一种新的二值化方法在车牌检测中的应用
2011-06-01高云杰
高云杰,孙 涵
(南京航空航天大学计算机科学与技术学院,江苏南京 210016)
车牌识别是智能交通系统的关键技术,识别的准确率直接影响到智能交通系统在实际应用中的使用效果。车牌识别广泛应用于停车收费、高速公路收费、违章检测中,并对城市的交通管理起到了明显的改善作用。车牌识别系统主要有以下3个部分:车牌定位、字符分割和字符识别,而车牌定位是基础,关系到后续处理过程,所以车牌定位在车牌识别系统中至关重要。文中主要根据车牌区域边界密集、区域标准差较高的特征,综合该区域的亮度设定阈值进行二值化,最大程度地保留车牌区域,使其在不同光照条件下都能很好地凸显车牌区域,并应用区域融合方法将边界密集的区域融合,运用开运算的数学形态学方法去除图像中的噪声、粘连以及毛刺,最终筛选各连通域,从中找到有可能是车牌的区域,并据此从原图中提取车牌。算法流程如图1所示。
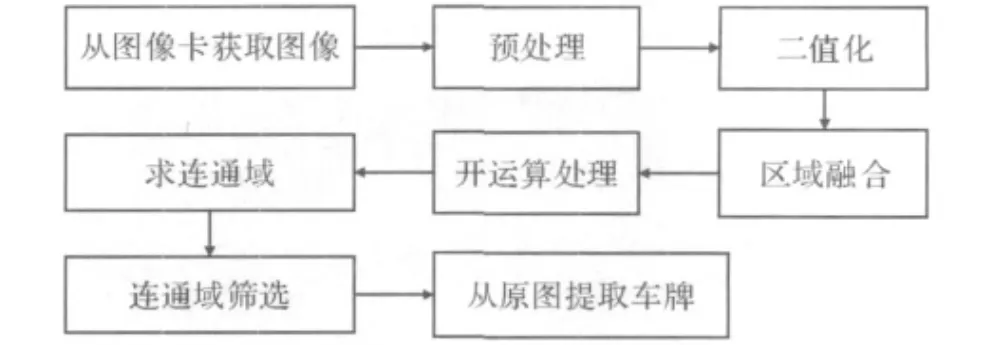
图1 算法流程图
1 预处理
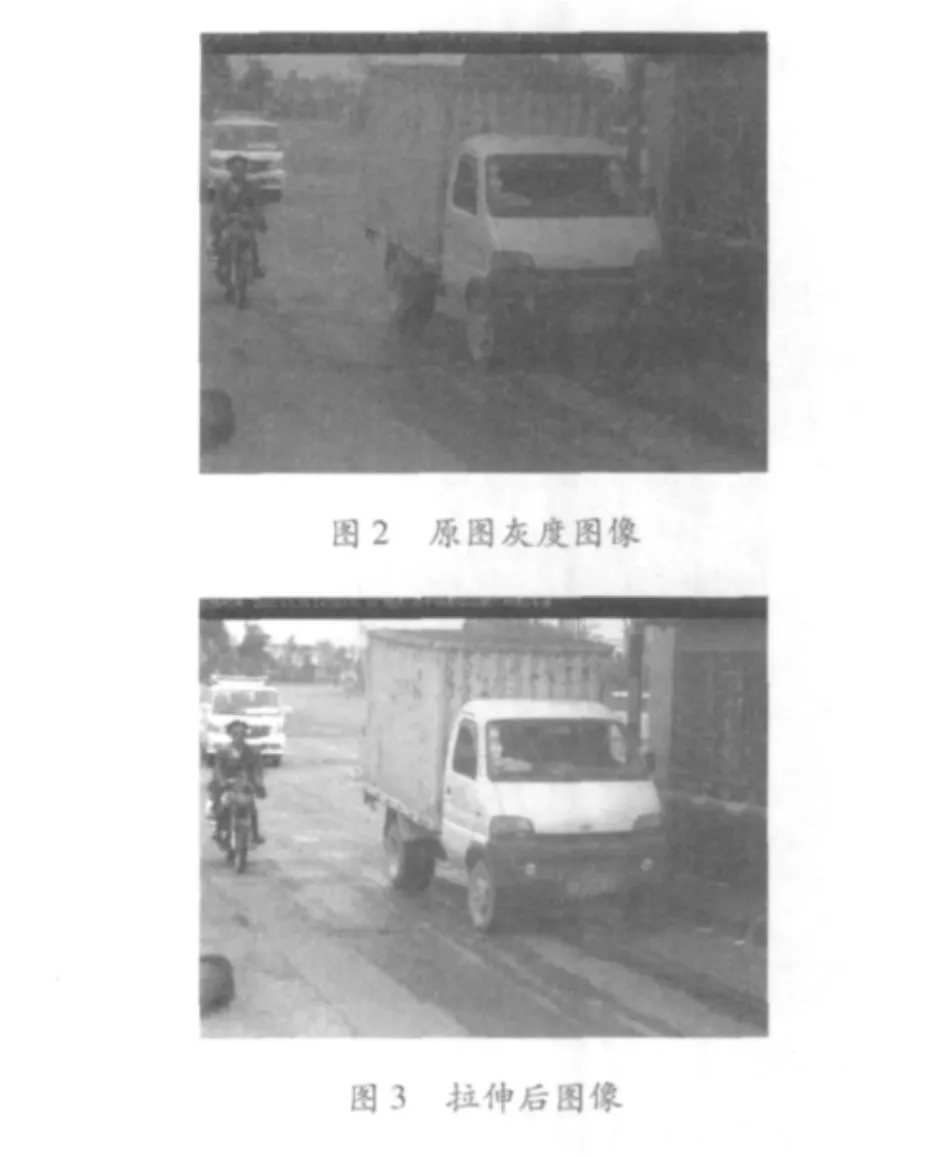
从图像采集卡获得的图像数据通常是彩色的,预处理过程首先对其进行灰度化,再进行灰度拉伸。采用灰度图像处理可以提高检测效率,灰度拉伸可以提高车牌区域的对比度,提升检测率。
由于车牌位于车身的下部中间,属于中间灰度级范围,而车头上部及背景中一些区域一般较亮,属于高灰度级范围。为突出牌照的灰度细节,抑制高、低灰度区域,可利用式(1)对车牌图像进行中间灰度拉伸[1]

假设灰度化后的灰度级范围为Iij∈[a,b],灰度拉伸后的灰度级范围拓展为Iij'∈[a',b'],灰度拉伸效果如图3所示。
2 基于局部特征的二值化方法
由于全局二值化方法可能会造成某些较暗或者对比度低的车牌区域丢失,文中提出了一种新的局部二值化方法,这种二值化方法综合了局部区域的亮度及标准差信息,最大程度地保留车牌区域,实验证明这种二值化方法比普通的先做边缘检测再二值化的方法有明显改进。
2.1 标准差在边缘处理中的应用
考虑到标准差在图像边缘处的特征,文献[5,8]提出并改进了一种基于区域标准差的图像增强算法,用于增强车牌区域的边界梯度值,有着明显的效果,算法公式如式(2)和式(3)所示。
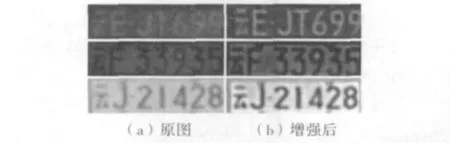
图4 图像增强比较

考虑到标准差在图像边界处的重要特征,文中提出了一种新的自适应二值化方法,这种方法将图像的亮度、区域标准差等信息应用到二值化过程中,起到了明显的作用。
2.2 基于标准差的局部二值化算法
传统基于纹理的车牌检测方法一般是直接对灰度图像进行二值化[1,4],或先做边缘检测,再对边缘图像做二值化[9],这样会丢失原图的一部分信息,如亮度、区域标准差等信息,如果将这些信息运用到二值化过程中能很好地提升二值化的效果。


具体二值化方法如式(5)

采用此方法得到的二值化效果如图5(a)所示。
可以看出,文算法明显突出了边界信息丰富的车牌区域,同时减弱了非车牌区域的边界及噪声影响。大津阈值算法[6]如图5(b)虽然也将车牌区域的边界信息保留,但同时也增强了非车牌区域边界及噪声的干扰。
3 车牌提取
采用数学形态学的方法提取车牌图像,首先进行区域融合,将像素点密集的区域融合为一个整体,再经过开运算去除图像中的噪声、毛刺、及粘连等,最后查找连通域,筛选出符合车牌特征的部分。

图5 二值化结果
3.1 区域融合
由于二值化图像中车牌区域的边界比较密集,文中设计了如下区域算法将边界密度较高的区域合并融合。
根据图像中灰度值为255的点的水平和垂直距离进行融合,如果图像同一行(列)两个值为255的像素点距离<rgnX(rgnY),置该两点之间所有的像素点的灰度值为255,文中取 rgnX,rgnY为11,3。
通过以上处理,可以将车牌区域融合成一个近似矩形的整体,以便接下来的车牌筛选,区域融合结果如图6所示。

图6 区域融合
3.2 开运算
膨胀是在二值图像中“加长”或“变粗”的操作,A被B膨胀,记为A⊕B,定义如式(6)

腐蚀操作“收缩”或“细化”二值化图像中的对象,可以消除图像中的噪声区域、粘连和毛刺等,数学上腐蚀定义为集合运算,A被B腐蚀,记为AΘB,定义如式(7)

先腐蚀后膨胀记为开运算,数学公式如式(8)

使用开运算能够平滑对象的轮廓、断开狭窄的连接、去掉细小的突出部分等[3]。文中采用5×3的矩形算子进行开运算操作。运算结果如图7所示。
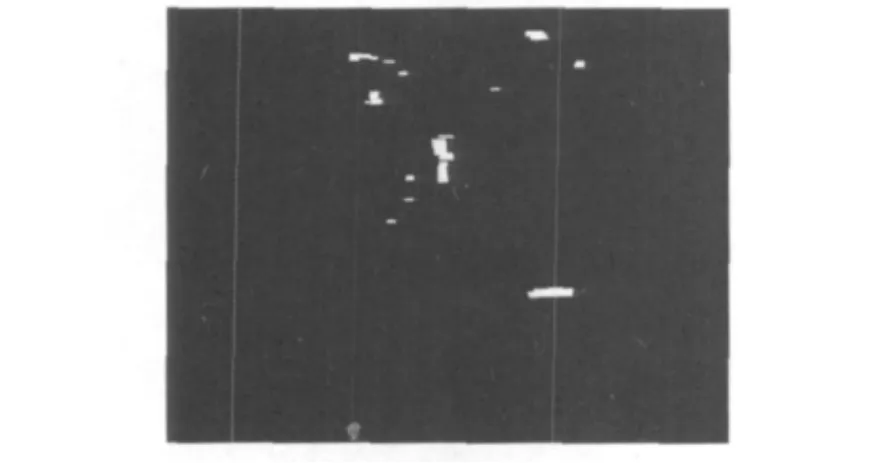
图7 开运算
3.3 求连通域
目前提取目标常用的方法是基于目标轮廓的链码跟踪算法。链码是图像处理中基本描述手段,其特点是用一系列有特定起始点、长度和方向的线段来表述边界,常用的链码有4-链码和8-链码[10]。由于文中需要计算各连通域的面积,即像素灰度为255点数,采用如下方式计算连通域,用于提取目标。
用标志位Flagij表示(i,j)点是否已经访问过;0表示未访问;1表示访问过;index表示连通域编号,Topindex,Bottomindex,Leftindex,Rightindex表示连通域 index的外接矩形信息;Areaindex表示连通域index的面积。
(1)初 始 化 Flagij,index,Topindex,Bottomindex,Leftindex,Rightindex,Areaindex为 0,初始化队列。
(2)从左到右,从上到下搜索图像,找到Flagij为0并且灰度为 255 的点(i,j),将 Flagij置为 1,index 加 1,Areaindex加 1,设置 Topindex,Bottomindex为j,Leftindex,Rightindex为i,并将此点(i,j)加入队列,进入第2步,如果搜索至图像末尾,结束搜索。
(3)如果队列不为空,头结点(i,j)出队列,Flagij置为1,Areaindex加 1,调整 Topindex,Bottomindex,Leftindex,Rightindex的值:Topindex=min(j,Topindex),Bottomindex=max(j,Bottomindex),Leftindex=min(i,Leftindex),Rightindex=max(i,Rightindex)。搜索(i,j)点3×3邻域内的点,如果Flagij为0并且灰度为255,将其加入队列,循环第2部直至队列为空。
(4)如果队列为空,返回第2步。
至此连通域搜索结束,并得到了连通域的外接矩形、面积等信息,供下一步筛选使用。
3.4 筛选连通域
根据车牌大小设定连通域筛选的判定准则,如果某连通域的宽高比、宽高值及连通域面积符合要求,将该连通域添至车牌区,规则设置如下:
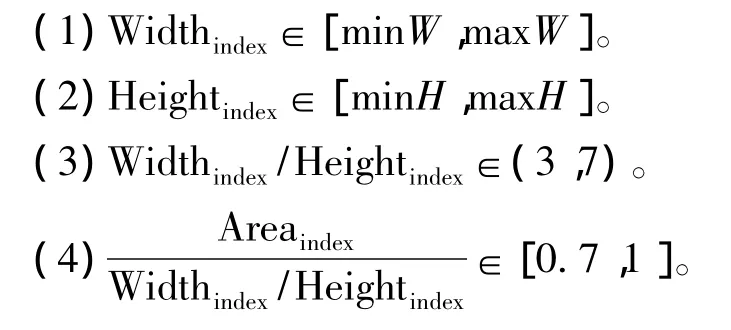
其中 Widthindex=Rightindex-Leftindex,Heightindex=Bottomindex-Topindex,minW,maxW,minH,maxH分别为车牌区域最小和最大的宽与高。
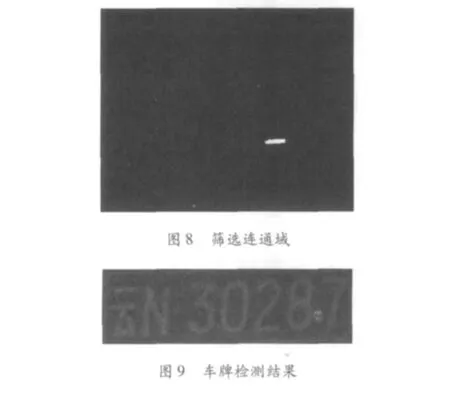
筛选连通域后的结果如图8所示,根据连通域信息提取到的车牌图像如图9所示。
4 实验结果
部分实验结果图像如图10所示,文中算法对不同光照、对比度、倾斜角的车牌有较好的鲁棒性。
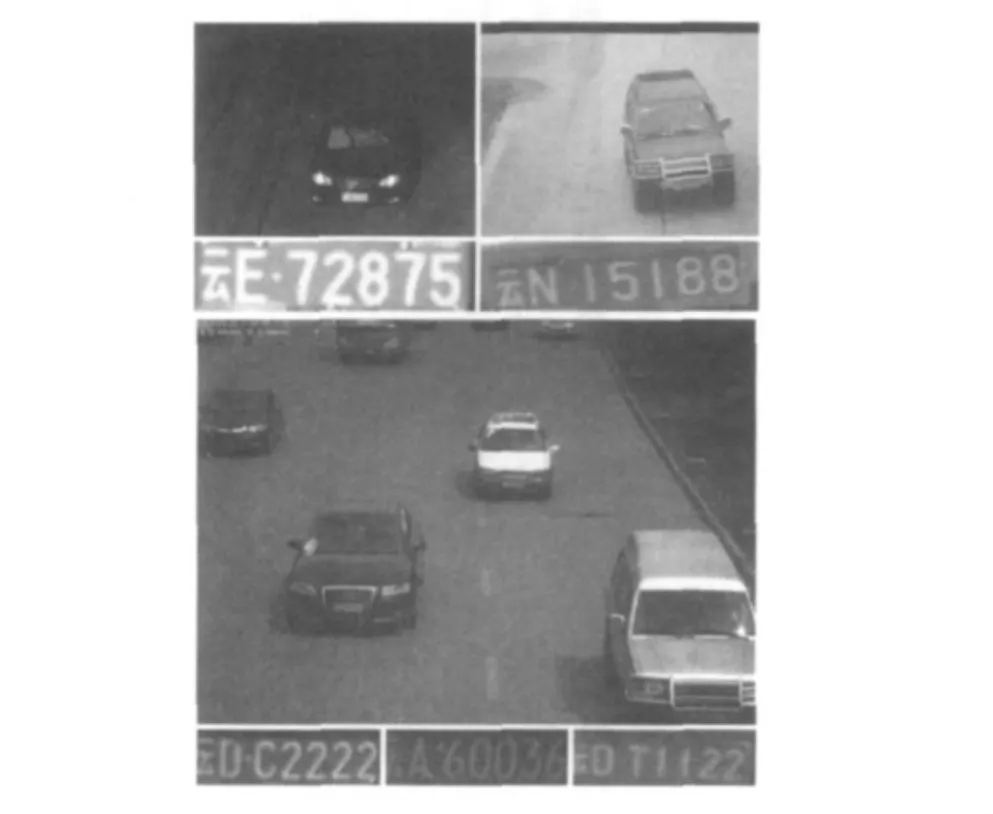
图10 车牌提取结果
实验采用的图像库有1 214幅图像,其中共有1 554个车牌,图像大小为1 600×1 264,为提高检测效率,将图像抽样成为800×632大小进行检测。使用本算法共检测到1 462个车牌,检测到的车牌中有67个检测区域过大或偏移,漏检92个,算法检测率为94.1%。由于文中所使用的图像库包含了各种光照条件及车牌模糊严重等情况,导致检测率有所下降。总体来说,提出的车牌检测中的自适应二值化算法及区域融合定位算法能够很好地定位车牌。
5 结束语
提出了一种根据图像区域亮度和标准差设定阈值的自适应二值化算法,很好的保留了车牌区域,为后序处理做了一个良好的基础。接下来根据数学形态学的方法从图像中提取车牌,由于二值化部分处理的精确,得到了很好的检测效果,但由于提出的自适应二值化算法在噪声处理上没有做出更好的优化,可能导致车牌区域定位得过大,影响检测效果,同时也可能将一些边界丰富的区域误检测成为车牌区域,这是今后需要进一步研究和改进的。
[1]蒲东兵,赵大伟,赵东来,等.一种快速车牌定位算法[J].微型电脑应用,2010,26(4):42 -44.
[2]黄剑玲,邹辉.边缘检测算子在汽车牌照检测中的研究[J].图像处理,2007,12(3):303 -305.
[3]阮秋琪.数字图像处理[M].北京:电子工业出版社,2009.
[4]姜谊,严京旗.车牌定位及倾斜校正方法[J].微型电脑应用,2010,26(4):45 -47.
[5]VAHID A,ALIREZA A.An edge-based color-aided method for license plate detection[J].Image and Vision Computing,2009,27(8):1134 -1142.
[6]OTSU N.A threshold selection method from gray- level histogram[J].IEEE Transactions on Systems Man and Cybernetics,1979,SMC -9(1):62 -66.
[7]SHYANG L,CHANG Lishien,CHEN L,et al.Automatic license plate recognition[J].IEEE Transactions on Intelligent Transportation Systems,2004,5(1):42 -53.
[8]ZHENG Danian,ZHAO Yannan,WANG Jiaxin.An efficient method of license plate location [J].Pattern Recognition Letters,2005,26(9):2431 -2438.
[9]ZHANG Xiangdong,SHEN Peiyi.A license plate recognition system based on tamura texture in complex conditions[C].Harbin:IEEE International Conference on Information and Automation,2010:1947 -1952.
[10]REN Mingwu,YANG Jingyu,SUN Han.Tracing boundary contours in a binary image[J].Image and Vision Computing,2002,20(2):125 -131.