复式行星齿轮传动系统综合动力学模型及振动特性研究
2011-06-02杨富春周晓军郑津洋
杨富春,周晓军,郑津洋
(1.浙江大学 化工机械研究所,杭州 310027;2.浙江大学 机械系,杭州 310027)
与其他行星齿轮传动[1-3]相比,复式行星齿轮传动传动比更多、功重比更高,因此在对结构紧凑性和传动比要求高的场合,如车辆、航空、机械工业等领域尤其是车辆自动变速器领域,获得了广泛应用[4-6]。目前车辆用复式行星齿轮传动多为简单的拉威娜式结构,随着车辆自动变速器从低档位向高档位的快速发展,更加复杂的复式行星传动将获得更多应用。而在实际应用中,行星传动的振动和噪声是影响系统可靠性、寿命及操作环境的关键因素,复式行星传动系统的振动问题较普通行星传动更为严重[5]。因此,建立复式行星齿轮传动系统综合的动力学模型,对其振动特性进行研究具有重要意义。
2001年Kahraman[5]首次建立了双行星轮和三行星轮复式行星齿轮传动的纯扭转振动模型,并分析了其自由振动特性。Dhouib等[6]在Kahraman的基础上建立了双行星轮复式行星传动平移扭转振动模型并对振动模态进行了分类。杨富春[7]建立了含双行星轮的复式行星传动系统多自由度动力学模型,并研究了其固有振动特性。Kiracofe等[8]建立了复合即多级行星齿轮传动系统动力学模型,并对系统的振动模态进行分类和完整性研究。上述研究[5-7]仅针对某一特定结构的复式行星传动进行,未建立复式行星传动综合的动力学模型;Kiracofe等[8]建立的复合行星传动模型中虽然含级联、双行星齿轮,但未考虑变换中心构件时啮合副的方向问题,无法适用于复式行星传动系统的研究。此外,文献[6-9]等对普通行星齿轮传动和复式行星传动固有振动特性的分类仅以中心构件的振动特性进行,未考虑行星轮的振动特点。
本文建立了复式行星齿轮传动综合动力学模型,模型考虑了各构件的平移和扭转振动及静态传递误差。系统分析了复式行星齿轮传动系统的固有振动特性,研究了其固有频率分布特点,根据中心构件及行星轮的振动特点对振型进行了分类。
1 动力学模型
复式行星齿轮传动系统结构多样,根据行星轮特点可分为宽行星轮式(图1(a))、级联式(图1(b))及其组合形式(图1(c))。图1中的结构仅为典型结构,其他结构形式可在此基础上扩展。复式行星齿轮传动各种结构均包含一个行星架、多个中心轮和多个行星轮,其中将结构参数完全相同的一组行星轮称为行星组。以c、gm、pijn表示行星架、中心轮和行星轮,下标m=1,2,…,Ng,i=1,2,…,Nps,j=1,2,…,Np,n=1,2,…,Npt,Ng、Nps、Np、Npt分别表示中心轮数目、行星组数目、每一行星组中行星轮数目及一个级联行星轮中啮合副数目;其中下标j和n可根据情况予以省略。

图1 复式行星齿轮传动结构图(为表达简单,仅给出了称轴以上部分)Fig.1 Structure of complex compound planetary gear set(only parts above axis are illustrated here)
系统中齿轮均为直齿轮,模型中考虑了各构件的两个平移和扭转振动,共3(1+Ng+NpsNp)个自由度。由于系统只有一个行星架,因此系统坐标系选择为随行星架旋转的动坐标系,行星架和中心轮的x轴正方向由行星架理论中心指向任一选定行星轮理论中心,y轴方向由右手法则确定,行星轮平移自由度以η、ζ表示,正方向分别为行星架的逆时针切向和径向。行星架、中心轮和行星轮的扭转自由度θ均以顺时针为正方向。
将旋转坐标θ转换为平移坐标u=rθ,r为各个构架的半径,其中rc为行星架中心到各行星轮中心距离中最短距离,其他行星轮中心到行星架中心的距离与rc的比值设为δR,pij。m表示各构件质量,M表示各构件转动惯量的等效质量M=I/r2,I为各构件的转动惯量,r为半径,其中行星架的转动惯量仅指行星架本身的转动惯量 Ic,行星架的半径为 rc。kcb,x,kcb,y表示行星架与基础间的支撑刚度;kgmb,x,kgmb,y表示中心轮与基础间的支撑刚度;kcgm,x,kcgm,y表示行星架与中心轮间的支撑刚度;kcpij,x,kcpij,y表示行星架行星轮间的支撑刚度;kgmgl,x,kgmgl,y表示中心轮 gm和 gl间的支撑刚度;kcb,u,kgmb,u表示行星架和中心轮与基础间的扭转刚度的等效线性刚度;kgmpijn,kpijnpi'jn表示中心轮和行星轮及行星轮与行星轮间的啮合刚度;以e表示各个啮合副的静态传递误差,下标与啮合刚度下标含义相同。ψpij表示行星轮中心与行星架中心连线和x轴正向沿逆时针方向间的夹角;βpij表示行星轮ζ正方向与相啮合的两行星轮中心连线间的夹角,部分符号如图2所示。Tc和Tgm表示行星架和中心轮所受的外加扭矩。模型中行星架和任一中心轮均可设定为输入、输出和固定构件。啮合刚度按照石川法计算,并将其展成傅里叶级数的形式;同理,将静态传递误差展成傅里叶级数的形式,两者的具体形式可参照文献[7]。
图2给出了中心轮(以太阳轮为例)-行星轮啮合副及行星轮-行星轮啮合副的动力学模型,根据牛顿第二定律得中心轮的动力学方程为:
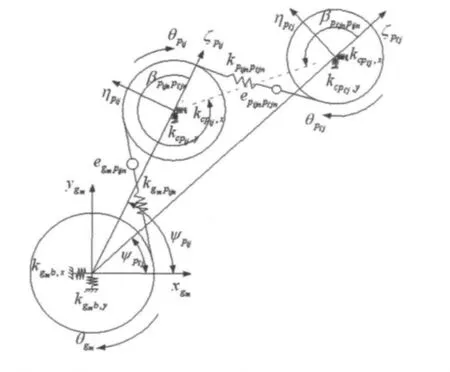
图2 太阳轮-行星轮及行星轮-行星轮啮合副模型Fig.2 Model of sun-planet and planet-planet meshes

同理可得行星架和行星轮的动力学方程为:

式中,αgmpijn,αpijnpi'jn分别表示中心轮与行星轮以及行星轮与行星轮间啮合副的压力角;δu,gmPijn表示级联式结构中与中心轮gm啮合的行星轮pi与行星轮p1的半径比;δu,pi'jnpijn表示级联式结构中与行星轮pi'啮合的行星轮pi与行星轮p1的半径比;

其中,以中心轮、行星轮在啮合线上压缩等效弹簧时的位移为正。
将上式整理可得复式行星传动系统的综合动力学方程为:

式中,M、Kb、Km、q、F 分别表示系统的质量矩阵、支撑刚度矩阵、啮合刚度矩阵、系统的位移向量、激励力向量。该模型适用于宽行星轮式、级联式及其组合形式的直齿复式行星齿轮传动系统。
2 固有特性分析
由式(1)可得到复式行星排的无阻尼自由振动方程为:

与之对应的特征值问题为

式中,K=Kb+Km,ωk、φk分别为系统的第 k阶固有圆频率和振型,k=1,2,…,N。

表1 图1(c)中复式行星齿轮传动系统参数表Tab.1 Parameters of example system
以图1(c)中组合式复式行星齿轮传动系统为例研究复式行星齿轮传动的固有特性,各参数如表1所示,其中 Ng=7,Nps=3。
由于图1(c)以不同中心轮和行星架为输入、输出及固定构件共可获得种功率流,数量较多,因此本文仅以行星架为输出构件,中心轮依次为输入构件,后续中心轮依次为固定构件,共21种功率流为例对其固有特性进行分析,该结构包含了级联行星轮及多行星轮结构形式,具有显著代表性。Np即行星轮个数分别为3,4,5时复式行星齿轮传动系统的特征值,如图3所示。
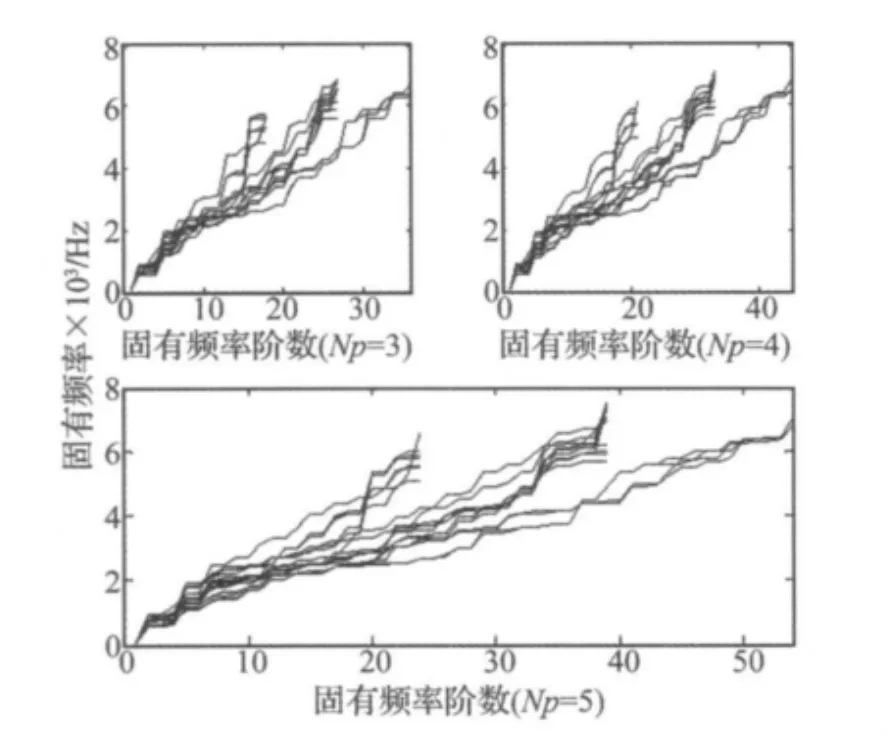
图3 Np=3,4,5时系统固有频率Fig.3 Nature frequencies of system(Np=3,4,5)
由图3可以看出,由于具有多种传动结构,复式行星齿轮传动系统的固有频率呈现带状分布,即同一阶固有频率由于功率流的的改变而不同,其中一阶固有频率为0表示系统的刚体运动。图4为g1输入、g2固定,Np=3,4,5时系统的固有频率及同阶固有频率变化率图,由图可以看出,行星轮数目的增加引起了系统固有频率的变化,其中低价固有频率变化较小,高阶固有频率变化较大。图5为Np=3,21种功率流情况下系统的各阶固有频率,由图可以看出同样行星轮数目情况下,系统功率流的变化将大大改变系统各阶固有频率的范围。以某一阶固有频率中的最大值与最小值的差值与最小值的比值表示固有频率的变化率,从图5右图中可以看出,各阶固有频率的变化率大多大于50%,说明与普通行星齿轮传动相比,复式行星齿轮传动系统设计时要避开共振区域更加困难,因此需综合考虑各种功率流,合理设计系统参数。

图 4 系统固有频率(Np=3,4,5,g1输入,g2固定)Fig.4 Nature frequencies of system(Np=3,4,5,g1 was input,g2 was fixed)
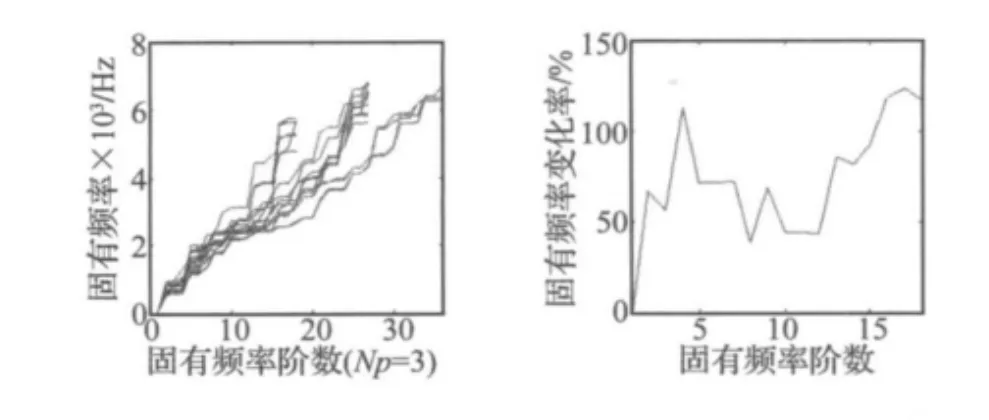
图5 系统固有频率(Np=3)Fig.5 Nature frequencies of system(Np=3)
根据系统特征值的重根数、中心构件的振型特点将复式行星齿轮传动系统的振型分为三类:中心构件平移振动模式、中心构件扭转振动模式和行星轮振动模式;其中特征值为重根的情况对应中心构件平移振动模式或行星轮振动模式,特征值为单根的情况对应中心构件扭转振动模式或行星轮振动模式。以g1为输入,g7固定为例,三种振动模式振型如图6所示(图中横坐标自由度从左到右顺序为行星架、中心轮、行星轮;Np=3中对应的固有频率分别为3阶661 Hz和2阶609 Hz;Np=4中对应的固有频率分别为2阶628 Hz、4阶643 Hz和8阶1439 Hz;Np=5中对应的固有频率分别为2阶601 Hz、4阶662 Hz和8阶1438 Hz)。
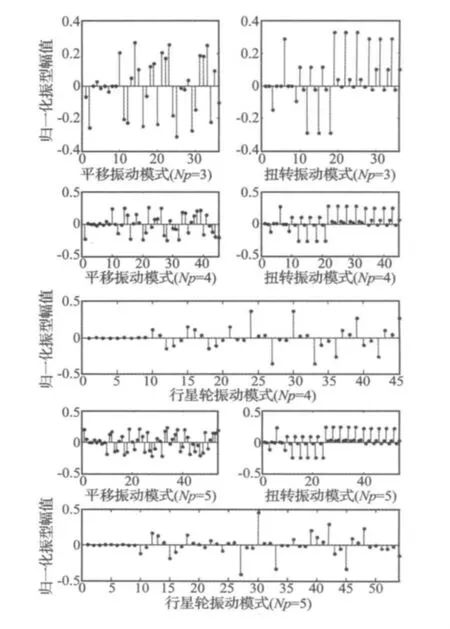
图6 复式行星齿轮传动系统振型Fig.6 Modals of complex compound planetary gear set
上述分类未考虑行星轮的振动特点,从分类完整性角度考虑,需对系统各个构件的振型进行分析,以得到所有构件的振动规律。由图3和图6分析可知,中心构件平移振动模式下,对应的系统固有频率为重根,中心构件无扭转振动,只存在两个平移振动,而各行星轮振型振幅均较大,说明该振动模式下行星轮振动剧烈,但各个行星轮间的振型无明显规律,表现为随机振动特点;中心轮扭转振动模式下,中心构件无平移振动,仅有扭转振动,这种模式下各个行星轮的振动呈现出明显的规律性,即同行星轮组中所有行星轮各自由度的振动方向和振动幅值相同,如图6所示;行星轮振动模式在行星轮个数大于3个情况下存在,该模式下中心构件不存在振动,行星轮个数为4时行星轮振动存在明显的规律性,即同组行星轮中相对的行星轮振动方向和振幅相同,相邻的行星轮振动方向相反,振幅相同如图6所示;行星轮个数为5时,相邻两行星轮振动方向相反,振幅不同,由于行星轮个数为奇数,故有两个相邻行星轮振动方向相同,可将其视为与4个行星轮时规律一致。
因此,在综合中心构件和行星轮振动特点的基础上重新将复式行星齿轮传动系统振型分为三类,即中心构件平移-行星轮随机振动模式、中心构件扭转-行星轮相同振动模式、中心轮静止-相邻行星轮反向振动模式。
3 结论
本文建立了包含级联式、宽行星轮式及其组合式的复式行星齿轮传动系统综合动力学模型,模型考虑了平移、扭转振动及静态传递误差。系统分析了系统的固有频率,指出复式行星齿轮传动系统固有频率呈现带状分布,与普通行星齿轮传动系统相比避开共振区域更加困难,需根据具体结构合理设计系统参数;深入研究了中心构件和行星轮的振型特点,将系统振型分为三类:中心构件平移-行星轮随机振动模式、中心构件扭转-行星轮相同振动模式、中心轮静止-相邻行星轮反向振动模式。本文建立的综合动力学模型及固有特性的研究为复式行星齿轮传动系统参数灵敏度、动态响应、减振降噪等的研究提供理论基础和依据。
[1]刘 文,林腾蛟,李润方,等.新型少齿差减速器动态特性分析及实验研究[J].振动与冲击,2009,28(7):22-27.
[2]杨通强.斜齿行星齿轮传动动力学研究[D].天津:天津大学,2003.
[3]王世宇.基于相位调谐的直齿行星齿轮传动动力学理论与实验研究[D].天津:天津大学,2005.
[4]刘修骥.车辆传动系统分析[M].北京:国防工业出版社,1998.
[5]Kahraman A. Free torsional vibration characteristics of compound planetary gear sets[J].Mechanism and Machine Theory,2001,36:953-971.
[6]Dhouib S, Hbaied R, Chaari F,et al. Free vibration characteristics of compound planetary gear train sets[C].Proc.IMechE,2008,1389-1401.
[7]杨富春.复式行星排动力特性及其止推垫圈磨损特性研究[D].杭州:浙江大学,2009.
[8]Kiracofe D R,Parker R G.Structured vibration modes of general compound gear systems[J].Journal of Vibration and Acoustics,Transactions of the ASME,2007,129(1):1-16.
[9]Lin J,Parker R G.Analytical characterization of the unique properties of planetary gear free vibration[J].Journal of Vibration and Acoustics,1999,121:316-321.
