基于DSP的六相永磁同步电动机调速系统
2011-04-27苗鑫
苗鑫
(辽宁石油化工大学 职业技术学院,辽宁 抚顺 113001)
基于DSP的六相永磁同步电动机调速系统
苗鑫
(辽宁石油化工大学 职业技术学院,辽宁 抚顺 113001)
根据多相永磁同步电动机(PMSM)的调速系统特性建立数学模型,并搭建了基于dq坐标系的六相PMSM磁场定向控制的双闭环调速系统仿真模型。在仿真模型基础上,设计实现了基于数字信号处理器(DSP TMS320LF2407A)的六相PMSM调速系统控制器,并且对工程实现的若干问题进行了阐述,详细地设计了相关硬件电路和软件部分。通过系统仿真以及实验结果,说明系统建模和算法都是正确的。
永磁同步电动机;调速系统;建模;矢量控制;工程实现
1 引言
永磁同步电动机(PMSM)具有体积小,性能好,结构简单,运行可靠性高,输出转矩大等特点[1]。同时,相比较三相系统,多相系统具有以低压电器实现大功率;转矩脉动减小,系统动、静态特性提高;系统整体可靠性提高;转子谐波损耗减小,每安培转矩输出增加等优点,因此,多相永磁同步电动机调速系统引起了电机设计及驱动技术研究人员的广泛关注和重视,并得到了广泛的应用[2-3]。
有关多相PMSM矢量控制及仿真、故障分析解决方案和多相电机的逆变器调制策略[4-6]的文献很多,因此,本文在充分考虑系统可靠性和故障解决问题的基础上,进行了硬件和软件设计。
2 多相永磁同步电动机建模
在磁动势和功率不变的原则下,利用坐标变换从多相静止坐标系下得到的dq轴数学模型。假设:1)不计定子表面齿、槽的影响;2)不考虑温度及频率对电机各参数影响;3)电机定子绕组产生的磁场在空间上都按正弦分布;4)忽略电机磁路饱和,磁路线性。
在上述前提下,经过坐标变换可以得到dq坐标系下六相PMSM的磁链方程、电压方程和电磁转矩方程分别为

式中:ud,uq,id,iq,Ld,Lq,Ψd,Ψq分别为定子电压、电流、电感和磁链的dq轴分量;Rs为定子相电阻;ωs为电角速度;Ψf为永磁磁链;np为电机极对数;Tem为电磁转矩;Tl为负载转矩;Rω为阻力系数;ω为机械角速度;J为转动惯量。
3 双闭环控制系统仿真分析
3.1 六相永磁同步电动机双闭环磁场定向控制
为了对多相PMSM控制系统进行验证,文中建立了六相PMSM基于式(1)~式(4)的仿真模型。采用双闭环的磁场定向控制方式,简化的控制框图如图1所示。

图1 双闭环控制框图Fig.1 Two closed loops control block diagram
为了工程实现上的简单化,采用电流滞环的PWM调制方式,该方式对可以适合各种多相电机直接控制,而且电流滞环的快速性得到了很好的体现。其中,idref一般情况下为0,从而实现电磁转矩的解耦控制。
利用Matlab/Simulink建立上述控制过程模型,其中选用的六相PMSM电机参数为:直轴电感Ld=10.03mH,交轴电感Lq=8.09mH,转子磁链Ψf=0.144Wb,转动惯量J=0.026kg·m2,阻力系数RΩ=0,电阻R=2.21Ω,极对数np=11。
3.2 仿真结果分析
基于Matlab/Simulink建立模型的仿真结果如图2~图5所示,其中图2为采用电流滞环控制的电机六相电流波形,可以看出,在0.01s加载后,电流能够快速的得以稳定,而且正弦度较好。

图2 PMSM六相电流波形Fig.2 Currents of sixphase PMSM

图3 PMSM电磁转矩波形Fig.3 Electromagnetic toque of PMSM
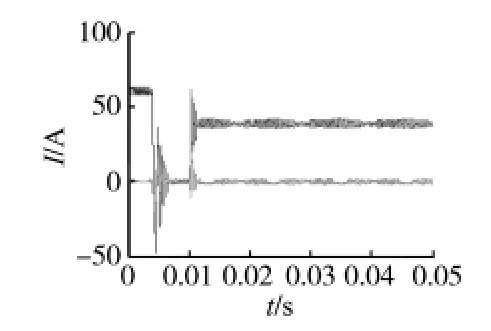
图4 id和iq电流Fig.4 Current idand iq

图5 转速曲线Fig.5 Curve of speed
图3是电磁转矩响应曲线,从图3中可以看出,启动初期电磁转矩有所波动,不过在极短的时间内能够迅速实现平滑,而且加载后,转矩波动比较小。从图4中的id和iq电流曲线可以看到,磁场定向控制能够实现较好的解耦控制。图5是速度响应曲线,可以看到,系统启动时有一定的超调,不过在0.01s加载阶段则超调很小。
4 工程实现与实验结果
4.1 多相永磁同步电动机调速系统工程实现问题
多相PMSM工程化问题主要体现在根据应用环境下的编码器、电流、电压传感器等检测元件的安装,供电回路的布线走向,高频电磁脉冲干扰对控制系统的影响等。
在速度和电流双环控制结构系统中为了实现速度的实时检测,采用编码器来捕获电机转速和磁场位置,而采用电流和电压传感器实现电流和电压等电量的采集,为控制系统提供电流内环反馈信号和电压检测等。为了避免控制系统高频电磁干扰问题,通常要兼顾高压线路布线对控制电路的影响和控制电路自身抗干扰设计。
4.2 系统部分硬件电路设计
电流采样电路如图6所示。为了实现信号采集的准确性,采样部分采用二级运放跟随器的方式,同时,图6中U1是电压提升部分,以实现输入信号满足DSP运算要求。D1为3.3V的一个稳压二极管,目的是限制输入信号过限。

图6 电流采样电路Fig.6 Current sampling circuit

图7 电流保护电路Fig.7 Current protect circuit
电流保护电路如图7所示。其中ia和ib是电流经过互感器或是传感器得到的电机相电流值,经过二极管整流后与参考电压进行比较,然后,由比较器LM339输出故障信号。该信号参与下面的故障电流处理部分。也就完成了硬件电流保护。
4.3 系统主要软件设计
为完成调速功能,系统的主程序和中断子程序流程图如图8所示。
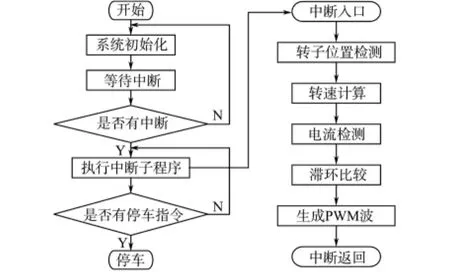
图8 主程序和中断子程序流程图Fig.8 Flow chart of main and interrupt programs
为了提高响应速度,故障处理设计采用最为简单的多路与门方式,当电流、电压、功率模块和温度故障信号发生电平跳转时,即可认为是系统故障,随即输出封桥信号送DSP,如图9所示。

图9 故障处理Fig.9 Fault handling
4.4 实验结果

图10 系统实验平台Fig.10 Experimental platform
六相PMSM调速系统的实验平台如图10所示,电网电压经过变压器变压,再经由二极管整理后得到整定的交流电,以此提供直流母线电压。本文在此系统硬件平台基础上完成了整个调速系统的实验测试。图11是电机A相电流波形及其THD,可以看到,电流的THD很小,满足调速系统要求。

图11 A相电流及其THD波形Fig.11 Phase Acurrent and THD waves
5 结论
通过对多相永磁同步电动机(PMSM)的数学建模,设计了六相PMSM基于磁场定向控制的双闭环调速系统,同时对其进行了基于 Matlab/Simulink的分析。本文探讨了多相PMSM调速系统工程实现的一些问题,设计了采样、保护,故障处理等硬件电路和中断处理、故障诊断等软件部分,实现了基于DSP TMS320LF2407的数字控制系统设计。最后,仿真和实验结果证明了系统建模和算法的准确性,系统性能较好。
[1] Miller THE.Brushless Permanent Magnet Reluctance Motor Drives[M].Oxford New York:Clarendon Press,1989.
[2] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[3] Leila Parsa.On Advantages of Multi-phase Machine[C]∥31stAnnual Conference of IEEE Industrial Electronics Society,2005:1574-1579.
[4] Casadei D,Serra G,Tani A,etal.General Inverter Modulation Strategy for Multi-phase Motor Drives[C]∥IEEE International Symposium on Industrial Electronics4-7June 2007:1131-1137.
[5] 周马山,欧阳红林,童调生,等.不对称多相PMSM的矢量控制[J].电工技术学报,2004,19(20):37-41.
[6] Martin J P,Meibody Tabar F,Davat B.Multiple-phase Permanent Magnet Synchronous Machine Supplied By VSIS,Working Under Fault Conditions[J].IEEE IAS Annual Meeting,2000:1710-1717.
修改稿日期:2010-12-10
Realization of Six Phase PMSM Variable Speed System
MIAO Xin
(InstituteSchoolofVocationalTechnology,LiaoningShihuaUniversity,Fushun113001,Liaoning,China)
The mathmatical model was established based on analyzing the characters of variable speed system of multiphase PMSM.Furthermore,simulation model has been built up on the basis of the two closed loops control modulation system for the six phase PMSM based on field oriented control.On this basis,designing realizes six phase PMSM variable speed system based on DSP TMS320LF2407A.Meanwhile,it analyzes some problems in engineering realization and designs hardware circuit and software in more detail.Finally,the simulation and experimental results prove the veracity and feasibility of modeling and algorithm.
permanent magnet sgnchronous motor(PMSM);variable speed system;modeling;vector control;engineeringrealization
TM351
A
苗鑫(1983-),男,研究生,助教,Email:stiven99999@163.com
2010-08-30
