鱼雷稀疏阵高分辨目标声成像方法
2011-05-27樊书宏王英民康文钰
樊书宏, 王英民, 岳 玲, 康文钰
鱼雷稀疏阵高分辨目标声成像方法
樊书宏1,2, 王英民1, 岳 玲1,2, 康文钰1,2
(1. 西北工业大学 航海学院, 陕西 西安, 710072; 2. 中国船舶重工集团公司第705研究所, 陕西 西安, 710075)
鱼雷目标声成像和图像制导是鱼雷在现代复杂水声对抗战场条件下实现准确目标识别和智能化精确制导的最有效途径。为了实现鱼雷图像化目标识别和精确图像制导, 针对鱼雷应用特点, 研究了鱼雷利用预成空间密集窄波束实现高方位分辨、同时利用各窄波束宽带信号处理实现高距离分辨的目标声成像方法, 提出了鱼雷声成像高频非均匀复合稀疏阵及其波束形成方法, 分别给出了宽带信号高距离分辨成像处理方法和基于双阈值分割及模糊聚类的目标声图像优化处理方法, 有效实现了空间方位和距离高分辨的鱼雷目标声成像。该方法大大减小了硬件规模, 易于工程实现。计算机仿真和水池试验结果表明, 该鱼雷目标声成像方法可以有效获取目标声图像, 并具有很高的方位和距离分辨能力。
鱼雷; 稀疏阵; 水下声成像; 目标识别; 水声对抗
0 引言
现代鱼雷实际面临的作战目标十分复杂。一方面, 各种诱饵和干扰器材不断发展, 不仅模拟目标特性的电声处理能力不断提高, 而且出现了拖曳线列阵等新型目标模拟装置。另一方面, 潜艇等水下目标抗爆炸和抗毁伤能力大大提高。同时, 现代海战一般是大型航母战斗群的集群作战, 鱼雷自导检测扇面内呈现出明显的多目标特征。因此, 鱼雷须进一步提高真假目标识别能力, 而且具有对不同目标或目标不同部位准确分辨能力, 以有效打击重要目标并选择攻击目标重点部位[1]。
由于目标图像可以反映最直观、最全面的目标信息, 因此水下目标声成像是水下目标识别的最有效方法[1]。图像制导因其具有制导精确、抗干扰能力强等无可比拟的优势也成为提高制导武器目标识别和精确制导能力的有效途径。对于水下目标, 目标体结构的空间分布及其形状尺度特征是各种声诱饵和干扰对抗器材很难用电子方法模拟的目标本质特征。实践证明, 目标尺度识别是最为有效的目标识别方法。
因此, 鱼雷在末制导阶段通过高分辨目标检测信息处理, 有效获取工作扇面所有目标特征信息, 构建目标结构空间分布的全景式声图像, 根据目标图像准确识别真假目标, 优选重点目标, 有效识别目标具体部位, 精确攻击目标关键部位, 可极大提高鱼雷多目标分辨、智能化识别和精确制导能力。

1 鱼雷预成密集波束目标声成像
与水下成像声纳目标成像不同, 鱼雷利用声成像方法进行目标识别和精确制导, 其成像目的不同于一般声纳成像近距离条件下很精细的目标分辨率, 而在于相对较远距离条件下有效提取目标物理结构的空间分布特征。
鱼雷声成像的应用条件具有以下主要特点[3]: 1) 鱼雷处于高速运动中; 2) 目标运动规律未知,处于随机机动中; 3) 大视角自动目标声成像; 4) 声成像基阵受限于鱼雷有限物理孔径; 5) 声成像系统硬件规模和复杂度受限于鱼雷有限空间和可承载能力; 6) 高实时性的成像算法满足鱼雷单周期目标检测体制要求。鱼雷声成像这些应用条件和特点使得现有多种声纳成像方法难以直接应用。
鱼雷预成密集波束目标声成像是可应用于鱼雷目标识别的声成像有效途径之一, 基本原理如图1。

图1 鱼雷基于预成密集波束的目标声成像方法
图1中, 当鱼雷跟踪目标到一定距离开始声成像目标识别时, 通过声成像基阵发射宽波束信号覆盖目标空间, 并接收目标回波, 在鱼雷检测扇面内同时形成覆盖目标空间的密集接收波束。鱼雷通过对各个窄波束信号进行高分辨距离成像处理, 可以获取检测扇面内各个方向不同距离处目标结构的空间分布情况, 有效构建目标方位-距离分布声图像。该方法稳健性强, 可以适用于鱼雷高速运动和目标随机机动的应用条件。
2 非均匀复合稀疏阵波束方位分辨
2.1 鱼雷声成像高频非均匀复合稀疏阵
相同阵列孔径条件下, 提高工作频率, 有利于减小波束宽度, 改善空间方位分辨率。因此, 鱼雷声成像系统可在保证一定成像距离的条件下, 适当提高成像工作频率。但是, 如果采用一般鱼雷自导阵元间距半波长或一个波长的均匀平面阵, 由于成像频率高, 对应波长小, 阵元数和信号处理通道数将增加, 复杂的硬件规模将极大影响鱼雷声成像的工程实现的可行性。
研究中采用了一种鱼雷声成像高频非均匀复合稀疏阵[3]。鱼雷在水平或垂直平面形成密集波束时, 该基阵等效原理模型如图2所示。
图2中, 设基阵工作中心频率对应的波长为, 基阵分别由阵元数1、阵元间距1=2和阵元
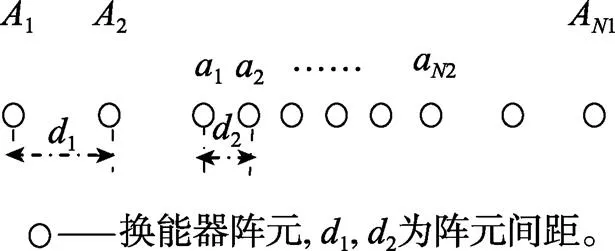
图2 非均匀复合基阵原理模型
数2、阵元间距2=/2的2个子阵复合而成。两均匀子阵具有相同等效声阵中心, 中间部分阵元共用, 组成总体上非均匀鱼雷声成像复合基阵。
2.2 非均匀复合阵波束形成方法
以频率为的信号说明非均匀复合阵波束形成基本方法。设为平面波入射方向,为单个换能器接收信号幅度,为信号角频率,1为相邻阵元接收信号间的相位差,01为相邻阵元之间插入延时附加的相移, 对于阵元数1、间距1=2均匀阵, 其0方向波束输出为[4-5]
对于中间阵元数2、2=/2的均匀阵, 其0方向波束输出为

式中:D为两子阵参考点接收信号的相位差。
根据1(,),2(,)的输出结果, 进行乘积复合处理, 总的波束输出为
式中: |2(,)|为信号2(,)的包络。将幅度归一化, 可以得到基阵在0方向的指向性函数为
由式(4)可见, 当=0时, 各阵元的接收信号同相叠加, 波束输出最大。当¹0时, 波束输出减小。
2.3 波束分析与仿真
根据式(4)0方向指向性函数, 令

可得唯一解

因此, 波束不会出现栅瓣。
选取声成像系统工作中心频率=100 kHz, 声速=1 500 m/s。同时, 如果取1=21,2=17, 则共需要33个信号接收处理通道。
设波束的半功率点方向为, 波束的锐度角方向为, 则分别由

可解得»0.6°,»1.36°。
因此, 0°方向主波束-3 dB波束宽度为

0°方向主波束的方向锐度角为

0°波束图仿真结果见图3。由图中可知, 主瓣指向性准确, 波束无栅瓣, 鱼雷声成像高频非均匀复合稀疏阵是可行的。

图3 0°波束图仿真结果
3 基于宽带信号处理的距离分辨
3.1 宽带信号处理距离分辨原理
声成像系统采用宽频带信号可大大提高距离分辨率, 当距离分辨率很高时, 从大尺度目标(如潜艇等)接收到的不再是“点目标”回波, 而是沿距离分布开的1D距离像[6]。
根据目标声散射的“亮点”模型理论, 目标回波信号是目标体上多个声散射亮点子回波线性叠加的结果。鱼雷声成像系统采用时宽较大的宽频带信号(如线性调频信号), 通过脉冲压缩, 强散射点的子回波表现为尖峰。在平面波的条件下, 目标回波内众多散射点子回波的窄脉冲分布构成目标各散射点投影到鱼雷波束方向的距离像。目标1D距离像的波形随视角缓慢变化。然而, 当同一距离单元中有多个散射点子回波作向量和时, 尖峰的幅度可能是快变的。这种目标多散射亮点回波窄脉冲沿距离向分布构成1D距离像, 以及距离像随视角变化而具有的峰值位置缓变性和峰值幅度快变性, 可作为鱼雷目标特性识别的基础[6]。
设鱼雷声成像系统发射线性调频信号, 带宽, 脉宽, 中心频率为f, 调频斜率为=/, 信号具体表达式为

其中

基带线性调频(linear frequency modulation, LFM)脉冲信号为

其对应的频谱为

采用相关处理的匹配滤波方法对上述LFM信号进行脉冲压缩处理, 可以得到

()的-3 dB主瓣宽度为

因此, 采用宽带信号相关处理方法的目标成像距离分辨率为

由此可见, 对于不同距离处的目标亮点, 可以通过宽带信号相关处理进行分辨。
3.2 宽带信号距离分辨成像仿真
假设目标潜艇长度100 m, 艇体上6个声散射亮点均匀分布, 鱼雷距离目标1 000 m, 攻击舷角60°。鱼雷发射LFM信号,=100 ms,=20 kHz。则鱼雷发射信号以及接收到目标各声散射亮点的子回波信号分别如图4所示。图中, 最上端信号为发射信号。根据发射时刻鱼雷与目标的相对位置, 目标各亮点分别分布于970~1 030 m不同距离处, 其反射子回波分别具有与其距离对应的时间延迟。图中,各小图纵坐标均表示亮点回波,横坐标均表示时间。
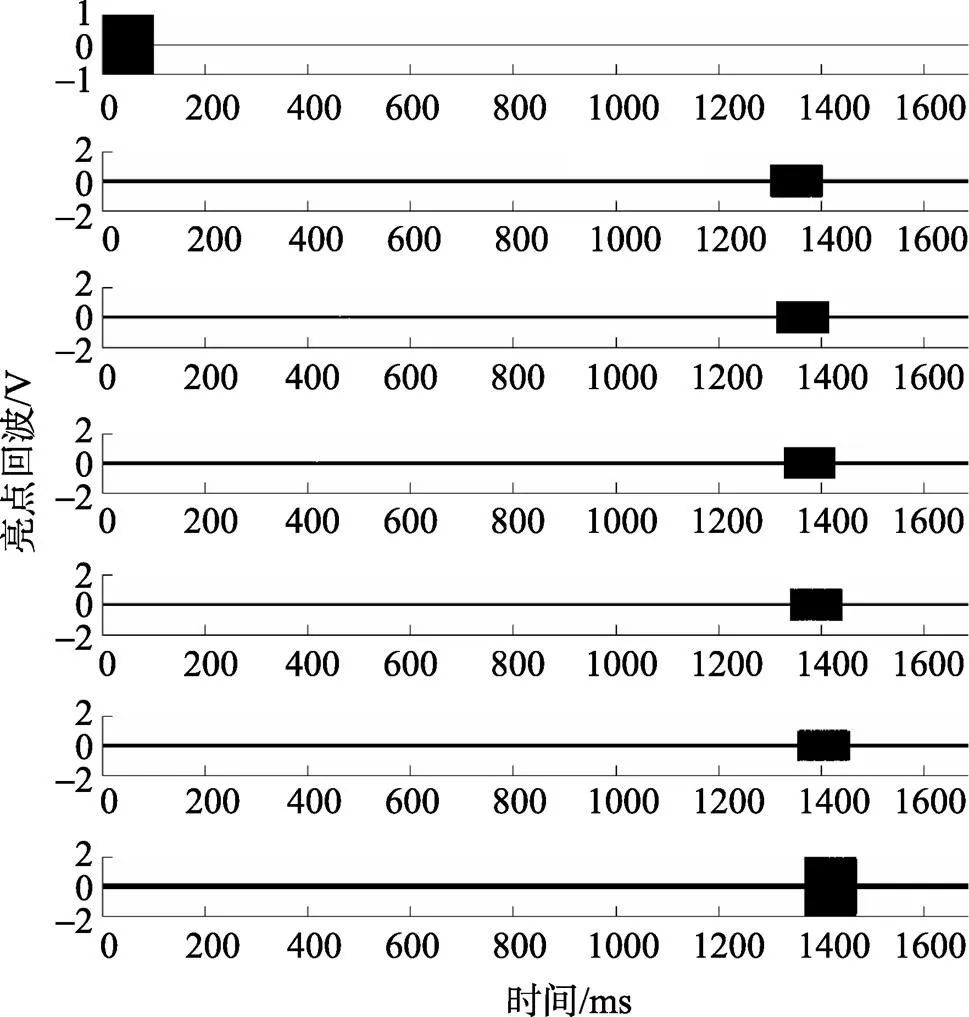
图4 发射信号及接收的各亮点子回波信号
目标总回波信号为各亮点子回波信号的迭加和, 如图5所示。图中, 目标各亮点子回波信号迭加在一起, 难以分辨。

图5 目标总回波信号
图6给出了目标各亮点的实际位置以及距离分辨成像处理得到的目标距离像。
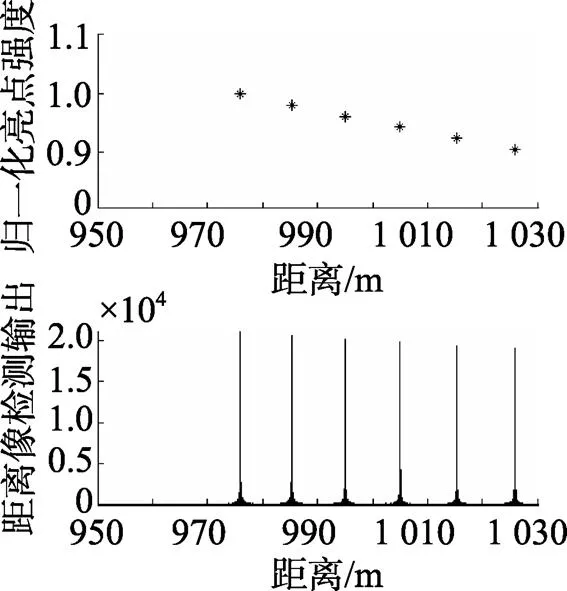
图6 目标各亮点位置及其距离像
图中, 上图给出了目标各亮点的实际位置关系, 可见各亮点距离依次增大, 信号强度依次降低。下图给出了目标各亮点距离像, 可见目标各亮点对应实际距离位置处均出现峰值, 目标距离像清楚分辨出了目标体上所有亮点, 显示了各亮点精确距离坐标。
4 目标图像优化处理
水声信道具有时变、空变的复杂特性, 海洋环境中实际获取的目标声图像经常受到多途、混响以及各种海洋环境噪声的影响, 存在着较严重的干扰, 与光学图像相比分辨率低, 一般不能直接用于目标分辨和识别, 需要进行适当优化处理。
水声图像处理一般包括图像平滑、增强、恢复、边缘检测和分割等图像操作, 从图像中提取有用测度、数据或信息, 使鱼雷可以根据目标声图像自动完成目标识别和选择攻击。研究中采用了基于双阈值分割和模糊聚类的图像优化处理方法。
首先采用双阈值1和2(1<2)实现图像分割, 通过髙阈值2选择目标的亮区, 再通过选择髙于低阈值1和与亮区相邻的次亮区, 亮区和次亮区整个区域即为目标区域。同时使用2个阈值可以较好地把背景与目标分割开来。在此基础上, 采用聚类分析方法实现进一步图像优化处理。聚类分析是研究“物以类聚”规律的一种多元统计方法。基于原始数据的标准化变换, 采用距离系数作为分类统计量, 两样本距离越近, 相似性越好, 距离越远则相似性越差。
设目标图像各像素点的灰度值分别为x,=1,2,…,, 凝聚点重心分别为X和X, 模糊聚类的距离计算式为

在模糊聚类过程中, 凝聚点重心坐标随不断加入该类新元素的值而持续更新, 这样通过循序渐进的图像处理过程, 可实现目标信号和干扰背景的有效分离, 达到目标图像优化处理的目的。
5 水池试验
5.1 试验条件
为了测试目标声成像系统对位于同一工作扇面内不同声源的成像与分辨性能, 采用了如图7所示的试验系统。在消声水池中, 利用随机布放的多个不同发射换能器分别代表目标体上处于不同空间位置的声反射亮点。各发射换能器与声成像基阵均位于水下同一深度处, 与声成像基阵中心的距离为。信号源信号经过功率放大后通过水密电缆传输给各发射换能器发射出去, 作为目标声源。声成像基阵接收目标声源信号, 并经过固定增益放大后通过水密电缆传输到模拟信号处理机。根据声源信号强度完成可变增益放大和滤波后, 由信号采集系统进行信号A/D转换。最后对转换的数字信号进行目标声成像数据处理。

图7 声成像水池试验系统示意图
5.2 试验结果
试验中, 分别对图8(a)所示的斜线形声源目标和图8(b)所示的三角形声源目标进行了声成像试验。图8(a)和(b)中分别示出了不同点目标声源的相对位置关系, 其中,123分别为点目标声源,1234分别为相对距离。

图8 不同分布的试验目标模型
试验中分布目标的各具体参数如表1所示。
试验中, 分布目标几何中心与声成像系统接收基阵等效声中心平均距离约4.0 m, 发射信号为LFM信号, 脉宽=2 ms, 带宽=6 kHz, 中心频率f=112.5 kHz, 采样频率f=50 kHz。

表1 试验分布目标的实际参数
图9给出了试验中采集的单通道实信号时域波形及其频域分析结果。由图可见, 目标声源信号的时域延迟、脉冲宽度等与实际目标位置一致, 频域波形正确。
图10给出了图9所示该通道信号经数字处理后获取的复基带信号时频域波形。
图11显示了基于图10各通道复基带信号形成-60°~60°检测扇面内密集波束进行目标声成像的方位分辨结果。由图可见, 目标声源所在方位的波束输出明显高于无目标声源方向的波束输出。而且, 目标声源的强度越大, 该方向波束输出越高。

图9 试验采集单通道实信号时频域波形
图12显示了试验中对第1个目标亮点所在波束利用信号相关处理进行目标声成像的距离分辨结果。试验中, 第1个目标亮点声源实际位于-14°方向波束, 其距离最近, 实际距离约为3 m。由图可见, 该波束经相关处理后, 在3 m位置处出现峰值, 精确显示了目标实际距离位置。

图12 试验中距离成像处理的目标距离分辨结果
图13和图14分别给出了对图8 (a)和图8 (b)所示不同分布目标的声成像试验结果。其中, 左边分别为声成像系统直接获取未经优化处理的斜线形分布目标和三角形分布目标的原始声图像, 而且上图为侧视图, 下图为俯视图, 可见明显存在较大噪点。右图分别为2种分布目标左图经过优化处理后对应目标声图像的侧视图和俯视图, 可见明显提高了目标图像质量, 改善了目标成像效果。
图13、图14表明, 试验结果与前述理论分析及计算机仿真结果一致。因此, 基于非均匀乘积复合稀疏阵的鱼雷声成像方法可行且有效。
6 结束语
目标声成像是水下目标识别的最有效途径。本文针对鱼雷以及水下高速UUV等声成像载体平台的声成像应用条件, 提出了基于非均匀乘积复合稀疏阵预成空间密集波束的方位高分辨与宽带信号处理距离高分辨的声成像方法。理论计算分析了该方法的性能, 进行了计算机仿真和水池试验研究, 验证了该声成像方法的可行性和有效性。研究结果表明, 该方法减小了硬件规模, 增强了工程应用可行性, 同时可以有效实现水下目标声成像, 为鱼雷目标识别工程应用提供参考。
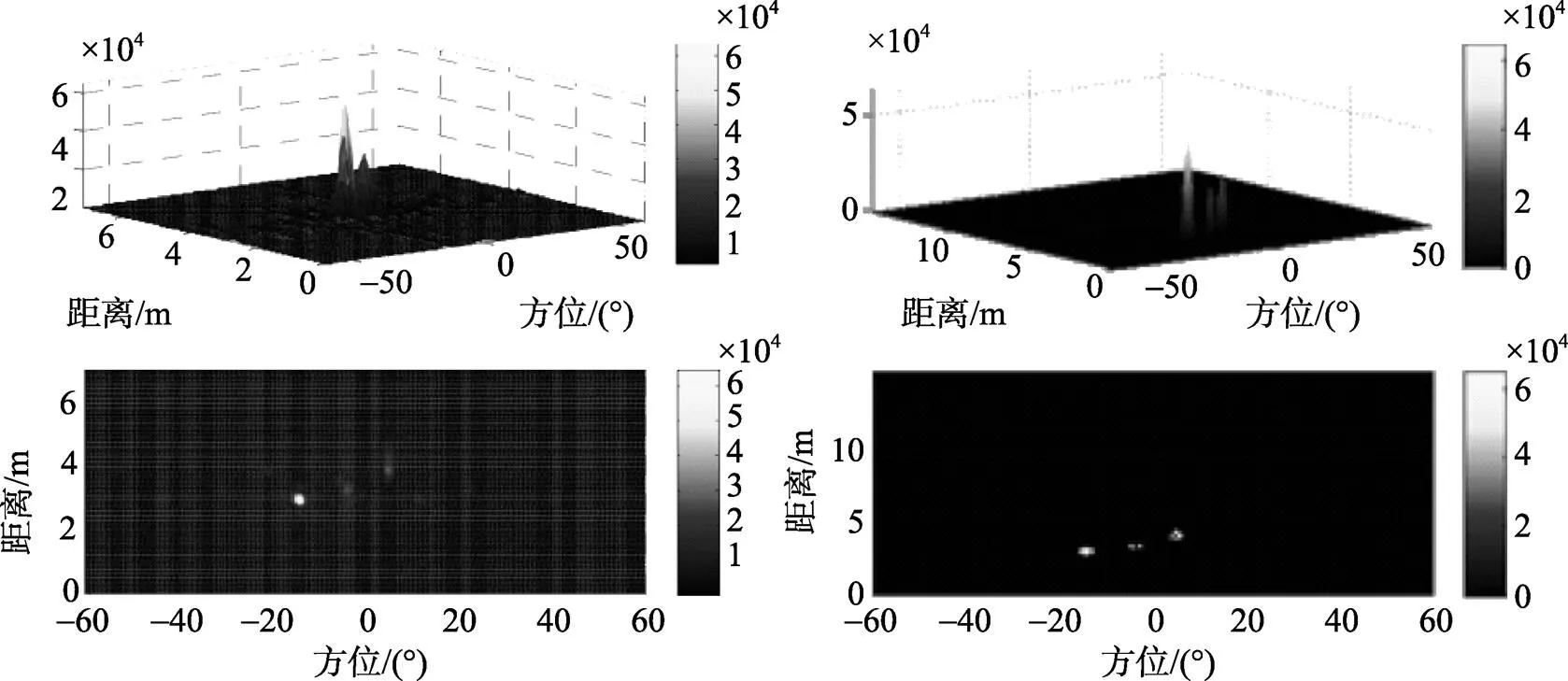
图13 斜线形分布目标声成像试验结果

图14 三角形分布目标声成像试验结果
[1] Sutton L. Underwater Acoustic Imaging[J]. Proceedings of the IEEE, 1979, 67(4): 554-566.
[2] 张静远, 金裕红, 张群飞, 等. 宽带距离-伸缩声成像实验研究[J]. 鱼雷技术, 2002, 10(4): 47-50.
[3] 樊书宏, 王英民, 岳玲. 基于复合阵鱼雷声成像方位分辨率提高方法[J]. 鱼雷技术, 2009, 17(1): 26-30.
Fan Shu-hong,Wang Ying-min,Yue Ling.A Method for Azimuth Resolution Improvement of Torpedo Acoustic Imaging Based on Complex Array[J]. Torpedo Techn- ology, 2009, 17(1): 26-30.
[4] 栾桂冬, 张金铎. 压电换能器和换能器阵[M]. 1版. 北京: 北京大学出版社, 2005.
[5] 田坦, 刘国枝, 孙大军. 声纳技术[M]. 1版. 哈尔滨: 哈尔滨工程大学出版社, 2000.
[6] 保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005.
High Resolution Acoustic Imaging for Torpedo Target Recognition with Sparse Array
FAN Shu-hong1,2, WANG Ying-min1, YUE Ling1, KANG Wen-yu1,2
(1. College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072,China; 2. The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
Underwateracoustic imaging and image guidance are the most effective ways to torpedo target recognition and intelligent precision guidance in modern complex underwater acoustic countermeasure of battlefield environment. In order to realize target image recognition and precise image guidance in torpedoes, aiming at torpedo applications, this study presented an acoustic imaging method with high azimuth and range resolutions by means of preformed dense narrow beams and image signal processing of each narrow beam. A novel high frequency non-uniform sparse array and the beamforming method were put forward to generate dense narrow beams and achieve high azimuth resolution. Andthe algorithms of high range resolution imaging processing with wideband signal were proposed for each beam further processing and achieving high range resolution. Additionally, a method for target acoustic image optimization based on double thresholds segmentation and fuzzy clustering analysis was developed. Hence, target high resolution acoustic imaging was implemented with lower hardware complexity of the imaging system and convenience. Computer simulations and experiments indicate that the acoustic imaging scheme is effective to achieve target acoustic images with high azimuth and range resolutions.
torpedo; sparse array; underwater acoustic imaging;target recognition;underwater acoustic countermeasure
TJ630.34
A
1673-1948(2011)01-0020-07
2010-08-19;
2010-11-01.
国防科技预先研究资助项目.
樊书宏(1975-), 男, 在读博士, 主要研究方向为水声信号处理及水下目标识别等.
(责任编辑: 杨力军)
