民用运输机RVSM航电设备初始适航符合性分析
2011-06-01张琛
张 琛
(上海飞机设计研究院综合航电系统设计研究部,上海 200436)
多年来,民用运输类飞机以300 m垂直间隔在FL290~FL410之间的飞行高度层运营[1]。随着交通密度的增加,已证明这样的垂直间隔成为最繁忙空域的不利因素。因此引入了RVSM,以增加此高度区间的可用高度层数量。在RVSM误差分析中,机型总的误差由飞机设计制造商确定[2],其中航电设备误差(AVE)占了相当大的一部分。
1 航电设备RVSM适航要求
根据AC91-85,某一机型要获得RVSM运行适航批准,其安装的最低设备要求如下:(1)两套独立的满足RVSM性能要求的高度测量系统。(2)一部具有高度报告能力的的二次监视雷达应答机(SSR)。(3)一套高度警告系统。(4)一套自动高度控制系统。
为获得适航批准RVSM运行,对飞机高度测量系统有以下要求[3]:(1)基本RVSM飞行包线,高度测量系统误差平均值 ASEmean≤80 ft(1 ft=0.304 8 m);完全RVSM飞行包线,ASEmean≤120 ft。(2)基本RVSM飞行包线,ASE平均值加上3倍标准偏差值ASE3SD≤200 ft;完全RVSM飞行包线,ASE3SD≤245 ft。(3)自动高度控制系统的高度保持能力精度在±65 ft以内[4]。
2 航电设备
某新型民机的高度测量系统由全静压探头(PSP)、大气数据计算机(ADC)及两者之间相连的管路组成[5]。其高度测量误差可以分为两部分:机身误差和航电系统设备误差。全静压探头的静压端口及其连接的管路是高度测量误差的一个主要来源,其中一部分误差是固定的,可以通过在ADC软件中装订静压源误差修正曲线(SSEC)进行修正。静压测量中的其它误差将通过全静压探头及相关系统的安装和维护程序减至最小。
现今新出厂的机型,航电设备传输的信号均是数字信号,仅有的模/数转换仅发生在用于测量全/静压的大气数据计算机(ADC)内的压力传感器输入端,这部分误差已经考虑在ADC的精度预算中。
2.1 最低设备要求
表1描述了某新型民机的航电设备配置,这是RVSM要求的基本配置。

表1 飞机航电设备配置符合性
2.2 高度测量误差源
图1为高度误差的组成部分。
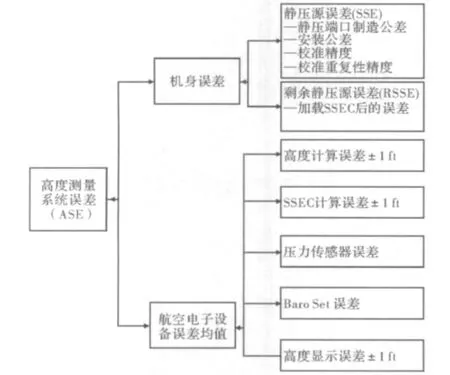
图1 高度误差组成部分
2.2.1 航电设备误差(AVE)
如图1所示,航空电子设备误差主要可分为高度计算误差、SSEC计算误差、压力传感器误差、气压基准设置(Baro Set)计算误差以及高度显示误差。
(1)一般高度计算误差、SSEC计算误差、压力传感器误差,都合并到大气数据计算机(ADC)设备精度中。在RVSM高度层(FL290-FL410),ADC的高度测量精度为±40 ft。
(2)Baro Set用来设置高度显示的气压基准,是一项数字式的计算功能,其设置旋钮的分辨率最小为0.01 inHg或1 mbar(0.01 inHg=1 mbar=100 Pa),导致计算误差最大为±7 ft。在RVSM高度层,一般应使用标准海平面气压设置,直接显示标准海平面气压高度,这样可以忽略Baro Set造成的计算误差。但Baro Set也有可能被飞行员设置为29.92 inHg或1 013 mbar,而不是STD(29.921 26 inHg或1 013.25 mbar),导致有最大7 ft的误差产生。
(3)ADC测得的气压高度,经ARINC 429总线传输到主飞行显示器上显示,在数据传输过程中无任何计算误差。二进制数据编码最多可能造成≤1 ft的误差。
2.2.2 高度控制系统
根据AC 91-85,在没有颠簸和阵风的情况下,直线平飞阶段控制航空器在要求高度±65 ft(20 m)以内。如有高度选择/获取功能,则机组选择的值与输出到控制系统的值之间的差值不超过±25 ft(8 m)。
RVSM要求主飞行显示器(PFD)显示的高度与自动飞行控制系统(AFCS)使用的高度数据之差的绝对值要<25 ft。飞机PFD和AFCS使用的高度参量均来自ADC输出的气压修正高度(Baro Altitude),是同一个数据源,两者之间差值为0,因此能满足RVSM要求。
飞机的高度保持能力取决于航电自动飞行控制设备和飞机控制系统。自动飞行控制系统高度保持能力的设计指标是在30 000 ft以下最大误差为20 ft,在30 000 ft以上最大为25 ft。通过飞机自动飞行系统调参飞行试验,更新自动飞行增益参数,在29 000 ft和35 000 ft高度进行了高度保持性能的验证,验证结果表明能够满足设计要求,也符合RVSM高度控制的要求。
2.2.3 高度告警
根据AC 91-85要求,当显示给飞行机组的高度偏离预定高度一个标称值时,高度偏离警告系统应给出一个告警信号。这个标称值不应大于±200 ft,在应用此标称门限值时,总设备误差不应超过±50 ft。
飞机的高度告警功能在主飞行显示器(PFD)软件中实现。显示器接收ADC发出的高度数据,与飞行控制板(FCP)预设的预选高度进行比较。因为信号之间通信都是通过数字接口,在告警状态的计算中产生的误差≤1 ft。飞机有两套PFD,当飞行高度偏离预选高度200 ft和1 000 ft时,会触发PFD高度告警功能。当一套PFD失效时,将会自动切换使用第二套PFD的高度告警功能。
2.2.4 应答机
AC 91-85要求一部具有高度报告能力的二次监视雷达应答机(SSR)。如果只安装了一部,它必须具有转换到任意一个高度测量系统的能力。按照121部规则实施运行的飞机应当配备有批准的ACAS II机载防撞系统。
飞机安装有2套空中交通管制应答机,为TCAS 7.0版本,满足RVSM要求,并且具有将使用高度源转换到任意一个高度测量系统(ADC)的能力。在S模式下,应答机的分辨率是25 ft;在C模式下,应答机的分辨率是100 ft,与指定高度的偏差AAD主要是由应答机的分辨率引起的。
2.2.5 SSEC分析
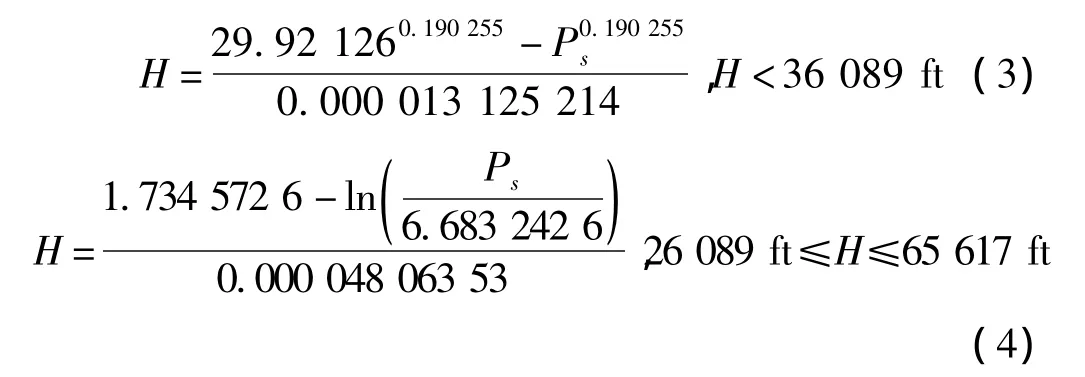
气压高度由机载全静压探头测得的静压加上SSEC修正后计算得出。
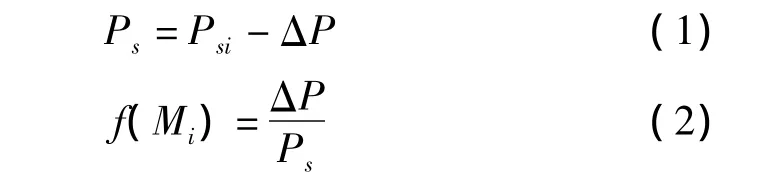
进行RVSM验证的飞机一般通过加装拖锥系统进行试飞验证。SSEC曲线是一组Mi~ΔP/Ps的曲线。其中Mi为ADC计算出的未修正M数。Psi为ADC感受到的全静压探头传输过来的静压,Ps为未经扰动的真实静压。在试飞中将已校准的拖锥静压作为真实静压Ps。相应的计算公式为
高度测量系统数据流走向如图2所示。
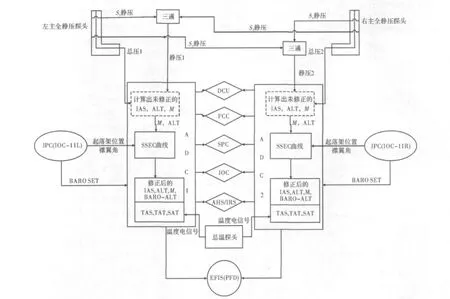
图2 高度测量系统数据流走向
飞机空机重量为29 t,最大起飞重量为43 t,按照RVSM要求,飞行试验验证的重量范围必须覆盖适合RVSM空域运行的所有重量。图3为飞机空速校准获得的原始高度误差,以及在RVSM空域检飞获得的剩余高度误差。
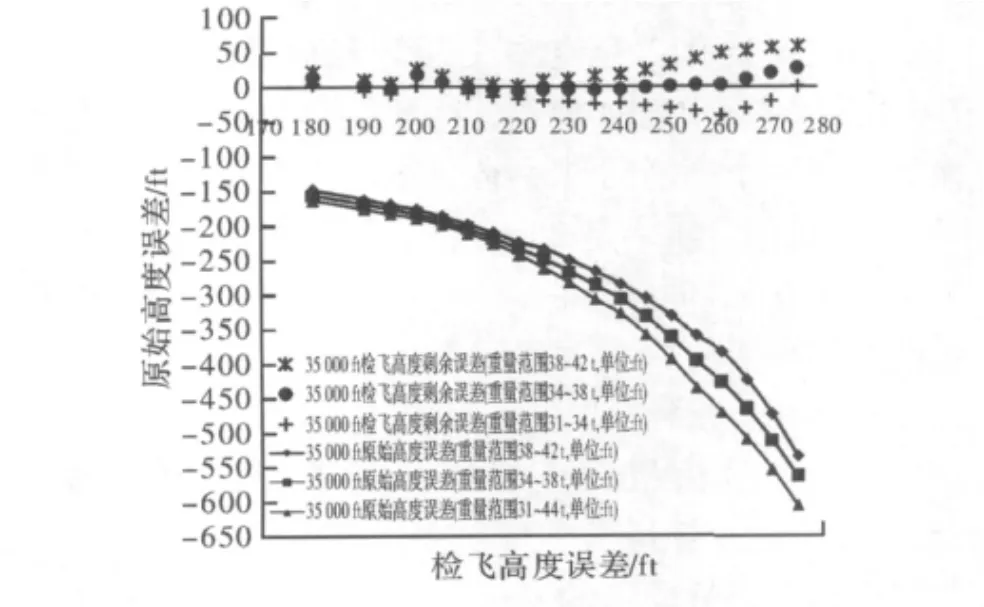
图3 高度误差曲线
从图中可以看出,该机型高度测量系统误差均值ASEmean均符合RVSM要求。综合其它航电设备误差,其3倍标准偏差值 ASE3SD也能满足 RVSM要求。
3 结束语
随着科学技术的发展,越来越多高精度的高度测量设备相继出现,加之全球空管水平不断提高,缩小民机垂直飞行间隔成为可能。对于新设计的民机,申请RVSM批准时,申请人应制定适航批准所需要的表明符合RVSM设备性能要求的数据,对航电设备误差进行分解和预算,从统计的角度获得临界飞行条件下的最大误差数据,表明民机RVSM航电设备初始适航符合性。
[1]ALTITUDE A,MACH N,et al.Table 2 - excerpt airspeed versus impact pressure,form NASA technical note D -822[M].US Dept of Commerce:NASA's Washington Available from NTIS,1961.
[2]NASA U S.Standard atmosphere,1976,NOAA - S/T 76 -1562[S].USA:NASA,U.S.,1976.
[3]International Civil Aviation Organization.ICAO Document 9574- AN/934,Manual on Implementation of a 300 m(1 000 ft)Vertical.Separation Minimum Between FL 290 and FL 410 inclusive[M].2nd ed.USA:International Civil Aviation Organization,2004.
[4]FAA.AC 91 -85 authorization of aircraft and operators for flight in reduced vertical separation minimum airspace[M].USA:FAA UAS Certification Status,2009.
[5]IAN M,ALLAN S.民用航空电子系统[M].范秋丽,译.北京:航空工业出版社,2009.