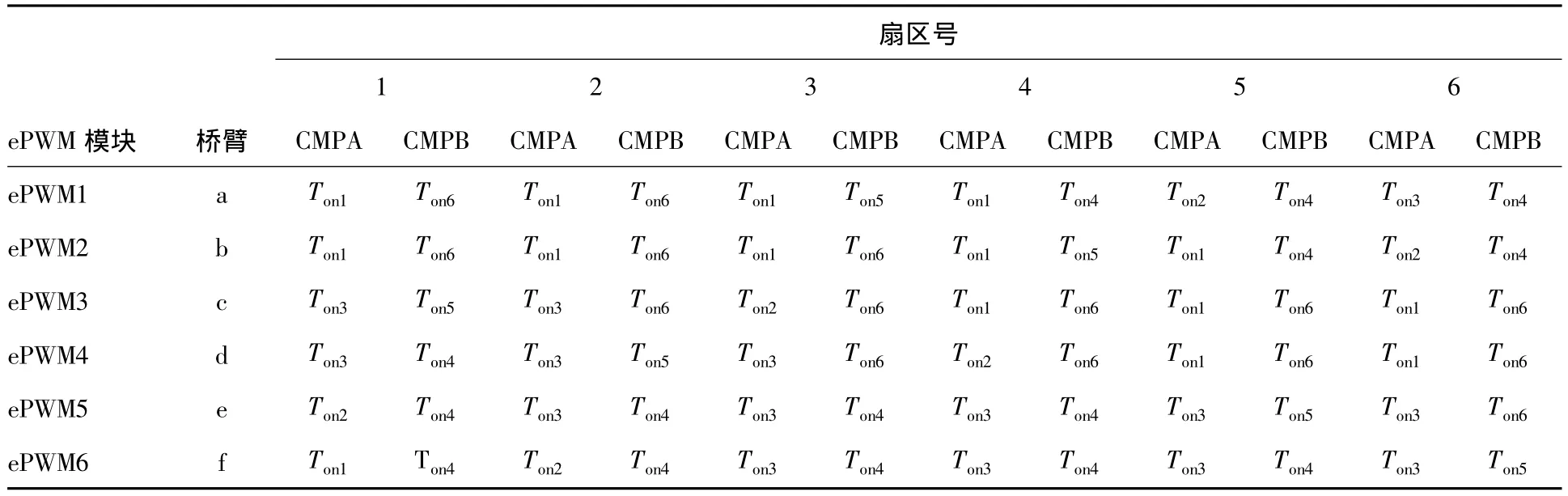
表3 1~6扇区ePWM模块控制规律
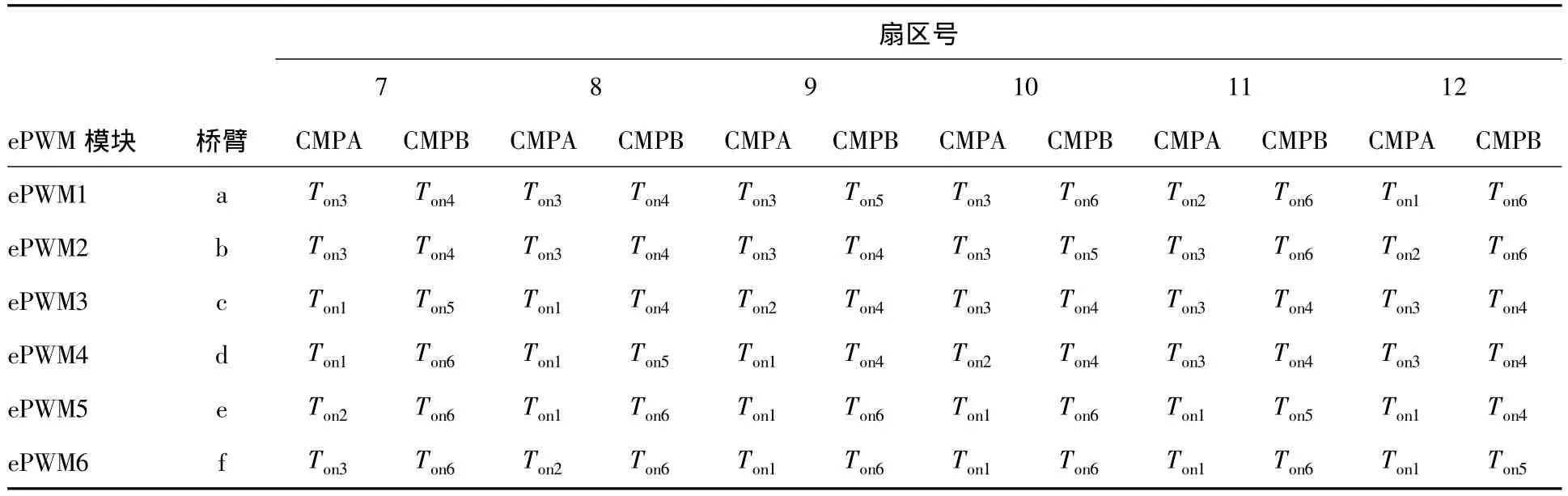
表4 7~12扇区ePWM模块控制规律
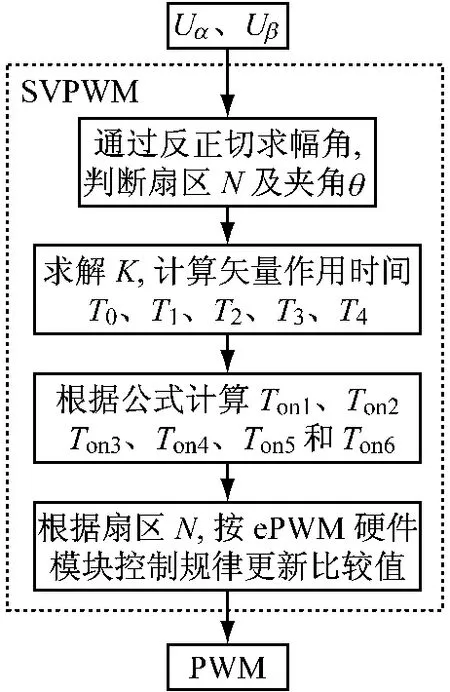
图4 实现SVPWM算法流程图
(1)扇区判断:根据参考电压矢量(Uα,Uβ)进行扇区判断,确定扇区号N,求Uβ/Uα反正切值、计算出参考电压矢量与d轴正轴所成的角度,按12个扇区不同角度范围确定参考电压矢量所在扇区号N,同时求出参考矢量与扇区下边界矢量夹角θ。
(2)开关状态矢量作用时间计算:根据式(3)计算扇区内矢量作用时间 T1、T2、T3、T4和 T0。
(3)扇区内矢量作用时间转换为比较值:根据扇区号N,依据表2选择对应公式计算出比较值 Ton1、Ton2、Ton3、Ton4、Ton5和 Ton6。
(4)根据扇区号N和推导出的ePWM模块控制规律,选择确定ePWM模块比较寄存器比较值,进而实现12路PWM波形输出。
3 试验验证与分析
3.1 试验平台
根据试验系统框图,搭建试验平台。TMS320F28335开发板作为功率驱动器的主控单元。在CCS 3.3环境下设置 TMS320F28335的CPU时钟为 150 MHz,GPIO0-GPIO11引脚为PWM输出,采样周期Ts为200 μs,主中断为ePWM1模块的计数器的值为零时触发中断,矢量空间解耦SVPWM算法(见图4)在主中断服务程序中执行。每个PWM周期内控制程序按照ePWM模块控制规律更新ePWM模块比较值,最终实现矢量空间解耦六相SVPWM波形的实时输出。
3.2 试验结果与分析
(1)采用逻辑分析仪观测PWM控制波形。试验参考电压 Uα=100 V、Uβ=60 V,按式(3)计算矢量作用时间(T1、T2、T3、T4和 T0),通过逻辑分析仪观测不同扇区的PWM输出(见图5)。图5(a)为扇区1的PWM波形输出,6路波形逻辑关系与图3(a)相同;图5(b)为扇区3的PWM输出,6路波形逻辑关系与图3(b)相同,这表明TMS320F28335的ePWM模块可实现矢量空间解耦的六相SVPWM控制波形。图5(c)为输出6对带有死区的互补PWM波形,符合六相逆变器全桥控制要求[12]。
(2)六相SVPWM开环系统试验:设定f*=100 Hz,=0,=100 V,低通滤波电路中R=40 kΩ,C=10 nF,死区时间设置为6.4 μs,通过示波器观测到的输出波形如图6所示。图6(a)为a相桥臂互补控制信号,检测到有6 μs的死区时间;图6(b)为a相桥臂滤波前、后的波形信号;图6(c)为a相和c相波形信号,a相超前c相3.44 ms,即a相超前c相约124°,比理论值120°略大;图6(d)为a相与b相波形信号,a相超前b相800 μs,即 a 相超前 b 相约 29°,比理论的 30°略小。上述试验结果表明,由TMS320F28335作为功率驱动器主控芯片,能够输出符合双Y相移30°永磁同步电机驱动要求的PWM控制波形信号。图6(e)为线电压控制信号波形,是a相波形与c相波形的差信号波形,可见为正弦波形。图6(f)为a相波形经快速傅里叶变换得到频谱图,从图中可以看出波形信号主要频率成分为基波和3次谐波,5、7次谐波成分被抑制,表明z1-z2空间谐波电压得到控制,达到抑制电机谐波电流目的,这与矢量空间解耦算法的效果相符合。
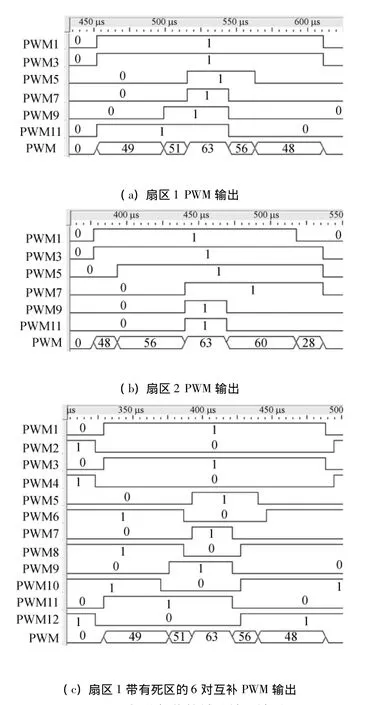
图5 逻辑分析仪的试验结果波形
4 结语
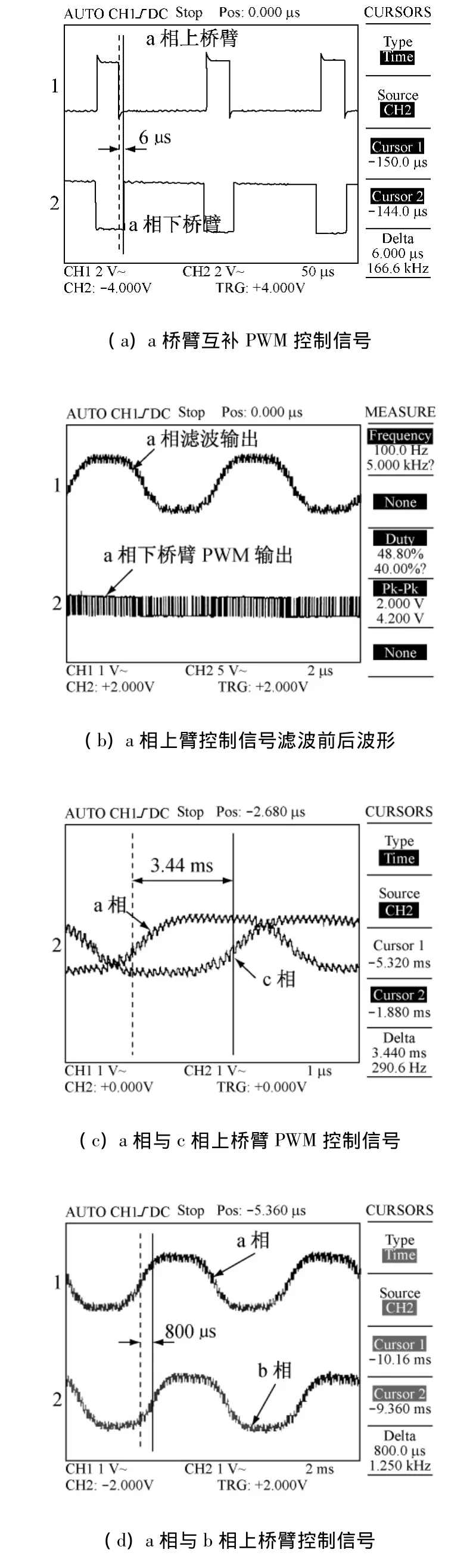
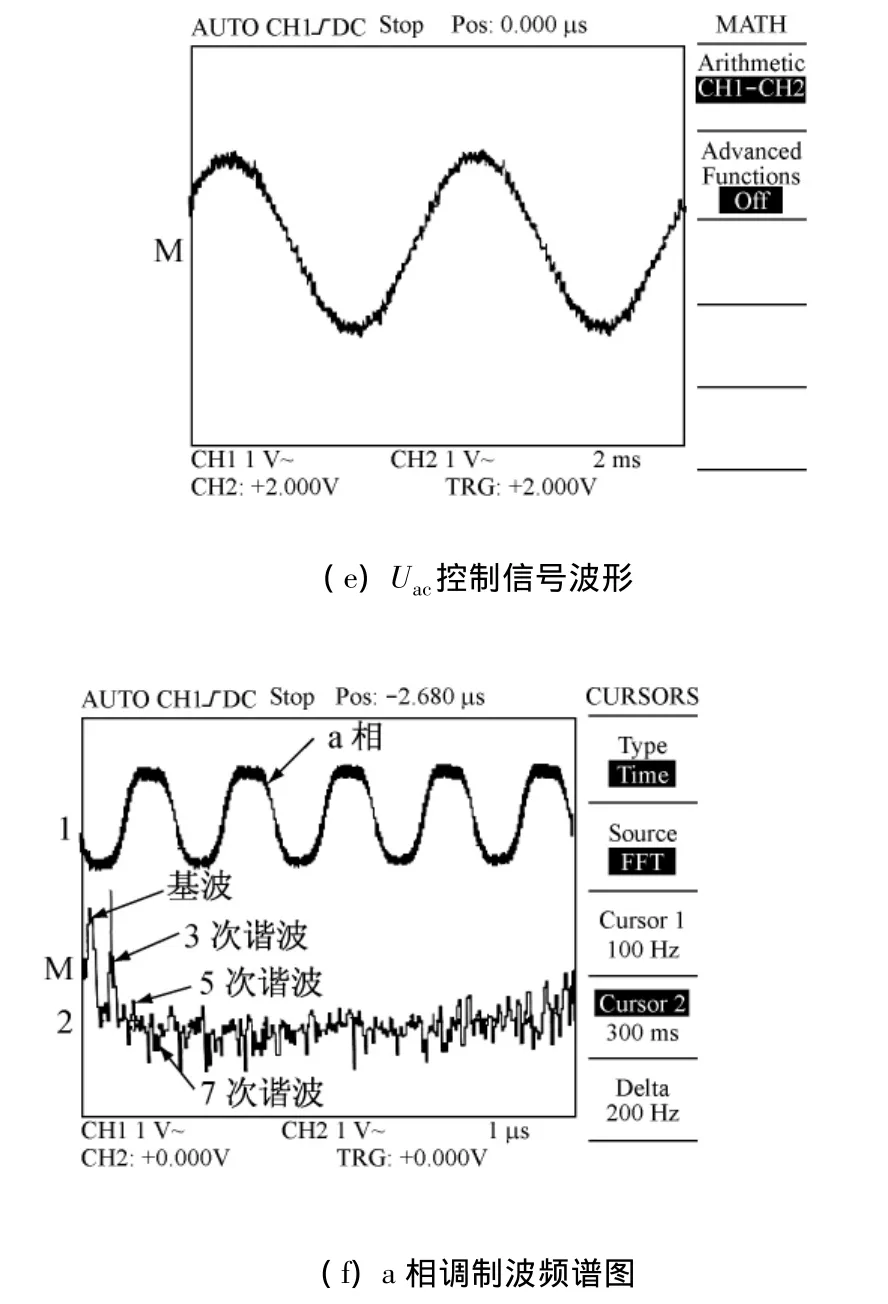
图6 示波器试验结果波形
根据矢量空间解耦的多相SVPWM控制原理,提出采用TMS320F28335作为功率驱动器主控芯片,解决多相电机驱动控制算法复杂、计算量大等问题。通过研究TMS320F28335电机控制外设模块ePWM模块的特点,以双Y相移30°PMSM为研究对象,运用矢量空间解耦控制原理推导出ePWM模块控制规律,并在TMS320F28335开发板上实现了矢量空间解耦的六相SVPWM控制方法。试验结果一方面证实TMS320F28335作为主控芯片,易于实现复杂的矢量空间解耦多相SVPWM算法,其输出的多路PWM波形能够满足双Y相移30°的永磁同步电机驱动要求;另一方面表明矢量空间解耦算法可有效抑制电压谐波空间的5、7次谐波,达到抑制谐波电流的目的,这便于将矢量空间解耦的SVPWM方法进行推广。
[1]王步来,顾伟,褚建新,等.船舶电力推进用双三相永磁同步电动机建模[J].哈尔滨工程大学学报,2009,30(4):347-352.
[2]刘东,黄进,于文娟,等.空间矢量PWM多相变频调速系统非正弦供电技术[J].电机与控制学报,2010,14(9):41-47.
[3]于飞,张晓锋,李槐树,等.五相逆变器的空间矢量PWM 控制[J].中国电机工程学报,2005,25(9):40-46.
[4]Gopakumar K,Ranganathan V T,Bhat S R.Splitphase induction motor operation from PWM voltage source inverter[J].IEEE Transactions on Industrial Electronics,2009,29(5):927-932.
[5]薛山,温旭辉.一种新颖的多相SVPWM[J].电工技术学报,2006,21(2):68-72.
[6]Hadiouche D,Razik H,Rezzoug A.Study and simulation of space vector PWM control of double-star induction motors[C]∥IEEE CIEP,Acapulco,Mexico,2000:42-47.
[7]侯立军,苏彦民,陈林.一种新颖的用于六相感应电机调速系统的空间矢量PWM方法[J].电工电能新技术,2004,23(1):11-15.
[8]Zhao Yi fan,Lipo T A.Space vector PWM control of dual three-phase induction machineusing vector space decomposition[J].IEEE Transactions on Industry Applications,1995,31(5):1100-1109.
[9]李山,刘述喜,肖蕙蕙,等.基于零序平衡矢量的六相感应电动机 SVPWM策略研究[J].机床与液压,2009,37(8):388-393.
[10]Marouani K,Baghli L,Hadiouche D,et al.A new PWM strategy based on a 24-sector vector space decomposition for a six-phase VSI-fed dual stator induction motor[J].IEEE Transactions on Industrial Electronics,2008,55(5):1910-1920.
[11]杨金波,杨贵杰,李铁才.双三相永磁同步电机的建模与矢量控制[J].电机与控制学报,2010,14(6):1-7.
[12]潘海鸿,陈斌,陈琳,等.考虑零电流嵌位的永磁同步电机死区效应补偿方法[J].电机与控制应用,2010,37(10):1-5.