拉线式滑坡地表位移实时监测系统应用实例
2011-05-16李世海刘晓宇
刘 洋,李世海,刘晓宇
(中国科学院 力学研究所,北京 100190)
0 引言
降雨和库水涨落往往能在非常短的时间内诱发或者加剧滑坡灾害。在这种情况下,外部可测物理量(如降雨量、孔隙压力或者滑坡地表位移)的实时监测对于分析滑坡的稳定性或者了解其渐进破坏过程是非常有必要的。
目前,有很多种地表位移实时监测技术,如全自动全 站仪法[1-3]、GPS 技术[4-5]、基于 面阵 CCD 与CPLD 的 位 移 监 测 方 法[6-7]、时 域 反 射 法(TDR法)[8-9]、基于 Asp.Net的滑坡实时监测技术[10]和激光位移实时监测系统等[11-12],其中用的比较多的是全自动全站仪法和GPS技术。全自动全站仪(俗称测量机器人)由传统全站仪集成步进马达、CCD影像传感器构成的视频成像系统,并配置智能化的控制及应用软件发展而形成的。利用测量机器人进行滑坡地表变形的测量已在多个滑坡实地应用,施测时只需第一次进行学习测量,以后可根据学习记录自动定位对焦到预设测点[13]。GPS技术在滑坡监测中得到了越来越广泛的应用,监测精度理论上能达到毫米量级,但是价格比较昂贵,野外作业时需要的维护成本较大。
本文着重介绍拉线式滑坡地表位移实时监测系统,全面阐述其监测方法和系统结构。以三峡库区凉水井滑坡为例,客观地评价该系统在实际应用中的优缺点。
1 监测方法
拉线式原理如图1(a)所示,在固定点和测点之间连接一条钢丝线,钢丝一端固定在测点上,另一端绕过滑轮与一重锤(衡力)相连,滑轮处安装有角位移传感器。当测点发生位移时,所连接的钢丝线将随之移动。这个变化反映在图1(b)中就是固定点和测点1的相对位移。
同理,测点1上的测量设备与测点2相连便可测量点1,2间的相对位移量,以此类推,用一个不动点就可测量滑坡体一条轴线上各个监测点的位移,如图1(b)所示。这种拉线式原理不仅可以测量地表位移,还可以测量地表裂缝的变化。
2 系统结构
滑坡地表位移实时监测系统的特点是将传统的拉线式测量原理与现代通讯技术有机结合,从而形成了一种新型滑坡实时监测系统。
如图2所示,监测系统由三大部分组成,分别为数据采集系统,数据处理中心和客户端。在三大系统中数据采集系统的任务是:如何把位移信息转化为电信号,并解决如何传输电信号的问题;如何自动地传输、存储信号。数据处理中心的任务是:如何接收信号,并把电信号转化为数字信息;控制数据采集系统的采集频率;利用数据对滑坡进行预测预报。

图1 地表位移监测原理Fig.1 Theprincipleofsurface displacementmonitoring
当测点发生位移时,所连接的钢丝线将随之移动发生变化,这个变化值在滑轮上表现为滑轮转过相应的角度,体现在角位移传感器上为电压值发生改变,GPRS/GSM数据采集与发射系统将电信号进行A/D转换,转换成数字信号。同时利用现有的移动通信网络(使用GSM或GPRS方式),将信号传输到数据处理中心的接收装置。最后利用编制的软件进行数据分析与显示,给出被测点的位移随时间变化的规律。同时,数据处理中心可以根据现场情况,对现场的数据采集频率进行更改。
客户端的用户可以通过网络来访问数据处理中心,随时随地都可以查看所关心的监测信息,没有时间和地域的限制。
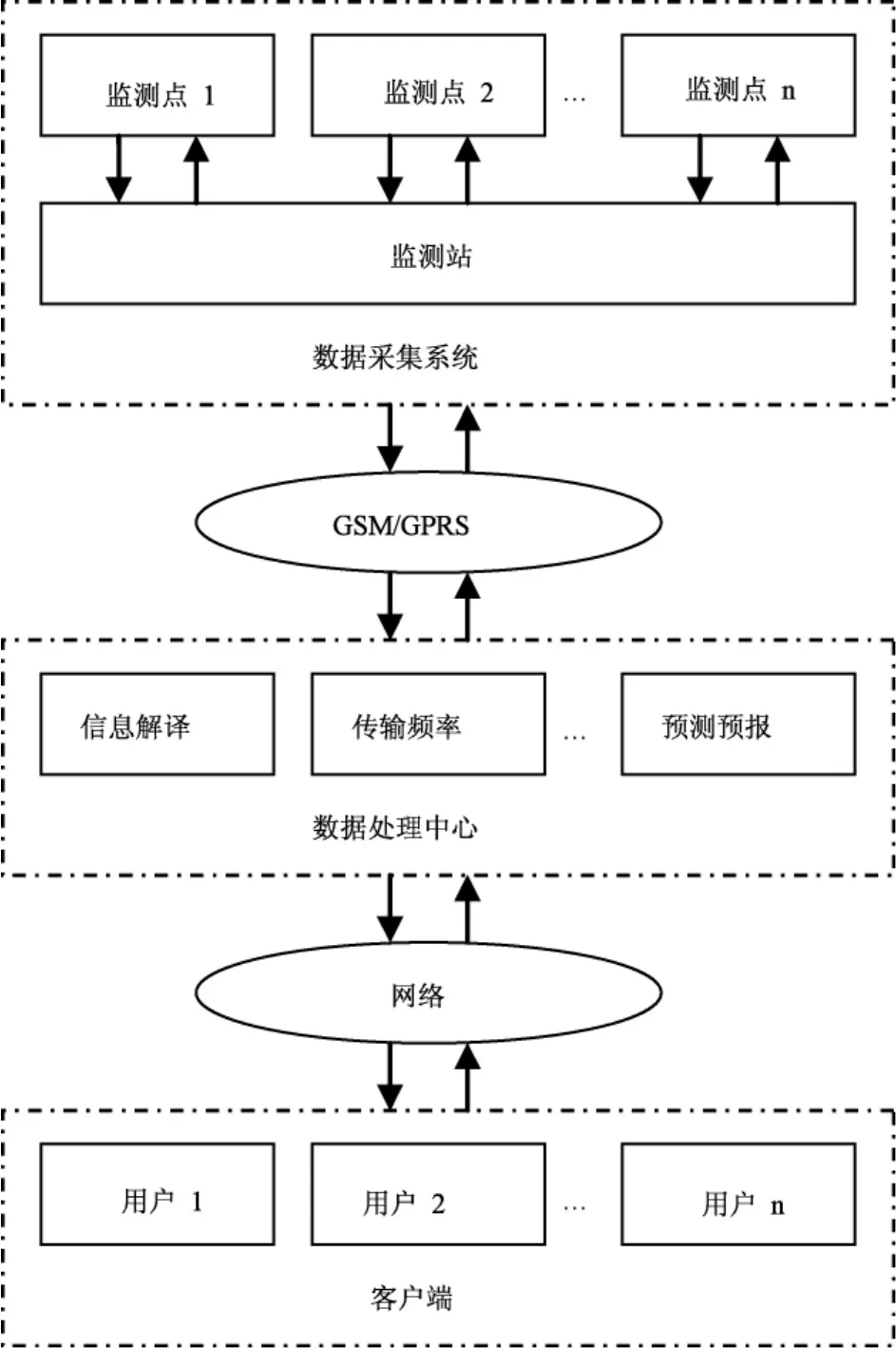
图2 地表位移实时监测系统结构Fig.2 Structureofsurfacedisplacement real-timemonitoringsystem
3 监测实例
3.1 滑坡简介
凉水井滑坡(图3)位于重庆以东300km的云阳县,长江右岸斜坡地段。到目前为止,滑坡前缘高程约100m,后缘高程约319.5m,相对高差约221.5m,平面纵向长度约434m,横向宽358m,面积约11.82×104m2,滑体平均厚度约 34.5m,总体积约 407.79×104m3。水面以上区域属构造剥蚀丘陵地貌和河流阶地地貌。在2008年滑坡发生时,滑坡整体平面形态呈“U”形,后部地形呈近似圈椅状,南高北低,中后部地形较陡,前部地形较缓,自然坡度30°~35°。滑坡东西两部均有一冲沟,走向分别为342°和351°,长分别为250m和220m,纵向坡度40°~60°,截面大多为“V”形,处于冲沟发育阶段的第一期,为自然形成,仅雨季有流水,水量直接受降雨影响。
3.2 监测数据分析
滑坡安装了多种自动化监测设备,主要包括深部位移、地表位移、地裂缝、GPS监测、雨量计、测量机器人和滑坡推力计等;也采用了无人飞机对滑坡进行地表位移监测,周期为1次/月。其中地表位移和地表裂缝采用了这种拉线式实时监测系统,其分布如图3所示。本文着重介绍这种方法在该滑坡监测中的应用,同时也详细讨论该方法与其它实时监测方法(GPS监测和测量机器人)和非实时监测方法(人工校核和无人飞机监测)的对比。

图3 自动化监测系统布置图(比例尺1:5000)Fig.3 Distributionoftheautomatic monitoringsystems
根据主滑方向,结构特征和地形地貌,选择了三条剖面展开地表位移监测,共计26个监测点(23个测点和3个固定点)(图3)。根据各点位置的不同,它们被划分为9个部分:主前部(DBK1-11,DBK1-10,DBK1-9),主中部(DBK1-8,DBK1-7,DBK1-6),主后部(DBK1-5,DBK1-4,DBK1-3,DBK1-2);右前部(DBK2-8,DBK2-7,DBK2-6),右中部(DBK2-5,DBK2-4),右后部(DBK2-3,DBK2-2);左前部(DBK3-7,DBK3-6),左中部(DBK3-5,DBK3-4),左后部(DBK3-3,DBK3-2)。各条剖线位移-水位-降雨量-时间关系曲线如图4所示。
在滑坡的边界和中部共安放了11个地表裂缝计(图3)。所有监测点被分为4组:上游边界(LC01,LC02,LC10),下 游 边 界(LC03,LC04,LC08,LC09),后缘裂缝(LC05,LC06,LC07),中部裂缝(LC11)。
同时,将2009年5月~2010年1月这段时期分为4个子阶段:退水期,145m低水位期,涨水期和170m高水位期。由于自动化专业监测没有记录滑坡最开始的滑移,因此采用了2008年12月10日 ~2009年1月14日的人工监测数据,称为初始阶段。各阶段的滑坡平均变形速率如表1所示。
根据图 4、图 5和表 1,可得出以下结论:
(1)当降雨量超过10mm时,各地表位移监测点滑移速率增大,降雨和发生大位移之间大约有3天的滞后期(图4)。原因是降雨停止后,地表积水及渗入边坡的雨水仍在向坡体下部运移,边坡体的饱和-非饱和渗流场仍在不断变化,位于坡顶的暂态饱和区变小、消失;位于坡脚的暂态饱和区和暂态水压力不断增大。随后,随着地下水的排泄,坡脚的暂态饱和区和暂态水压力才开始变小。这就是降雨入渗引起滑坡位移速率增大具有滞后发生特点的原因[14]。
(2)随着长江水位的降低,各地表位移监测点的移动速率仍很快。当水位下降至145m并保持低水位运营时,变形速率减小并趋于稳定。库水在175m高水位运营时的位移速率要大于涨水期间的位移速率(表1),这是因为刚开始涨水时,库水沿近似垂直于坡面的方向渗入滑坡体。渗流体积力的作用方向与流线一致,即渗流体积力的作用方向与等势线正交而指向坡内。显然,这种方向的渗流体积力对滑坡体的稳定性是一个有利的因素;但是,随着库水位的上升和时间的延续,175m水位以下的滑坡体和滑带都将逐渐饱和,从而使有效应力降低,抗滑力减小,下滑力增大。此外,更重要的是,175m以下的滑带的地面将承受浮托力,这对于滑坡的稳定则属于不利因素[14]。
(3)裂缝变形速率稳定,虽然在2009年6月20日下游边界裂缝和后缘裂缝出现较大增长,但随后几天又趋于稳定,这是由于那段时间的降雨所致。下游边界裂缝和后缘裂缝比上游边界裂缝和中部裂缝变形要大(图5),这表明滑坡整体从右后部向左前部滑动,方向为北西方向(图3)。中部裂缝的位移速率之所以出现负增长(表1中145m低水位期),是由于凉水井滑坡的滑面前缓后陡呈凹形。图4中主中部的位移量最小,表1中主中部在145m低水位期的位移速率小于同期主后部和主前部的位移速率,这两者也可以说明该滑坡的滑面形状导致了坡面中部位移和中部裂缝的总位移量和变形速率都较低;
(4)实时监测过程中,可通过对滑坡监测曲线的宏观分析来判定滑坡变形阶段。在滑坡等速变形阶段,其宏观的、平均的变形曲线斜率应该基本保持不变,总体上应为一“直线”,而一旦进入加速变形阶段,曲线斜率会不断增加,变形曲线总体上应为一条倾斜度不断增大的“曲线”。也就是说当滑坡加速变形时,其变形曲线将出现明显“拐点”,由此作为明显特征和判断依据确定预警级别。监测表明,目前该滑坡尚处于匀速变形阶段,预警级别为黄色(Ⅲ级),暂时不需要工程治理。

表1 不同部位在五个时期内的位移速率Table1 Deformationrateofdifferentpartsinthefivetimesteps

图4 地表位移随时间、库水位和降雨变化图Fig.4 Agraphofsurfacedisplacement versustime,waterlevelandrainfall
3.3 与人工监测对比
在自动化监测的同时,人工监测数据被用来校核地表位移监测和地裂缝监测结果。当滑坡滑动时,两点之间的钢丝距离会相应的变化。变化数据能够同时被数据采集系统和手工的直尺采集到(图6),两者之间的区别在于:前者是实时的而后者一周进行两次。虽然GPS能够作为地表位移监测的校核手段,但它们的数量还不至于校核所有的地表位移和地裂缝监测点,人工校核手段能够以一种合理的代价满足校核要求。图7~图9的校核结果表明,自动化监测数据与人工校核数据有很好的吻合性。

图5 地表裂缝随时间、库水位和降雨变化图Fig.5 Agraphofcrackdisplacement versustime,waterlevelandrainfall
3.4 与GPS监测对比
GPS监测的目的是为校核地表位移监测的正确性。GK1-1,GK1-2和 GK2-1分别对应 DBK1-3,DBK1-9和 DBK2-5(图 10~12)。基准点两个,分别为 GJK1-1、GJK1-2,在滑坡体外。

图6 人工监测现场操作Fig.6 Theoperationofartificialmonitoring

图7 人工监测同地表位移监测点DBK1-3的对比Fig.7 Thecomparisonofartificialmonitoringresult andsurfacedisplacementmonitoringpointDBK1-3
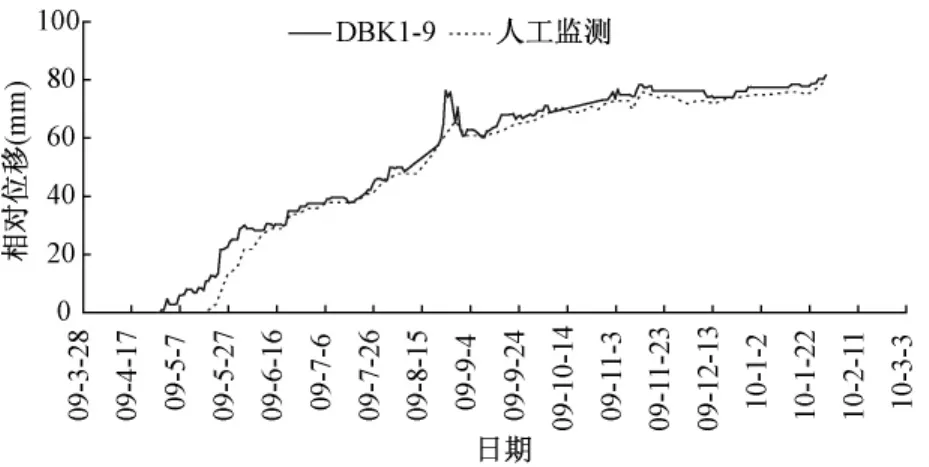
图8 人工监测同地表位移监测点DBK1-9的对比Fig.8 Thecomparisonofartificialmonitoringresult andsurfacedisplacementmonitoringpointDBK1-9
由图13和图15可以看出,GPS监测曲线与相应位置的地表位移监测结果非常吻合,但是前者数据很不稳定,有时竟几个月没有接收到数据。原因在于野外滑坡监测,会遇到没有电源或者供电不足的现象,GPS虽然很精确,但是所需要的配套设施要求严格,维护成本大。在凉水井滑坡上使用的是太阳能电池供电,该供电系统明显不能满足GPS的功耗。

图9 人工监测同地表位移监测点DBK2-5的对比Fig.9 Thecomparisonofartificialmonitoringresult andsurfacedisplacementmonitoringpointDBK2-5
由图14可以看出,GPS监测点 GK1-2和地表位移监测点 DBK1-9的监测结果出现了较大的差距,最大误差接近10cm。同一位置的全站仪监测结果JC10又和GK1-2的结果吻合,说明DBK1-9的结果出了问题。但从人工监测的数据来看(图 8),DBK1-9和人工监测数据很吻合,所以DBK1-9不应该有数据采集或者是仪器的问题。而且在图14中出现误差的时期内,GK1-2和DBK1-9的位移-时间曲线斜率一致。因此可以判断DBK1-9这个点动了,动的原因不是由于滑坡的滑动,而是由于施工问题导致其自身的基座产生了松动。
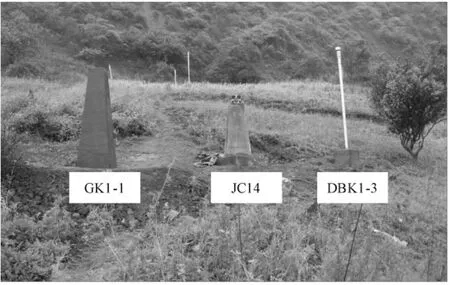
图10 GPS监测点GK1-1、地表位移监测点 DBK1-3和全自动全站仪监测点JC14的现场位置图Fig.10 ThelocationofGPSmonitoringpointGK1 -1,surfacedisplacementmonitoringpointDBK1-3and automatictotalstationmonitoringpointJC14
3.5与全自动全站仪监测对比
全自动全站仪又俗称测量机器人,是基于传统的全站仪监测技术外加现代计算机和通讯技术而形成的,它可以监测出某点的三维运动方式。从图13~图15可以看出,测量机器人实时监测的结果不仅连续性较好而且比较稳定。但在滑坡现场应用中受天气影响较大,遇到大雾天或者暴雨天则无法实施监测;如果滑坡太庞大,有可能会超出测量机器人的监测范围。拉线式地表位移实时监测方法只能反映某点的二维运动方式,但能很好地克服天气等所带来的影响。

图11 GPS监测点GK1-2与地表位移监测点DBK1-9的现场位置图Fig.11 ThelocationofGPSmonitoringpointGK1 -2,surfacedisplacementmonitoringpointDBK1-9and automatictotalstationmonitoringpointJC10

图12 GPS监测点GK2-1与地表位移监测点DBK2-5的现场位置图Fig.12 ThelocationofGPSmonitoringpointGK2 -1,surfacedisplacementmonitoringpointDBK2-5and automatictotalstationmonitoringpointJC23

图13 GK1-1、DBK1-3和 JC14的对比Fig.13 ThecomparisonofGK1 -1,DBK1 -3andJC14
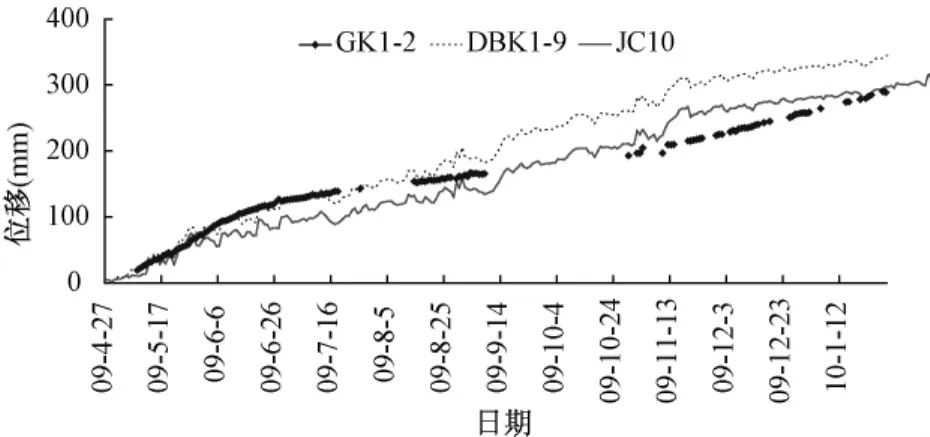
图14 GK1-2、DBK1-9和 JC10的对比Fig.14 ThecomparisonofGK1 -2,DBK1-9andJC10

图15 GK2-1、DBK2-5和 JC23的对比Fig.15 ThecomparisonofGK2-1,DBK2-5andJC23
3.6 与无人飞机监测的对比
无人飞机监测适合于观测滑坡的剧烈变形。在那个阶段,位移或许超过了所有监测设备的量程,并且这时人员是无法接近滑坡的。作为一种新型科学监测手段,该方法曾应用于“5.12”四川汶川大地震时唐家山堰塞湖的监测。在凉水井滑坡上选择了30个标点,每隔一个月对滑坡进行一次航拍,通过对比前后两次滑坡照片来解译标点位移。该监测方法的优势在于观测宏观位移,但是凉水井滑坡还没有进入该阶段,所以拉线式地表位移实时监测方法不能同无人飞机监测作横向比较,无人飞机监测被作为滑坡的辅助监测方法。
4 讨论
(1)拉线式滑坡地表位移实时监测系统是将传统的监测方法和现代化的通讯工具进行结合,实现了实时监测,并且有效地克服了天气等因素带来的影响。
(2)数据处理中心可以远程控制现场数据采集系统的采集频率,理论上最高采集频率和当地移动通讯网络的最高数据发射频率一致。当雨季或者汛期时可以加大监测频率,这样就可以及时获知监测曲线的“拐点”,从而尽早地通知当地群众转移或适时封航。
(3)监测量程理论上可以无限大,只要钢丝线足够长,但在实际操作中一般小于50m。
(4)该系统只能监测出某点的二维运动方式,不能反映监测点的三维运动情况。
(5)该系统的监测误差具有累积性,若上一点出现了问题,则也会影响到后面其它点的监测。
(6)仅仅依靠监测数据,而不考虑内外部因素对滑坡影响,很有可能无法对凉水井滑坡稳定性做出科学评估。还应采用集成地质、力学信息和监测数据的滑坡动态分析模型,对该滑坡的危险性等级进行科学评估和险情预警。
5 结论
拉线式滑坡地表位移实时监测系统将传统的拉线式测量原理与现代通讯技术有机结合,为滑坡实时监测提供了一种可行的技术手段。
通过对三峡库区凉水井滑坡实时监测数据的分析,表明该滑坡尚处于匀速变形阶段,预警级别为黄色(Ⅲ级),暂时不需要工程治理。
通过与凉水井滑坡其它实时或非实时监测系统的数据对比,证明该系统不受地理环境、气候等因素的限制,并说明了此种监测方法运用于滑坡实时监测具有很高的实用价值。但是次系统还需要作进一步改进,以克服自身存在的一些缺陷。
[1]武文波,张国辉,梁洪武,等.采用全自动全站仪的滑坡监测系统研究[J].仪器仪表学报,2004,25(4):412-413.WUWenbo,ZHANG Guohui,LIANGHongwu,etal.Automatictotalstationbasedhill-creepmonitoringsystem[J].ChineseJournalofScientificInstrument,2004,25(4):412 -413.
[2]张国辉.全自动全站仪滑坡监测数据的远传和处理[硕士学位论文][D].辽宁:辽宁工程技术大学,2005.ZHANGGuohui.Transmissionandprocessingoflandcreepmonitoringmeasurementbyautomatictotalstation[Masterthesis][D]. Liaoning:Liaoning Technical University,2005.
[3]易庆林,卢书强,何祥.测量机器人在滑坡应急监测中的应用[J].人民长江,2009,40(20):62-63.YIQinglin,LUShuqiang,HExiang.Theapplicationof measurementrobotinlandslideemergencymonitoring[J].YangtzeRiver,2009,40(20):62-63.
[4]刘根友,薛怀平,郝晓光,等.三峡库区秭归GPS滑坡监测网数据分析[J].大地测量与地球动力学,2009,29(3):70 -73.LIUGenyou,XUEHuaiping,HAOXiaoguang,etal.Data analysisofGPSslidemonitoringnetworkinZiguizoneof threegorgesreservoirarea[J].JournalofGeodesyand Geodynamics,2009,29(3):70 -73.
[5]John Chadwick,Stephen Dorsch,NancyGlenn,etal.Applicationofmulti-temporalhigh-resolutionimageryand GPSinastudyofthemotionofacanyonrimlandslide[J].ISPRSJournalofPhotogrammetry & RemoteSensing,2005,59:212 -221.
[6]孙骏,黄跃平.基于面阵CCD与CPLD实现的位移实时监测系统的研究[J].光电子技术与信息,2005,18(1):37-41.SUN Jun,HUANG Yueping. Research on real-time displacementinspectingsystembasedonthepaneledCCD and CPLD [J]. Optoelectronic Technology and Information,2005,18(1):37-41.
[7]孙骏,黄跃平.基于面阵CCD与CPLD实现的图像采集系统[J].现代电子技术,2004(21):87 -91.SUNJun,HUANGYueping.Imagecollectingsystembased onthepaneledCCDandCPLD[J].ModernElectronic Technique,2004,(21):87 -91.
[8]唐然,汪家林,范宣梅.TDR技术在滑坡监测中的应用[J].地质灾害与环境保护,2007,18(1):105 -110.TANGRan,WANGJialin,FANXuanmei.Applicationof TDRtechnologytolandslidemonitoring[J].Journalof GeologicalHazardsandEnvironmentPreservation,2007,18(1):105 -110.
[9]张青,史彦新.基于TDR的滑坡监测系统[J].仪器仪表学报,2005,26(11):1199 -1202.ZHANG Qing,SHIYanxin. Thelandslidemonitoring systembasedonTDR[J].ChineseJournalofScientific Instrument,2005,26(11):1199-1202.
[10]张像源.基于Asp.Net的滑坡实时监测数据网上发布系统设计与实现[J].中国地质灾害与防治学报,2005,16(4):120 -123.ZHANGXiangyuan.Alandsliderealtimemonitoringdata onlineissuesystemdesignedandrealizedbyAsp.Net techniques[J].TheChineseJournalofGeologicalHazard andControl,2005,16(4):120-123.
[11]伍毅敏,吕康成,郑颖人.深基坑周边位移实时监测系统的研发[J].西安建筑科技大学学报(自然科学版),2006,38(2):194 -198.WU Yimin,LU Kangcheng,ZHENG Yingren.Development of the monitoring system for instant displacementsurrounding deep foundation pits[J].JournalofXi'anUniversityofArchitectureandTechnology(NaturalScience),2006,38(2):194-198.
[12]吕康成,赵久柄,张守一,等.岩土工程位移实时监测系统研究[J].公路,2005(4):151-155.LVKangcheng,ZHAOJiubing,ZHANGShouyi,etal.Studyongeotechnicaldisplacementreal-timemonitoring system[J].Highway,2005(4):151 -155.
[13]冯春,张军,李世海,等.滑坡变形监测技术的最新进展[J].中国地质灾害与防治学报,2011,22(1):11-16.FENGChun,ZHANGJun,LIShihai,etal.Areviewof thelatestdevelopmentoflandslidedeformationmonitoring techniques[J].TheChineseJournalofGeologicalHazard andControl,2011,22(1):11-16.
[14]黄润秋,许强,戚国庆.降雨及水库诱发滑坡的评价与预测[M].北京:科学出版社,2007:178-197.HUANG Runqiu,XU Qiang,QIGuoqin. Rainfullinducedlandslidesandreserverevaluationandprediction[M].Beijing:SciencePress,2007:178-179