BPSK调制高动态遥测接收机的设计
2011-04-26胡东伟潘申富汪春霆
胡东伟,陈 杰,石 寅,潘申富,汪春霆
(1. 中国科学院微电子研究所 北京 丰台区 100029; 2. 中国科学院半导体研究所 北京 丰台区 100083;3. 中国电子科技集团公司第五十四研究所 石家庄 050081)
遥测接收机通常用于接收空间飞行器发送回地面的测量数据。传统上的遥测接收机普遍采用PCM/FM的遥测体制[1]。但PCM/FM体制需要的信号带宽较宽,引入了更多的噪声,从而降低了接收灵敏度。因此,本文研究了一种BPSK调制的遥测接收系统。
由于空间飞行器的飞行速度快、加速度大,遥测接收机通常表现出很高的动态特性,即飞行器飞行速度快,一方面意味着多普勒频移会很大,另一方面意味着码元周期变化大。本文把多普勒效应造成的多普勒频移称为频率多普勒,把多普勒效应对码元周期的影响称为码多普勒。飞行器加速度大,意味着频率多普勒和码多普勒的变化很快,由此给遥测接收机的设计造成很大的困难。
现代接收机普遍采用数字技术来实现。一般由模拟电路将射频信号变到低中频,然后进行AD采样,此后,所有的处理都在数字域进行。本文研究一个BPSK调制的遥测系统,信息传输速率为2 Mb/s,最大加速度为20g(g为重力加速度),最大速度为7 km/s。
1 系统描述及接收机需要解决的问题
1.1 系统描述
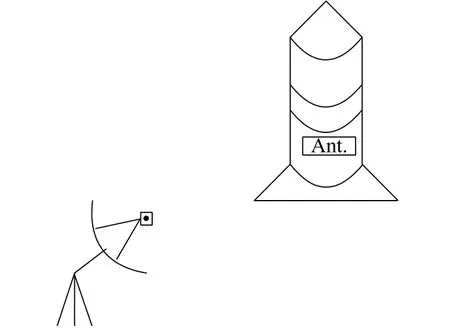
图1 遥测系统示意图
图1为遥测系统示意图。在空间飞行器上装载一个(腰带)天线,在地面设置一个伺服遥测接收站。飞行器上的各传感器测得的数据,通过(腰带)天线发往地面的伺服天线。地面的伺服天线接收到信息后,做基带处理,解调出数据。本文主要研究这一地面的基带接收,不包括伺服系统。对于基带接收,系统主要有两个特点:1) 因一般空间飞行器飞行高度较高,传播环境可视为自由空间系统;2) 航天器飞行速度、加速度都很大,由于多普勒效应,导致了接收信号的高动态特性。
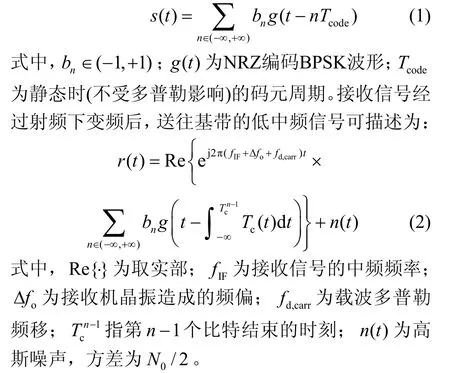
发送信号为非归零(NRZ)编码BPSK调制,可描述为:
1.2 接收机需要解决的问题
由于从飞行器到遥测接收机的传播路径可视为自由空间,不存在多径现象,所以接收机主要需要解决同步问题。同步包括采样同步、频率同步和帧同步。帧同步是在BPSK解调之后实现,较简单,本文不予研究。由于飞行器的高动态特性,采样同步和频率同步都严重受到多普勒效应的影响[2],是接收机需要解决的主要问题。
多普勒频移与速度、载波频率的关系为:

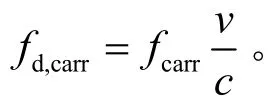
飞行器最大速度为7 km/s,载频设为2.3 GHz,则最大多普勒频移可达53.7 kHz。设接收机晶振为10 ppm,则晶振引起的最大频偏可达23 kHz。多普勒和晶振引起的频偏都是未知的,需要克服。传输码速率为2 Mb/s,则码速率的偏移可达46.7 bit/s。这意味着,在最高速率7 km/s时,接收机每秒将多(或少,取决于飞行器是靠近还是远离接收机)接收46.7个码元。显然,倘若接收机仍然按照2 Mb/s的速率进行采样判决,将造成很大的误码率。
2 接收机结构
现代接收机一般采用全数字结构,图2给出了本文的全数字接收机结构[3]。图中,接收信号经过模拟射频变换到20 MHz的低中频后,进行AD采样,采样率为16 MHz,是单路数据。AD采样的数据与本地数字控制振荡器(NCO)产生的正交载波相乘,变换为I、Q两路。I、Q两路数据送入一个7级的延迟线。延迟线的第1、3、5、7级分别输入4个相关器(P1(Prompt1)、E(Early)、P2和L(Late))。P1或P2相关器的输出经过一个多路选择器,选择结果用于最后BPSK判决,并用于鉴频鉴相。一方面,鉴相结果经过一个环路滤波器,控制载波NCO的相位增量,从而调整NCO的频率,实现载波跟踪。乘法器、P1/P2相关器、多路器、载波鉴相器、载波环路滤波器和载波NCO构成一个反馈环路,称为载波环路。另一方面,E/L相关器进入一个码鉴相器,鉴相结果送入码环路滤波器,控制码NCO的相位增量,从而调整码NCO的溢出频率。码NCO的溢出信号,控制相关器输出并清零。乘法器、E/L相关器、码鉴相器、码环路滤波器和码NCO构成一个反馈环路,称为码环。
由于相关器每次输出的同时会清零,每两次码NCO的溢出,代表一个比特周期的积分区间。调整码NCO的溢出频率,意味着调整该积分区间的长度和位置,从而实现采样同步。在无码多普勒的情况下,每个码元恰好为8个采样。码NCO每8个时钟溢出一次,指示3个相关器输出其积分值,同时积分器清零,为下一个码元的积分做好准备。倘若由于多普勒效应导致码元周期缩短,以致经常第8个采样落在了下一个码元周期,这时,E/L相关器的能量不再平衡,将导致码NCO做出调整,增大码NCO的相位增量。这样,会经常出现经7个采样时钟,码NCO溢出,积分器输出。反之,倘若由于多普勒效应导致码元周期加长,E/L相关器的能量会不平衡,码NCO的相位增量会减小,会经常出现经过9个采样时钟,码NCO才溢出,积分器才输出。由此,只要环路稳定,相关器会一直跟踪保持平均一个码元的积分时间。
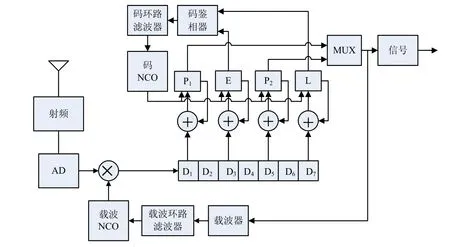
图2 接收机结构
3 环路设计
从以上对接收机结构的讨论中可以看到,接收机的核心是两个环路。载波环路实现载波频率的跟踪,克服载波多普勒的影响,码环路实现积分定时的跟踪保持,克服码多普勒导致的采样定时误差。
3.1 码鉴相器


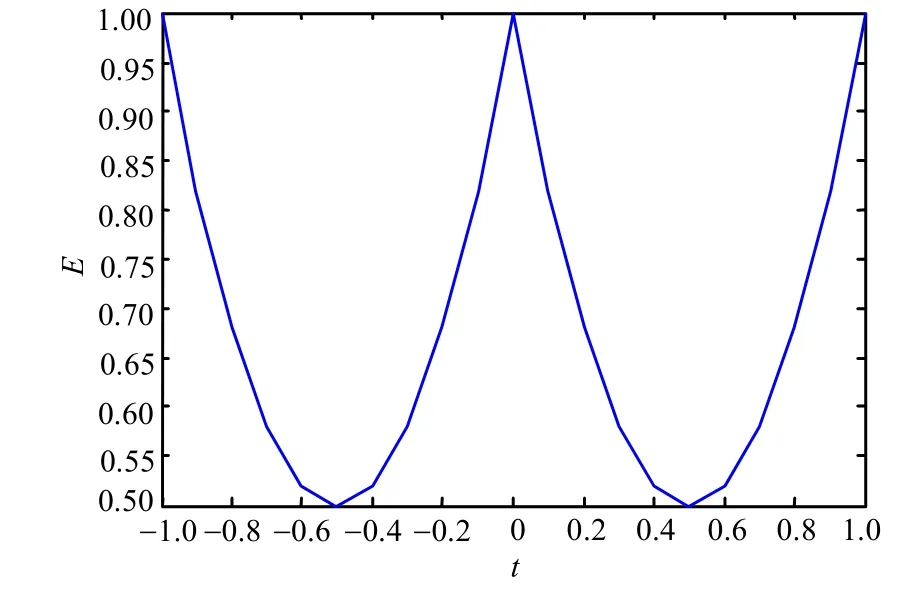
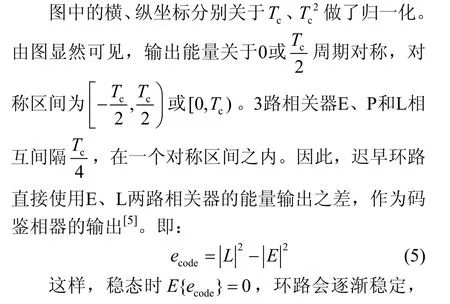
图3 积分器输出能量期望与积分起始时间的关系
3.2 载波鉴相器


稳定情况下,ecarr=0,此时,Δf=0,ϕ=0或π。这时,输出信号全部集中在I支路上,Q支路的输出只有噪声。当收敛在π时,I支路的判决输出存在o
180相位翻转。该翻转可通过帧结构中的同步字来发现并矫正。
3.3 环路滤波器


图4 环路模型
由于飞行器的高动态特性,本文选择二阶的环路滤波器,其传递函数为:
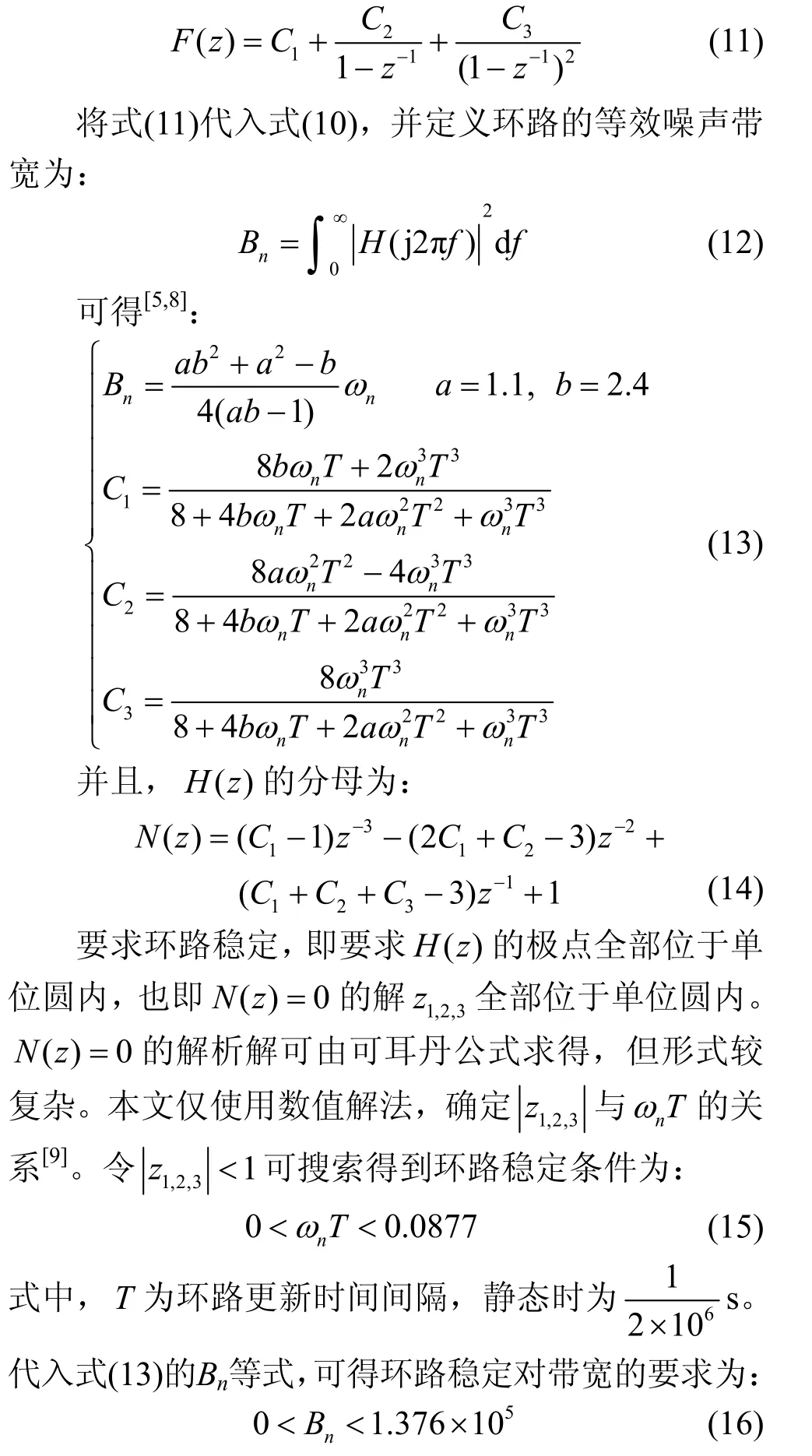
该条件是很宽松的。根据H(z)的表达形式,还可以研究环路的稳态误差。根据文献[9-10],三阶环路的稳态误差对相位阶跃不敏感,对频率阶跃不敏感,对频率变化率(即加速度)不敏感,而对加加速度敏感。
4 算法仿真

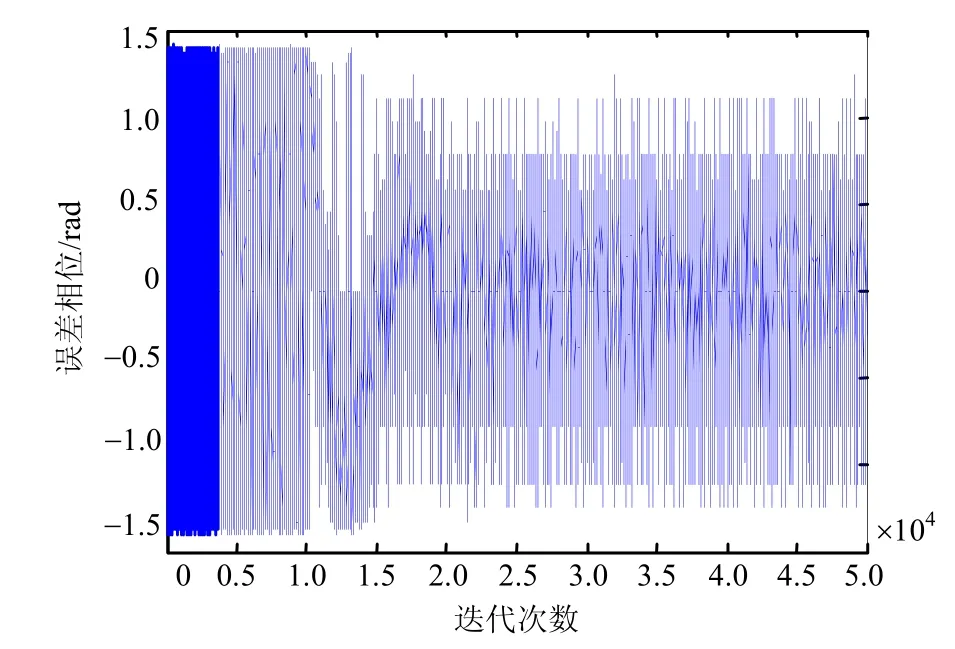
图5 载波环路误差信号变化
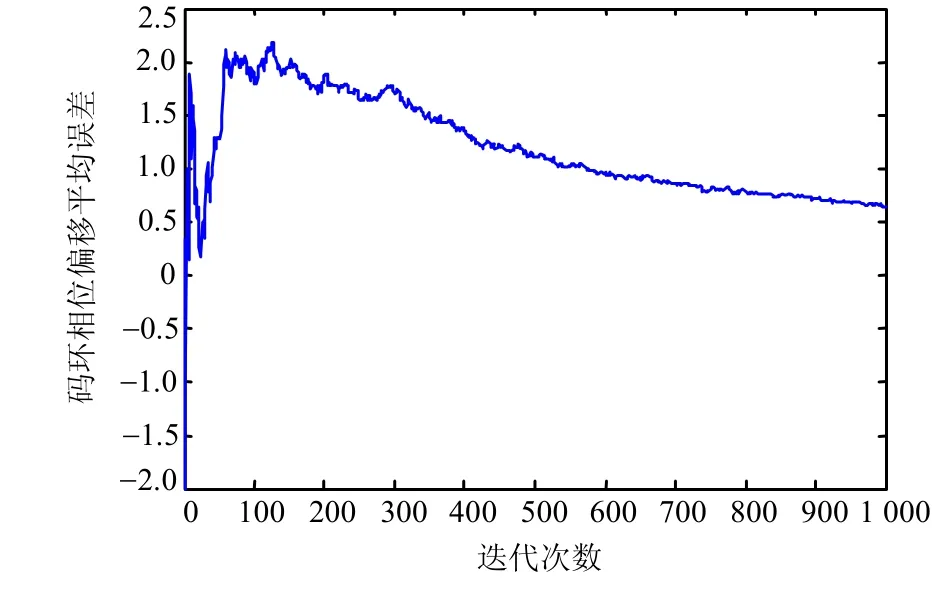
图6 码环误差信号平均值变化情况
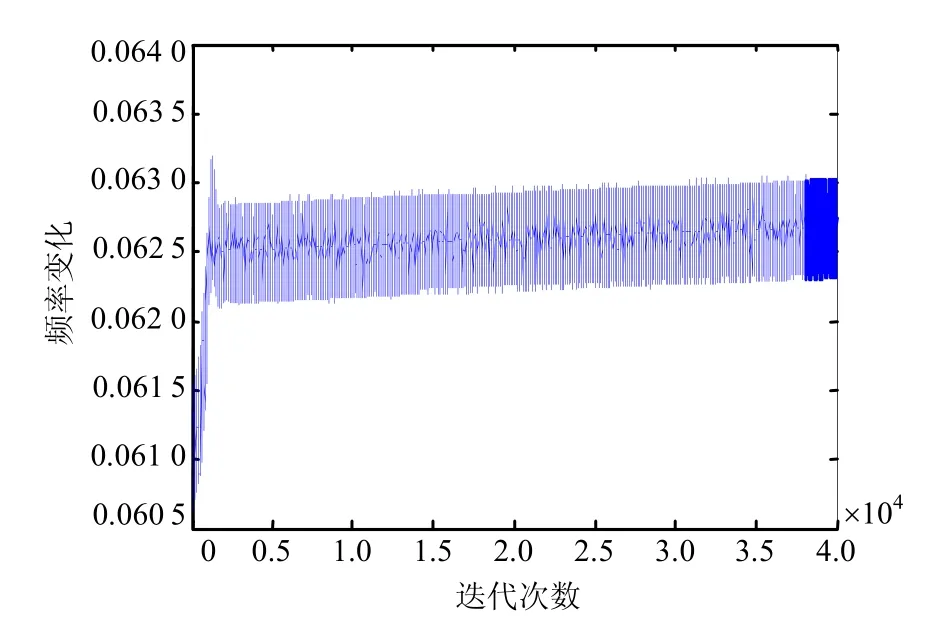
图7 载波频率牵引过程
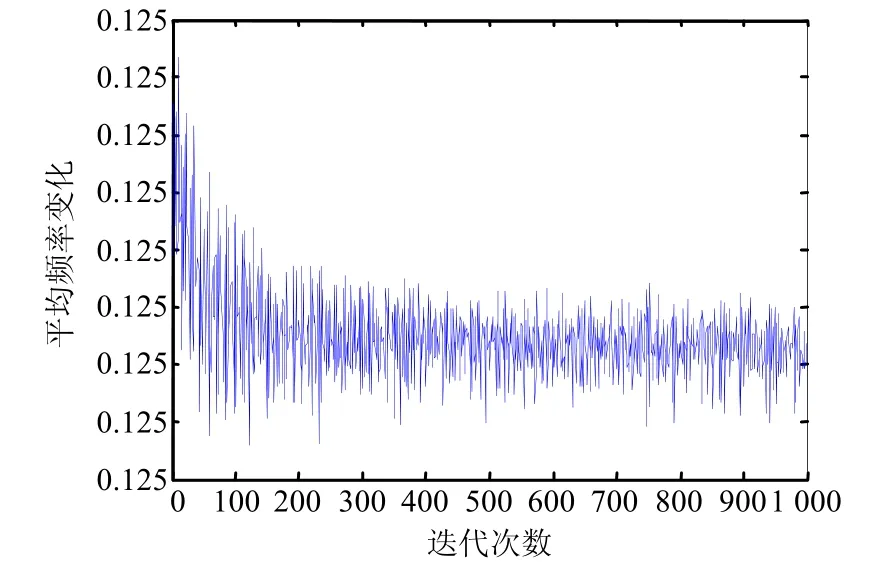
图8 码环平均频率变化过程
5 结 论
[1] 陈大海. 张健,吕幼新. 遥测接收机的一种载波频偏抑制方法[J]. 电子科技大学学报, 2008, 37(5): 720-723.CHEN Da-hai, ZHANG Jian, LÜ You-xin. A new scheme to suppress carrier frequency deviation for telemetry receiver[J]. Journal of University of Electronic Science and Technology of China, 2008, 37(5): 720-723.
[2] 李金海. 高动态GPS接收机基带算法研究及设计[D]. 北京: 中国科学院微电子研究所, 2007.LI Jin-hai. Research and design of baseband algorithms for high dynamic GPS receiver[D]. Beijing: Institute of Microelectronics of Chinese Academy of Sciences, 2007.
[3] ZARLINK SEMICONDUCTOR. GP4020 GPS baseband processor design Manual[EB/OL]. [ 2009-06-10]. http://www.zarlink.com.
[4] 陆大金. 随机过程及其应用[M]. 北京:清华大学出版社,1986.LU Da-jin. Stochastic processes and its applications[M].Beijing: Tsinghua University Press, 1986.
[5] KAPLAN E D, HEGRATY C J. GPS原理与应用[M]. 2版.寇艳红, 译, 北京: 电子工业出版社, 2007.KAPLAN E D, HEGRATY C J. Understanding GPS:Principles and applications[M]. 2nd ed. Translate by KOU Yan-hong. Beijing: Publishing House of Electronics Industry,2007.
[6] PROAKIS J G. Digital communications [M]. 4th ed. Beijing:Publishing House of Electronics Industry, 2001.
[7] JAMES BAO-YEN T. Fundamentals of global positioning system receivers: a software approach[M]. New York: John Wiley & Sons, Inc, 2000.
[8] MAO Wei-lung, TSAO Hen-wai, CHANG Fan-ren. A new fuzzy bandwidth carrier recovery system in GPS for robust phase tracking[J]. IEEE Signal Processing Letters, 2004,11(4): 431-434.
[9] 杨颖, 陈培, 王云, 等. 扩频通信同步系统中锁相环的设计[J]. 哈尔滨工程大学学报, 2010, 32(3): 243-248.YANG Ying, CHEN Pei, WANG Yun, et al. The design of DPLL for carrier synchronization used in spread spectrum communication systems[J]. Journal of Harbin Engineering University, 2010, 31(3): 243-248.
[10] STEPHENS S A, THOMAS J B. Controlled-root formulation for digital phase-locked loops[J]. IEEE Trans on Aerospace and Electronic Systems, 1995, 31(1): 78-95.
[11] ZHANG Wei, ZHANG Ke, BIN Wu-bin. Simulation and analysis of GPS software receiver[C]//Second International Conference on Computer Modeling and Simulation.Washington: IEEE Press, 2010: 314-317.
[12] HUMPHREYS T E, PSIAKI M L, KINTNER P M.Modeling the effects of ionospheric scintillation on GPS carrier phase tracking[J]. IEEE Trans on Aerospace and Electronic Systems, 2010, 46(4): 1624-1637.
