基于压电智能材料的自适应吸声实验研究
2011-06-02王同庆
唐 俊,王同庆
(北京航空航天大学 声学与流体工程实验室,北京 100191)
在水下,传统阻尼材料对频率较高的噪声能起到较好地吸收作用,但是对于低频噪声就束手无策了。针对低频噪声的主动控制研究是目前的研究热点,它包括主动消声和主动吸声两个方面。主动消声是由德国人Paul Lueg[1]提出的,通过利用次级声源与初级声源两组声源的声波大小相等,相位相反来实现声源的抵消达到降低噪声的目的。而有别于主动消声是对入射声波进行控制,主动吸声方法是对反射声波进行控制,使入射声波的反射系数很小或接近于零,从而达到吸声降噪的目的。
主动吸声通常采用的方法是用一个初级扬声器发出平面简谐声波,在该扬声器的对面布置另外一个次级扬声器,在次级扬声器的表面布置一个振动传感器,用于检测次级扬声器表面的振动速度,在次级扬声器的近前方布置有一个麦克风,用于检测次级扬声器表面的声压。通过调节和控制次级扬声器发出的声波,使得次级扬声器表面的声阻抗与空气的特性阻抗相匹配,吸声系数达到最大,从而达到主动吸声的目的[2~4],而该方法在实际应用中不容易实现的。
本文在分析水声声管中声场分布的前提下,提出了用双传感器技术应用时延控制方法提取参考声信号(此处是入射声波)和误差声信号(此处是反射声波),寻找控制目标函数,将有源吸声思想应用到一种可用于水声降噪的有源复合材料——PVDF压电薄膜复合智能材料上。PVDF是一种柔软的塑性材料,PVDF压电元件对湿度、温度和化学物质高度稳定,机械强度较好,具有结构简单、重量轻、失真小、稳定性高的优点,特性阻抗与水相匹配,是一种比较理想的新型换能材料[5]。PVDF压电薄膜既可以做为传感器,又可以做为作动器。做为传感器时,具有分布式传感器的能力,往往是制作大面积水听器的理想材料;做为作动器时,不但可以承受很高的输入电压而不会被击穿,而且可以剪裁成任意形状以获得很高的平面外法向位移量[6,7]。
PVDF压电薄膜复合智能材料可代替传统有源吸声系统中的次声源——扬声器,用作次级激励源抵消回声信号,与空间内一点的声抵消有源控制系统不一样的是,智能材料的声抵消是在其声学边界上,通过给消声材料施加交变电压信号,可以控制其振动速度,使得消声材料的表面声阻抗和入射声信号的特性阻抗动态匹配,形成一种连续的介质环境,即在消声材料的表面处不会产生反射,从而达到吸收反射声波的目的[8]。
1 自适应算法控制器
自适应滤波算法主要分为LMS和RLS两大类,在振动与噪声控制中,基于横向滤波器的LMS算法是最常用的。
1.1 滤波-XLMS算法
典型的自适应管道噪声有源控制系统原理如图1所示,其中x(n)为参考传感器采集到的源噪声信号,经过ANC控制器产生与x(n)等值反向的次级信号y(n),由y(n)驱动扬声器产生次级声源,与源噪声相叠加实现噪声的抵消,e(n)为误差传感器测量的残差信号,用来调整ANC控制器的输出。

图1 自适应管道噪声有源控制系统原理图Fig.1 The principium of active duct noise control system
对于图1所示典型管道噪声有源控制系统,管道声场条件下的滤波-X LMS算法与自由声场类似[9,10]:

式中,μ为收敛系数;e(n)为误差信号;re(n)为滤波-X信号矢量;s(n)为误差通道脉冲响应;ω(n)为实现算法的FIR滤波器权系数矢量;L为滤波器长度;X(n)为n时刻参考信号矢量。且:

1.2 延迟-LMS算法
在滤波-XLMS算法中,包含了滤波-X信号矢量,因此需要得到次级通道脉冲响应(或传递函数)。次级通道在线建模法对次级通道的估计值较准确,但实现方法较复杂。通道时延估计法是在自由声场或其它以直达声为主的声场中将次级通道简化为时延通道。用人工测量或其它方法获得次级通道的时延估计值。这种方法的优点在于简单易行,利于自适应有源控制的工程实现。
在管道噪声有源控制系统中,可通过理论方法或试验测试法获取次级通道的时延特性,则管道声场条件下的FLMS算法可简化为:
以上算法称为延迟-LMS算法[11]。其中,ks为次级通路的无量纲时延,它表示离散时间域内以采样点为单位的延时点数。
确定次级通路延迟时间的原理图如图2所示,对于特定频率的正弦信号,在示波器上两个通道上会存在一定的相位差φ,根据示波器上测定的相位差可求出延迟时间:

式中,f为给定的正弦信号频率。确定了延迟时间t之后,就可以根据系统采用频率fs确定延迟点数ks。
图2 延迟时间测量原理图Fig.2 The principium of delay time measurement
2 声场延时分离网络
传统的管道噪声有源控制系统通常将参考传感器放置在距离初级声源较近的位置(一般为厘米级)来采集入射声作为参考信号,在次级声源后端放置误差传感器采集透射声作为误差信号[12,13]。而在实际工程应用中,初级声源的位置通常无法直接确定,不能使用这种方法放置参考传感器,因此需要在吸声材料的近声场中提取误差信号和参考信号进行有源控制。而有源消声的管道一般为有限长,在管道的两端均存在声反射现象,在声管中实际存在的声场为驻波场。近距离用传感器直接提取自适应前馈控制系统所需参考信号和误差信号相当困难。
本文采用了如图3所示的一套数字声场延时分离网络,对放置在智能吸声材料前端近场的两个传感器进行时延控制,将声管中的驻波声场进行分离,得到吸声材料反射表面的入射声和反射声。将分离所得的入射声信号与反射声信号可分别作为参考信号和误差信号,控制自适应前馈系统输出激励电压信号给压电智能材料,改变智能材料反射面的表面辐射阻抗,使得该阻抗的特性与水的阻抗特性获得最大程度上的匹配以形成介质的连续性,在消声试件的表面形成一种无反射的边界,从而实现主动吸声控制。
图3 数字声场延时分离网络示意图Fig.3 Digital time delay control system concept for separating acoustical signal
当入射声波频率在截止频率以下时,入射声波为简谐平面声波,则入射声波和反射声波可以分别表示为:

式中:k为波数,ω为声波的圆频率。假设图3中传感器1和传感器2的复数灵敏度(包括幅值和相位)相同,且均为Sp。则传感器1和传感器2得到的电压信号分别为:
则由式(14)、式(15)可以求得智能吸声材料的表面反射系数:

即V4(t)、V5(t)分别为入射信号pi和反射信号pr相关的一组信号,可以分别作为自适应前馈控制系统的参考信号和误差信号。数字声场延时分离方法获取参考信号和误差信号为时域操作,是对实际声场信号进行延时处理计算,不考虑声信号的频率,比传统的相移补偿方式具有更好的宽频响应特性,更适用于宽带噪声控制。
3 PVDF复合智能材料
PVDF复合智能材料是一种新型的,重量轻的激励器,从本质上说是一种扬声器或阻抗匹配器,以往对压电复合智能材料的研究主要包括智能材料的结构设计及其在简单的结构上的有源噪声控制。从整体结构上来讲,压电复合智能吸声材料都是在被动吸声材料内部镶嵌压电材料构成[14,15]。对于PVDF薄膜这种主动材料,被施加一个外部激励电压后,由于主动材料表面应力与其曲率相耦合的结果会产生弯张作动,由薄膜的弯张作动来产生复合材料的体积速度,如图4所示。控制这种弯张作动类似于操作一个普通的扬声器,激励薄膜产生体积速度用以产生声音或震动。
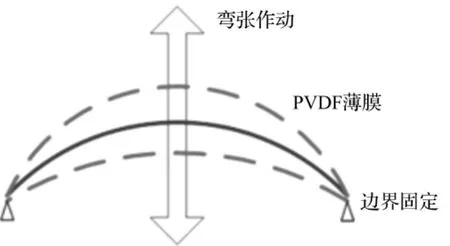
图4 PVDF薄膜激振原理图Fig.4 The principium of the PVDF sheet excitation
本文所用的PVDF复合智能材料由如图5所示的三个部分组成,内部和外部部的聚氨酯泡沫块将PVDF薄膜夹在中间。对PVDF薄膜的两端使用三角尼龙杆进行刚性固定,并在PVDF薄膜极化方向施加预应力,以激发更大的驱动力。
PVDF薄膜采用半圆弧形状设计,整个PVDF薄膜的振动具有同一相位,因此薄膜两面均只需要引出一个电极。组成复合材料的聚氨酯橡胶与PVDF薄膜自身的特性声阻抗与水相匹配。在试验中,将构建好的一块完整的PVDF复合智能材料固定在结构板上,作为次级声源对入射声进行主动声抵消。
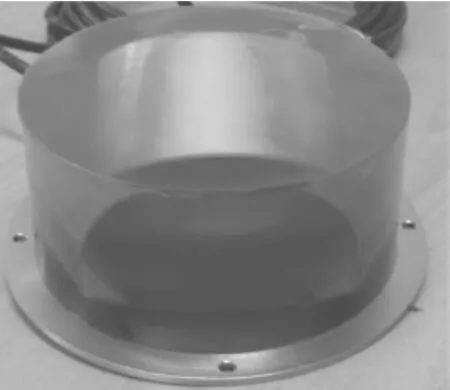
图5 PVDF压电复合智能材料Fig.5 The PVDF piezocomposite smart material
4 控制系统设计
本文所实现的自适应吸声系统主要研究压电智能材料及主动控制方法和LMS自适应滤波算法对入射声波抑制效果。该控制系统主要由高速DSP处理系统、激励材料及其功率放大器、电荷放大器以及低通和带通滤波器等组成。控制系统设计主要包括:硬件设计、LMS自适应控制软件设计等方面内容。
4.1 硬件设计
硬件设计部分主要考虑声信号的采集、处理及控制信号输出等内容,硬件系统结构如图6所示。结构高速DSP处理系统输入通道为12路,输出通道为4路,输入和输出通道均可扩充。输入采用多路转换方式,分为6组,每组通道提供了两个采样保持电路,可实现双通道信号同时采样。系统采用12位的A/D转换,提供70dB,单通道250KSPS转换率的模拟输入通道。输出也采用多路转换方式,D/A转换器为12位。DSP是TMS320F2812,32位的定点处理器,系统的峰值运算能力为150MIPS。DSP板上具有128 kB的Flash存储器,4 kB的引导ROM,数学运算表以及2 kB的OTP ROM,具有相当的应用灵活性。
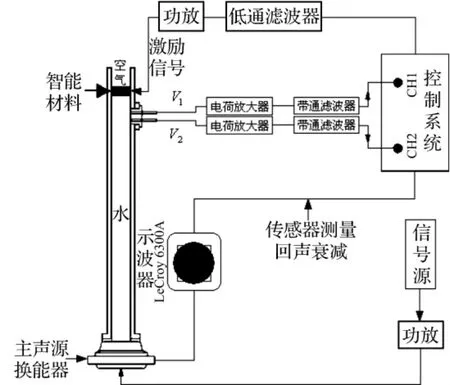
图6 主动控制吸声实验系统结构图Fig.6 The plat of the active sound absorption control system
4.2 软件设计
软件设计部分主要包括编程语言和编译环境选择、LMS前馈自适应滤波算法实现、对DSP数据处理系统的硬件编程三部分内容。根据处理系统对开发语言的要求,编程语言采用ANSI C,编译环境选择了Texas Instruments公司的DSP集成开发环境CCS(Code Composer Studio),这种基于标准C语言的模块化编程环境可以深入硬件结构底层,并具有生成目标代码效率高、实时控制效果好等优点。控制系统采用第2节介绍的延迟-LMS算法,编程中对其步长因子μ值的选择应从小逐渐增大,以协调该算法运行稳定性与快速收敛之间的矛盾,最后根据实际效果确定μ值为0.05,根据实际应用情况,选择了定时触发和中断处理方式,并根据定时触发时间间隔来确定数据采样频率。软件设计流程图如图7所示。
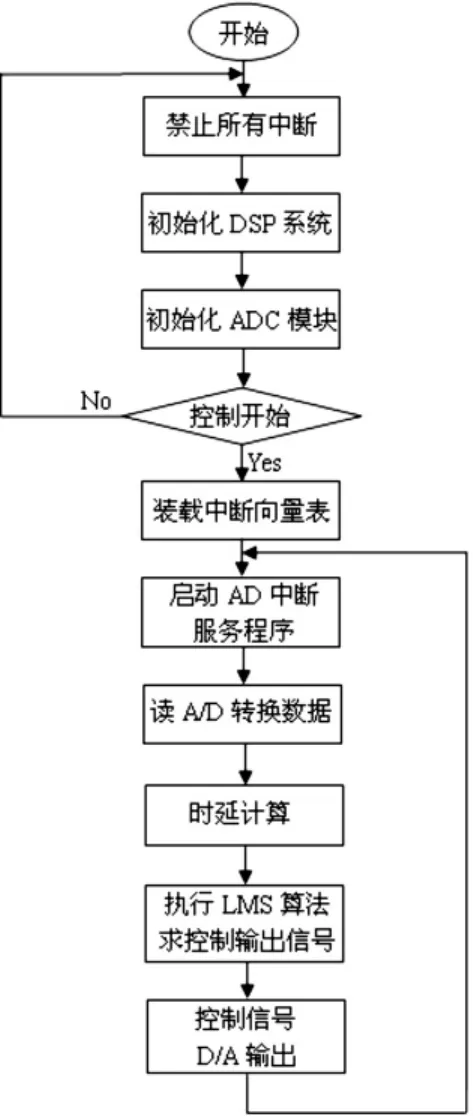
图7 自适应吸声系统软件设计流程图Fig.7 The flow chart of the active sound absorption control system
5 实验结果
5.1 实验装置
在北京航空航天大学声学与流体工程实验室的水声脉冲声管中对水下自适应前馈控制吸声系统进行了实验测量。脉冲声管的管长为 5.0 m,内径60.0 mm,外径 120.0 mm 的不锈钢注水管,压电智能吸声材料的背部为空气软背衬,声反射系数接近于 1.0。由位于声管底部的收发分置主声源发出随机频率的正弦脉冲入射声信号,使用主声源发射换能器的接收传感器探测声波在位于声管顶部的智能材料表面发生的反射,并对智能材料的吸声性能进行评估,并将回声衰减测量结果通过示波器显示。使用位于声管壁面的两个水听器测得材料的复反射系数,然后求得吸声系数。根据传统的反射系数的定义[16]可知:

而吸声系数则为:

由上述定义式可以知道,将入射脉冲和反射脉冲分别作傅里叶变换后,将二者相除,得到复反射系数,并进一步得到吸声系数,并以吸声系数的幅值作为压电智能吸声材料吸声性能的主要评估参考。
用于分离声场的两个水听器安装在声管内壁上,两个水听器的间距为50.0 mm,水听器1据吸声材料表面间距为60.0 mm。当主声源换能器发出平面声波时,传感器1和传感器2的信号经数字延时分离模块处理得到的参考信号x(n)和误差信号e(n)进行自适应控制,由控制器输出激励电压信号至压电智能吸声材料,使得智能吸声材料的回声衰减性能达到最大。
5.2 单频脉冲声吸声实验
主声源输出频率范围为500 Hz~2000 Hz的单频脉冲入射声信号,分别测量不加控制和加控制情况下入射脉冲声波在吸声材料表面的一次反射,并计算出吸声材料反射系数。表1给出了以1000 Hz为中心的7个1/3倍频程频率工况下,智能吸声材料在控制前后的反射系数。

表1 智能吸声材料控制前后反射系数比较Tab.1 The compare for the reflection coefficient of smart foam
图8给出入射声波频率为800 Hz和1250 Hz工况下,控制开启前后智能材料对入射声波的反射情况。
5.3 复合脉冲声吸声实验
使用 LabView 和 NI的 DAQ 系统将4 k、4.5 k、5 k的正弦信号组合成调频复合信号,再将该复合信号截成复合脉冲信号,脉冲宽度为2 ms,脉冲间距为100 ms,由主声源输出,如图9所示。
分别测量不加控制和控制开启情况下入射脉冲声波在吸声材料表面的一次反射,控制开启前后智能材料对入射声波的反射比较如图10所示。

图8 入射声波频率为800 Hz和1250 Hz工况下智能材料控制前后的回声比较Fig.8 Measured waveforms for the smart material with the control system turned off(upper)and on(lower)as functions of time at an incidence frequency of 800 Hz and 1250 Hz
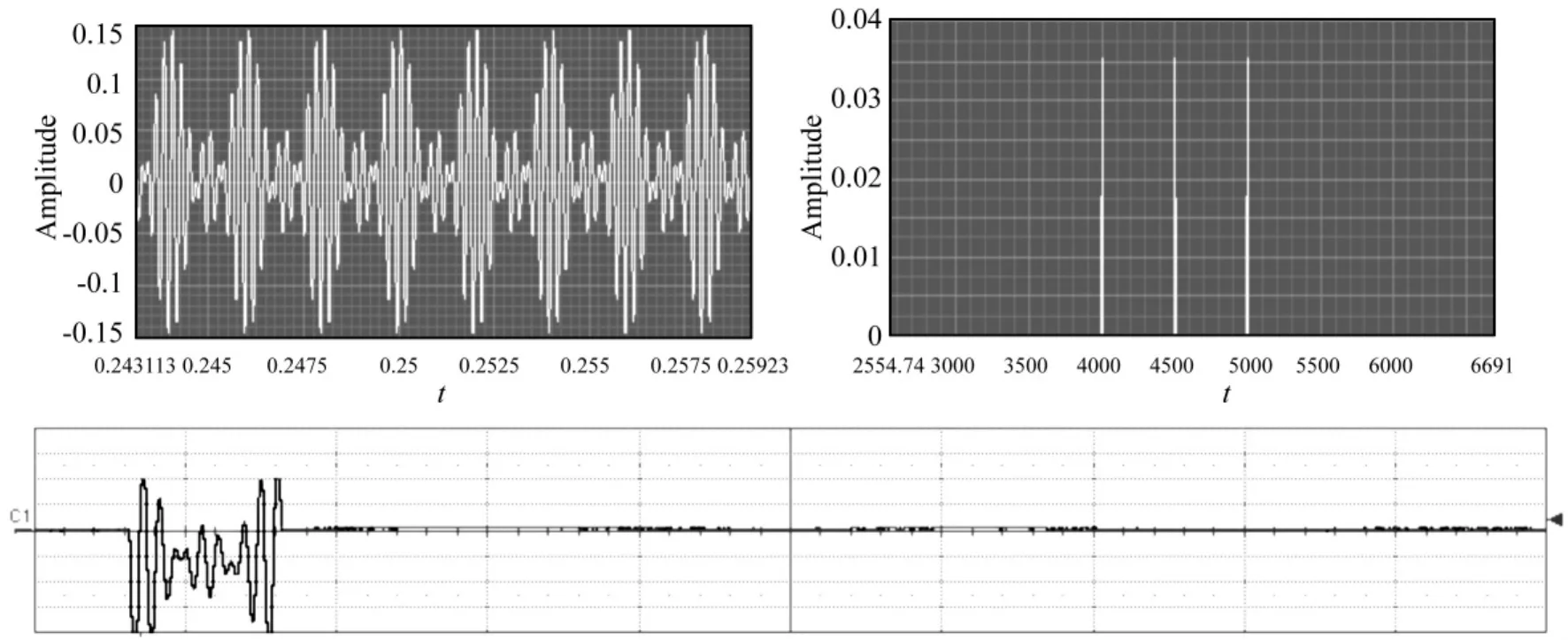
图9 4 k、4.5 k、5 k的正弦信号组合调频复合脉冲信号Fig.9 FM composite sine pulse signal with frequency of 4000 Hz,4500 Hz and 5000 Hz
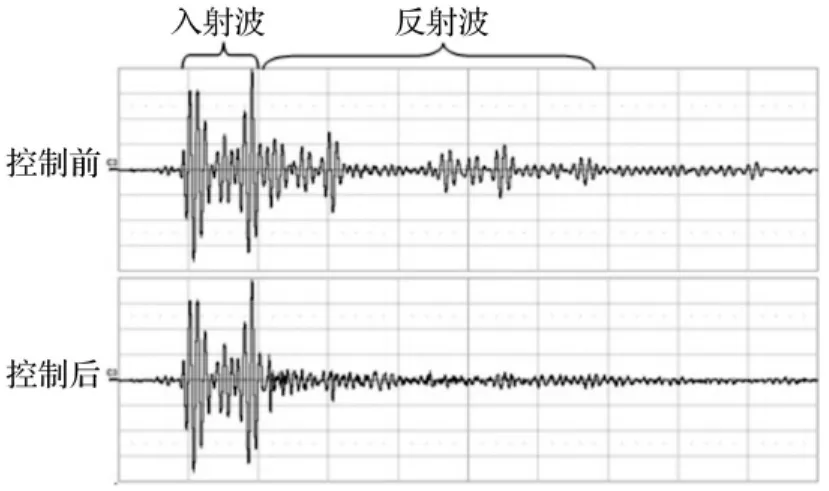
图10 复合脉冲信号工况下智能材料控制前后的回声比较Fig.10 Measured waveforms for the smart material with the control system turned off(upper)and on(lower)as functions of time at an composite pulse incidence.
由表1、图8和图10可知,无论是对单频随机脉冲声还是混合了多种频率信息的复合脉冲声,施加控制前后,智能材料的对入射声的反射都有非常明显的差异,说明该自适应前馈控制系统在较宽的频带范围内具有非常好的有源消声效果。同时位于声管底部的接收换能器智只能检测到极少量反射声压信号,说明控制开启后,在声管中只存在入射声信息,因为反射声压已经被吸收,从而说明了主动吸声理论的正确性。
6 结论
本文提出用PVDF压电智能材料作为水下主动吸声系统中的吸声材料,开发了一套数字时延控制系统,由于该系统采用时域操作,比传统的相移补偿方式具有更好的宽频响应特性,更适用于在较宽的频带范围内对噪声进行控制,并进行了单频随机脉冲声和复合脉冲声主运有源吸声实验验证。通过在脉冲声管中进行的对低频脉冲声的主动吸声控制实验表明,应用压电智能材料进行自适应主动有源吸声控制是解决传统吸声材料对低频声无能为力的有效途径。
[1]Lueg.Process of silencing sound oscillations[J].US Patent,1936,2043:416.
[2]Eghtesadi K,Leventhall H G.Active attenuation of noise-The monopole system[J].Journal of the Acoustical Society of America,1982,71:608 -611.
[3]Swinbanks M A.The active control of sound propagation in long ducts[J].Journal of the Sonud and Vibration,1973,27(3):411-436.
[4]Trinder M C J,Nelson P A.Active noise control in finite length ducts[J].Journal of the Sonud and Vibration,1983,89(1):95-105.
[5]赵东升.PVDF压电薄膜制作传感器的理论研究[J].计算机测量与控制,2005,3(7):748 -750.
[6]具典淑,周 智,欧进萍.PVDF压电薄膜的应变传感特性研究[J].功能材料,2004,35(4):450-453.
[7]赵红平,叶 琳,陆中琪.PVDF压电薄膜在应力波测量中的应用[J].力学与实践,2004,26(1):37 -41.
[8]薛哥林,唐 俊,王同庆.智能消声瓦的声抵消控制系统研究与应用[C].船舶水下噪声学术讨论会,2007,249-253.
[9]Bjarnason E.Analysis of the filtered-X LMS algorithm[J].IEEE Transactions on Speech and Audio Proceessing,1995,3(6):504-514.
[10]孙木楠,一种噪声与振动主动控制的滤波-MLMS算法[J],振动与冲击,2002,21(22):50 -52.
[11]Kim H S,Park Y.Delayed-XLMS Algorithm:An Efficient ANC Algorithms Utilizing Robustness of Cancellation Path Model[J].Journal of Sound and Vibration,1998,212(5):875-887.
[12]陈克安.有源噪声控制[M].北京:国防工业出版社,2003.
[13]于华民,朱海潮,施 引.一种自适应逆控制管道有源消声系统及其实现[J].振动与冲击,2004,23(4):116-118.
[14]Gentry C A,Guigou C, Fuller C R. Smart foam for applications in passive-active noise radiation control[J].J.Acoust.Soc.Am.,1997,101(4):1771 - 1778.
[15]Gentry C A.A Study of Smart Foam for Noise Control Applications[M].Virginia Polytechnic Institute & State University,1998.
[16]孙 亮,侯 宏,董丽英,等.吸声系数管道脉冲法测量技术及其模型研究[J].噪声与振动控制,2008,28(5):173-177.
