基于DSP2407的异步电机数字式软起动器设计
2011-06-02谷志锋栗彦辉叶秀羲
谷志锋, 张 岭, 栗彦辉, 叶秀羲
(军械工程学院,河北石家庄 050003)
0 引言
传统的电机起动设备,如饱和电抗器、自耦变压器、Y/△转换器等,在很大程度上缓解了大容量电机在相对较小容量电网上起动时的矛盾。但它们只是缩短了大电流冲击的时间,并未从本质上解决问题[1-3],且存在负载适应能力差、起动电流不连续、触点继电控制及浪费能源等缺陷。数字式电机软起动器具有结构简单、无触点、无噪声、体积小、重量轻、起动电流及起动时间可控、起动过程平滑、具备完善的电机保护功能等优点,并且维护工作量小、节能效果显著[4]。
1 数字式软起动控制原理
新型数字式软起动器的主路采用晶闸管调压回路[5-6],调压电路由6只晶闸管两两反向并联组成,串接在电机的三相供电线路中。当数字控制系统接到起动指令后,通过隔离变压器和电流互感器采集电机端口电压、电流等,同时进行有关计算,控制晶闸管的触发角α,控制电机的起动过程(电压斜坡、恒流或恒功率因数等)[7]。当起动过程完成后,旁路接触器吸合,短路掉所有的晶闸管,使电机直接投入电网运行,避免不必要的电能损耗。数字式防暴软起动器还具有数码管和液晶混合显示、漏电检测、通信、相序自判断等功能。数字式软起动控制框图如图1所示。
2 数字式软起动控制器硬件电路
2.1 DSP2407型软起动器的总体结构
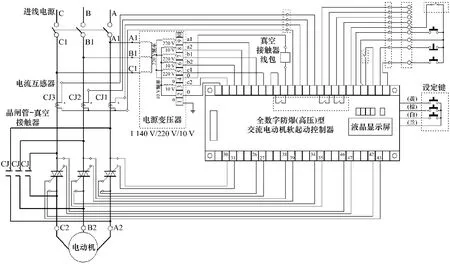
图1 数字式软起动控制系统框图
数字式电机软起动器的CPU采用了低功耗、快速运算速度的DSP2407,同时JETAG接口可以实施在线仿真和跟踪。外扩的61LV6416型RAM与 DSP2407直接相连,实现在线仿真运行的数据零时下载。按键功能采用具有模拟串行口功能的HD7279实现。CPU通过MAX485芯片可以实现长距离的数据传输。LCM320240ZK型液晶显示屏、93C46型E2PROM及各外扩芯片的片选线由ALTERA最新的MAXⅡCPLD EPM240(相当于8650门CPLD,烧写至少10万次以上)编程控制[8]。电机端口的电压、电流采集通过锁相环交流采集调理电路输入12位A/D转换器MAX197,并通过双向驱动 74LVC4245与DSP2407连接,提高了采集精度。由于需要实现6支晶闸管的触发控制,外扩了定时器芯片8254,触发脉冲通过光电隔离和脉冲列触发电路输出。DSP2407外围电路如图2所示。
2.2 高频脉冲列触发电路设计
为了减小脉冲变压器的体积,降低整个控制器的尺寸,同时提高触发的可靠性,设计了高频脉冲列触发电路,如图3所示。通过调整74LS123外扩阻容的大小,可以实现MC触发脉冲高电平信号的扩展,增加触发的可靠性。同时,扩展后的输出信号输入74LS175的CLE端,可以提高触发脉冲CFA、CFB、CFC的同时性。脉冲变压器的一次侧通过增加稳压管,可以提高触发脉冲的宽度,二次侧采用快速恢复二极管BYC26C,可以保证脉冲列触发的同时性[9]。
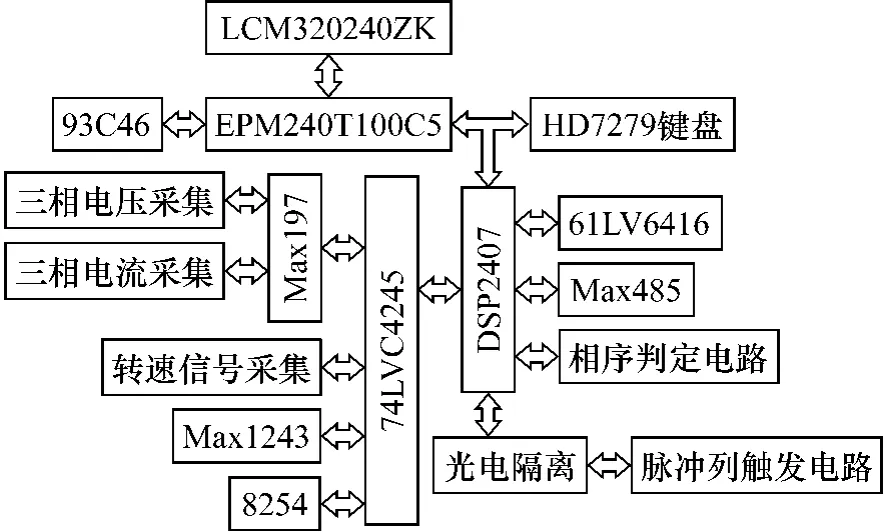
图2 DSP2407型软起动器的总体结构
设晶闸管触发角度为α,电流持续导通时间为θ,电机的阻抗角为β。由电路的知识知,当输入电压为U时,可得超越方程为


通常α >β,θ+α >180°,有 θ<180°,dθ/dα <0。导通角和触发角的关系如图4所示。
由图4可知,在相同的触发角度的情况下随
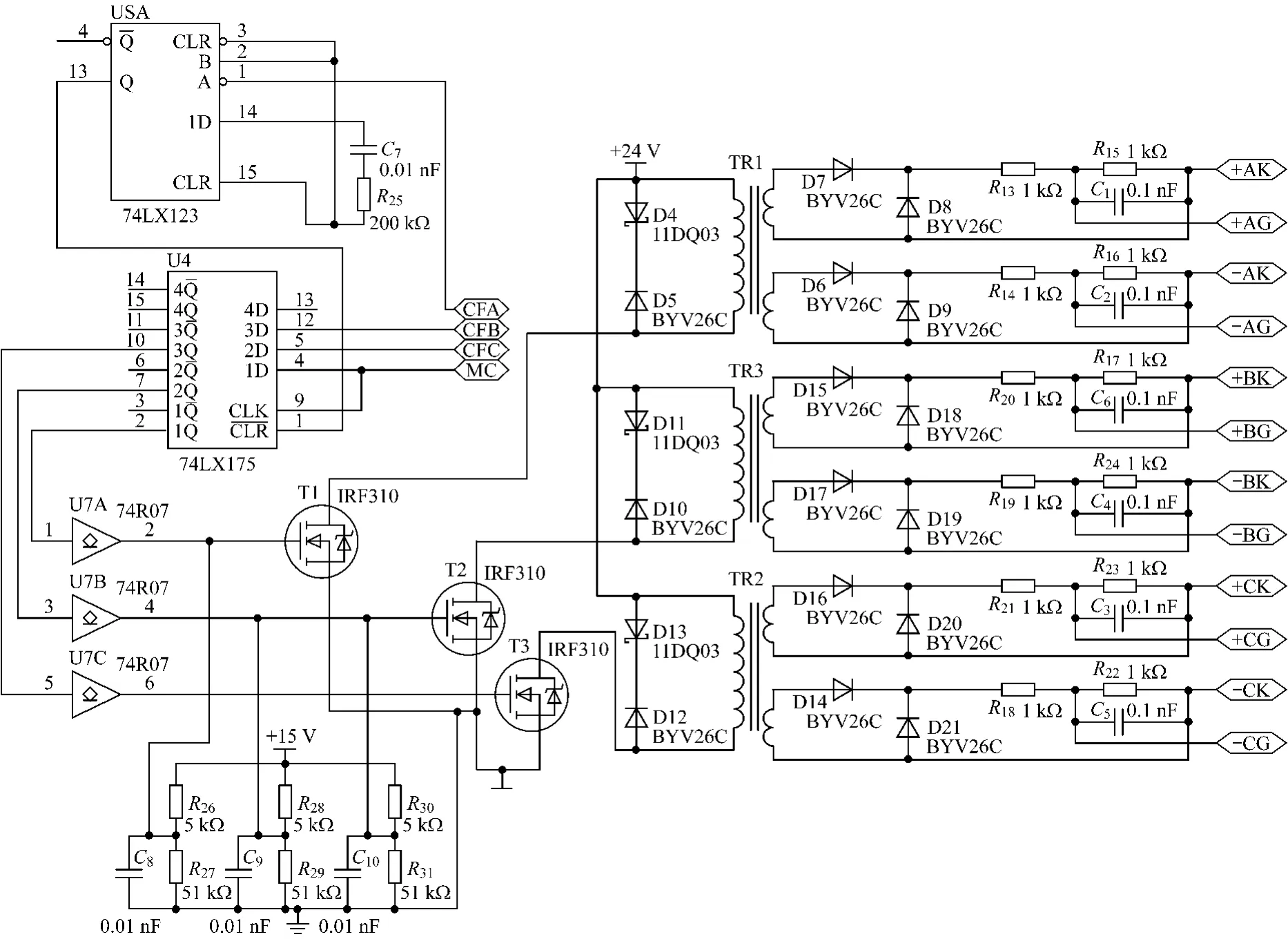
图3 高频脉冲列触发电路
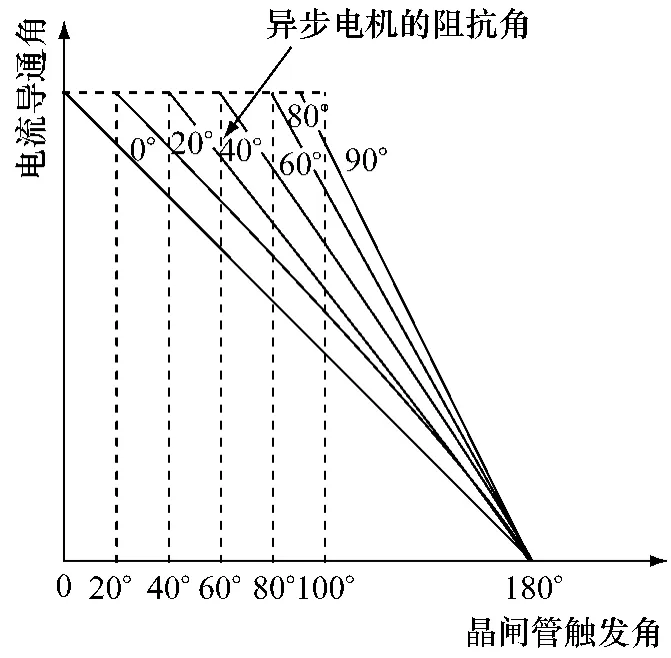
图4 触发角和电流持续导通角的关系图
如果认为β为常量,由式(1)可得:着阻抗角的减小,电流的导通角减小,由于电机在起动过程中R2/s在不断增大(s为电机转差率,大小为0~1),导致阻抗角减小,这样触发角在最大触发角(通常为100°)向30°前移过程中电流持续角减小,也就是说在起动过程中是一个动态的过程,触发角的范围在逐步扩大。如果设α+θπ=δ,δ代表电压过零后电流持续的导通角度,设

由于晶闸管存在动态的恢复时间,在δ=6°时,式(3)可得到γ很小,一般晶闸管的关断时间要几百 μs,而 6°电角度对应的时间为 300 μs,如果在正向可控硅没有关闭时,触发反向晶闸管达不到可靠触发的目的[10],同时由于R2/s也与负载的情况有关,这样在不同负载的情况下达到δ=6°的时间不一样,为达到动态监视晶闸管的关断时间,防止在6°以后的不可靠触发,设计了晶闸管的关断检测电路,如图5所示。
DSP2407检测电流的过零时刻并计时,判断是否在6°的不可靠的触发区间内,如果在这个范围之内,让晶闸管的旁路接触器关闭,电机处于全压运行状态,完成电机软起动过程。
2.3 电机漏电监视电路设计
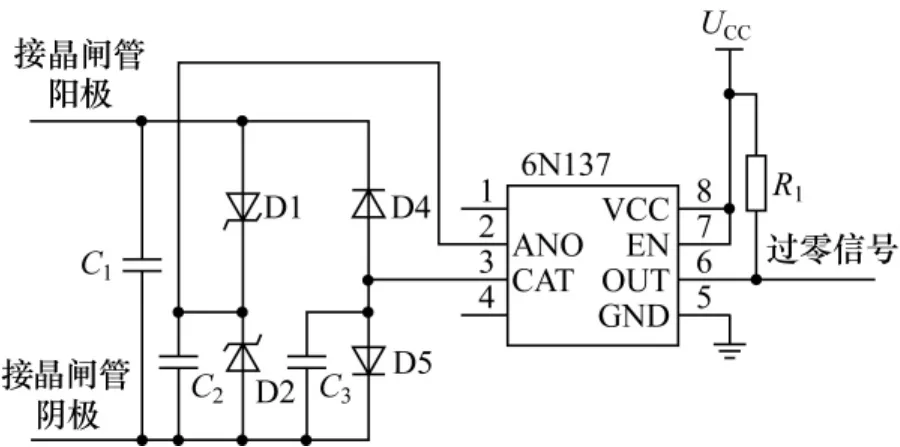
图5 晶闸管的电流过零检测电路
电机在经常运作的情况下会由于工作环境或α+π-(α+θ)=γ,γ代表反向触发时间与电流过零之间相位差,可得:者绝缘老化的原因,绝缘程度降低,如果不加以检测可能会出现危险,图6为绝缘检测电路。图中采用NE555构成双稳类电路,发电机机壳通过串联电阻与漏电保护电路相连,对于在660 V异步电机,绝缘电阻低于42 kΩ时,NE555第3脚会驱动继电器动作,并将漏电信号输给数字式软起动器,实现漏电保护。在刚上电时,图6中右部的NE555起到封锁漏电误动作信号的作用。
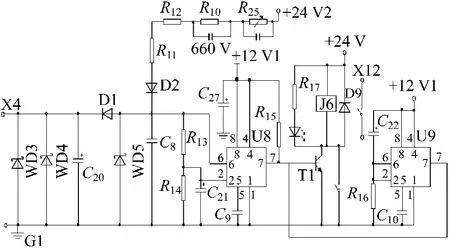
图6 电机漏电保护电路
3 数字式软起动器程序设计
交流电机软起动控制器的软件共包含主控制模块6个及与这些控制模块相关的子程序186个。主控制程序模块分别为主程序模块MAIN、运行控制模块MONT、α控制模块SHIFT、数据采集模块SMPL、故障诊断模块DIGN、RS-485串行通信模块SCOM。其中,MAIN模块完成控制参数的查看与设定、故障状态记录、运行状态显示等界面操作,并完成485串行通信管理;MONT模块为二级中断运行方式,其运行节律为100 ms;SHIFT模块为一级中断运行方式,是控制的中心环节。主程序MAIN模块的流程图如图7所示。

图7 主程序MAIN模块流程图
4 试验波形分析
在三相晶闸管部分导通时,将会产生各次谐波,谐波电压、电流既可能通过传导,也可能通过空间辐射耦合进入控制系统。图8是A相晶闸管两端电压和电流实测波形,图9是电机A相的
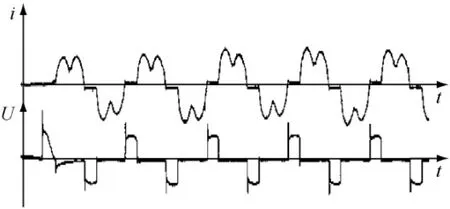
图8 A相晶闸管两端电压和流过电流实测波形
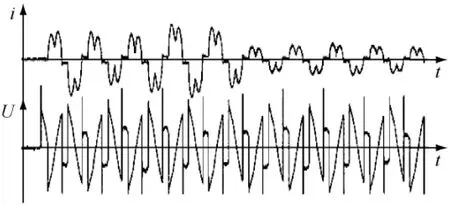
图9 电机A相端电压和流过的电流实测波形
端电压和流过的电流实测波形。因此,在控制系统设计时要采用强弱隔离、电磁隔离、光电隔离等手段保证控制系统顺利工作。
5 结语
基于DSP2407与CPLD的数字式异步电机软起动器具有起动过程可控(恒流、恒功率因数、电压斜坡软起)、功耗低、节能的显著优势。
本文详细介绍了控制器的总体构成、高频脉冲列触发、高压电机漏电检测的实现原理,并通过实际应用和测量证明其所具有的优势。实际应用证明,软起动器具有起动过程平稳、节能效果显著的特点。
[1]陈忠华,刘勋,郭凤仪.模糊自适应 PID控制的异步电动机软起动器的研究[J].电气传动,2010,40(5):49-52.
[2]袁佑新,王亚兰,彭万权,等.基于可变电抗的高压软启动器研究[J].电力自动化设备,2007,27(11):38-41.
[3]Rafael N G,Fernando V V,Angel R V.Mixed-signal fuzzy controller and its application to soft start of the DC motor[C]∥IEEE International Conference on FUZZY System Dublin Ireland,IEEE,2006:128-133.
[4]刘利,王栋,杨润玲,等.电机软起动器节能运行功能及其应用研究[J].电气传动,2010,40(4):11-14.
[5]杨兴瑶.电动机调速的原理及系统[M].北京:水利电力出版社,1995.
[6]王旭光.三相交流调压器的主电路分析[J].电气自动化,1993,5(8):88-89.
[7]岳云涛,韩永萍,王聪.一种基于模糊PD控制的新型中压软起动器[J].中小型电机,2005,32(2):52-56.
[8]宋万杰,罗杰,吴顺君.CPLD技术及其应用[M].西安:西安电子科技大学出版社,1999.
[9]刘子胥,谷志锋,张常勇,等.基于PIC单片机的电机软起动器[J].电气自动化,2004,26(4):40-43.
[10]谷志锋,栗彦辉,刘兵.异步电动机软起动器可靠触发区间的分析与确定[J].仪表技术,2010(4):56-59.