一种基于调制谱的空中目标识别方法
2011-04-24徐利刚苗振奎郑杨凡
徐利刚,苗振奎,郑杨凡
(1.海军驻无锡地区军事代表室,江苏 无锡 214061;2.江苏自动化研究所,江苏 连云港 222006)
目标或目标组成部分的振动或转动会对雷达回波的频谱产生调制,美国海军研究实验室的 Victor C.Chen将这种现象称为微多普勒效应[1]。目前对于空中目标识别是雷达目标识别分类的一个难点。由于飞机旋翼的后向散射截面较小,其产生的回波功率较小,很容易淹没在机身回波和杂波中,并且不同飞机的机身和旋翼的散射截面、旋翼长度、转速和叶片数等都不相同,因此时域检测的方法并不实用。而在频域,由于旋翼的微多普勒频谱与机身回波信号的频谱是分开的,即可用频域中的谱线个数、谱线间隔、谱线宽度作为特征量将不同结构的空中目标进行分类。Rajan Bhalla和 LingHao[2]研究了使用射线追踪法(Shooting and Bouncing Ray,SBR)计算复杂目标的微多普勒,并利用多普勒外推法(dopplerextrapolation scheme)计算了四叶片直升机模型的时频谱,从理论上预测了直升机的微多普勒现象。文献[3]对直升机旋翼回波信号进行了理论分析与计算。文献[4]美国陆军研究实验室使用92GHz连续毫米波雷达对Mi-24“雌鹿”D型直升机的多普勒特征进行测量的报告,分析了直升机目标的多普勒频谱构成。对于空中目标,其调制特征由桨长,桨叶数和桨叶转速决定。它们的回波信号复包络幅度调制特性和瞬时频率从时间上描述了微多普勒现象;频谱展宽调制从空间上描述了微多普勒现象。其中时域的幅度闪烁峰值和脉宽反映飞机桨叶的周期转动特征;频域的谱线个数、谱线间隔、谱线宽度能很好地反映目标的物理结构。综合时频域的这些信息可将空中目标分为直升机类飞机、螺旋桨类飞机、涡扇类飞机。
1 空中目标回波特点
1.1 螺旋桨类飞机
螺旋桨类飞机一般有多个螺旋桨,在巡航时,通常在垂直于大地平面内旋转,其桨叶较短,转速较快。对于有N个桨的螺旋桨类飞机,其合成的调制回波[5]为:

在式(1)中,幅度分量 abk(t),相位分量ψbk( t)分别为
式中,N为桨叶数;fr为桨叶转速;L为有效桨长;f0为雷达载频;λ为雷达波长;θ0是桨叶的旋转初角,即叶片法向波束的夹角;β为雷达波束与旋转平面的夹角。上式表明,旋转部件调制回波基带的幅相分量都受到转速的周期调制。
1.2 直升机类飞机
直升机类飞机主旋翼大而长,巡航时,通常在平行于大地的平面内,其桨叶较长,转速较慢,一般为3~10 r/min。我们只对主旋翼回波感兴趣,暂不考虑叶毂回波和尾旋翼的回波。当旋转桨旋转中心的方位角为零时,旋转中心相对于雷达的径向速度为:v1=vcosβ,直升机类飞机N个桨合成的调制回波与式(1)相同。
1.3 涡扇类飞机
对于涡扇类飞机,一般有多个发动机,即有多个风扇,每个风扇中都有桨毂问题,处理的方法与旋转桨类飞机一样,但是,由于风扇在涵洞内,调制回波受飞机可见度的影响比较明显,调制谱的幅度受飞机的姿态影响也较大。所有风扇合成的调制回波为

2 识别方法
不同空中目标回波的时域复包络幅度调制信息、时域相位信息和频域微多普勒调制特性,与自身物理结构有严格的对应关系。螺旋桨类飞机桨叶数少,桨长较短,转速相对不高,调制回波时域闪烁周期较大,频域出现展宽,双边谱线较少,谱线间隔较大,谱线宽度较宽;直升机类飞机桨叶数少,桨长较长,转速较低,调制回波时域闪烁周期较小,频域出现展宽,双边谱线较多,谱线间隔较小,谱线宽度较宽;涡扇类飞机桨叶数多,桨长短,转速高,时域闪烁周期较大,频域出现展宽,双边谱线较少,谱线间隔较大,谱线宽度较窄。根据不同的调制特征,计算其桨长、桨叶数及桨叶转速,得出目标不同的物理结构,进而将目标进行分类。
其转速、谱线宽度和谱线个数由下式确定:

式中,N为旋转桨个数;fr为旋转桨的转速;fT为谱线间隔;B为谱线宽度;L为旋转桨叶的长度;β为雷达波束与旋转平面的夹角;λ为雷达波长;N1为单边谱线个数。当桨叶数为偶数时,P=1,当桨叶数为奇数时,P=2。
选用参数:雷达重复周期Tr=0.2ms,λ=0.43m,β=0 。补偿目标的多普勒频移,综合回波的时域复包络幅度调制信息、时域相位信息及频域微多普勒调制特性如图1所示。
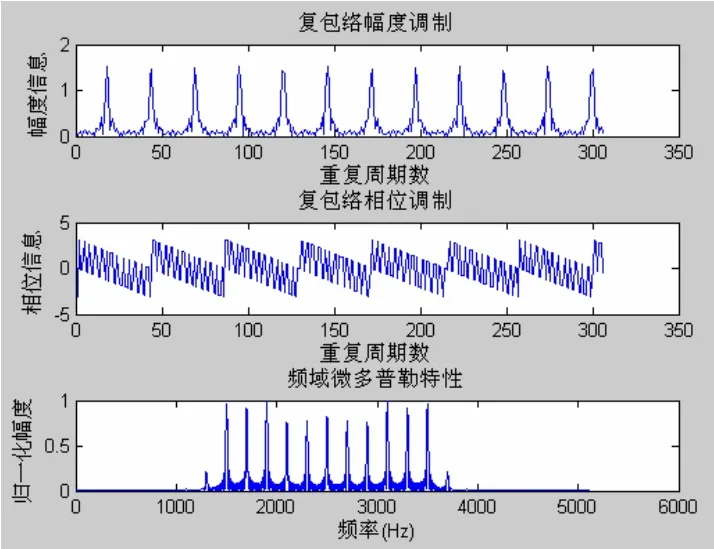
图1 飞机回波特性分析
由图1可得:斜在一个相位周期内,时域调制出现两个波峰,说明N=4,有频域谱线的特征可以计算fT=2 00Hz,N1=6,B=1200Hz
由此确定此目标为螺旋桨类飞机。
如得到回波的时频域调制特性如图2所示。
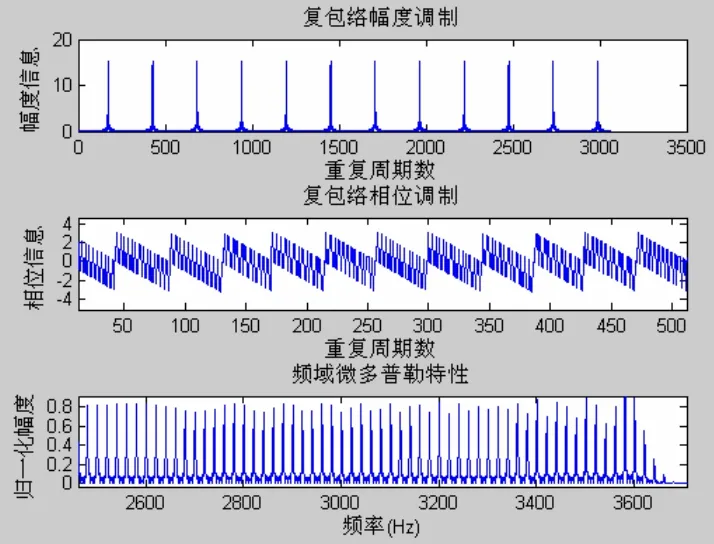
图2 飞机回波特性分析
可得一个相位周期内,时域调制出现两个波峰,说明N=4,有频域谱线的特征可以计算fT=2 0Hz,B=1160Hz
可以确定:fr=5r/s,L=7.94m
确定此目标为直升机类飞机。
如得到回波的时频域调制特性如图3所示。

图3 飞机回波特性分析
可得:一个相位周期内,时域调制出现八个波峰,说明N=16,有频域谱线的特征可以计算fT=8 00Hz,B=800Hz
根据计算,fr=50r/s,L=0.55m
确定此目标为涡扇类飞机。
3 实测数据分析
基于以上研究,对2010年3月在南京某试验场的雷达实测数据进行了分析,选用的雷达带宽:5M;距离单元:30m;天线转速:4s/圈,天线方位面波宽度(3db)3度;雷达重复频率:300us,分析结果如下:
1)目标1
目标1的航迹图如图4所示,时频域信息如图5所示。
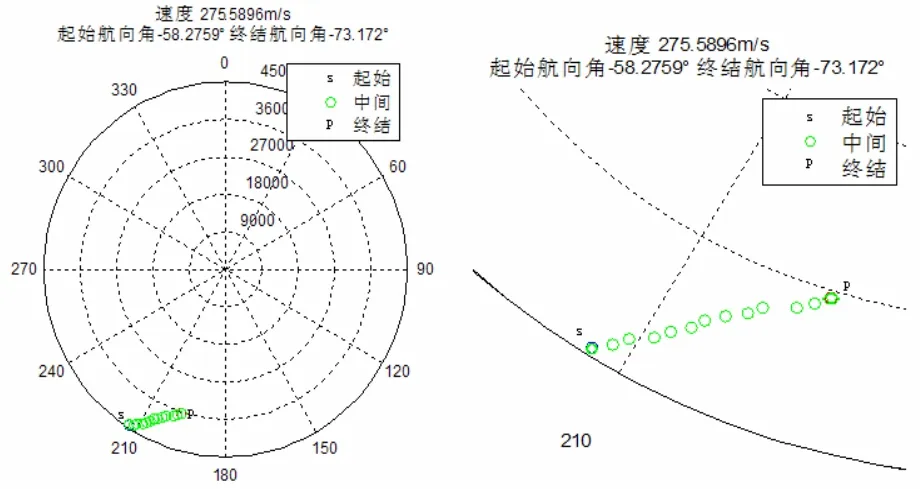
图4 目标1的航迹图

图5 目标1的时频域信息
图5是计算该目标在方位 206.068°,距离36.203km处下200个相关脉冲的结果。从频谱图上看出,谱线出现了展宽,其最大多普勒频率为2133Hz,展宽谱线的单边个数有三根,谱线间隔为216Hz,可计算螺旋桨飞机旋转部件的结构。与理论的fT=PNfr相一致,验证了回波特点的正确性,并且可以估计目标为螺旋桨类飞机。从中提取调制特征,可以为以后目标的个体识别做准备。
2)目标2
目标2的航迹图如图6所示,时频域信息如图7所示。
图7是计算该目标在方位234.199°,距离21.749Km处下200个相关脉冲的结果。由于目标与雷达视线的夹角很小,在主瓣处有明显的副瓣产生。正频率1279Hz处有一个明显的谱线,为多普勒频率。主瓣旁边的副瓣是由于角度太小或机身振动引起的谱线。在2688Hz处的谱线,说明是调制产生的,谱线间隔是1400Hz,与回波特点一致,估计目标是涡扇类飞机。
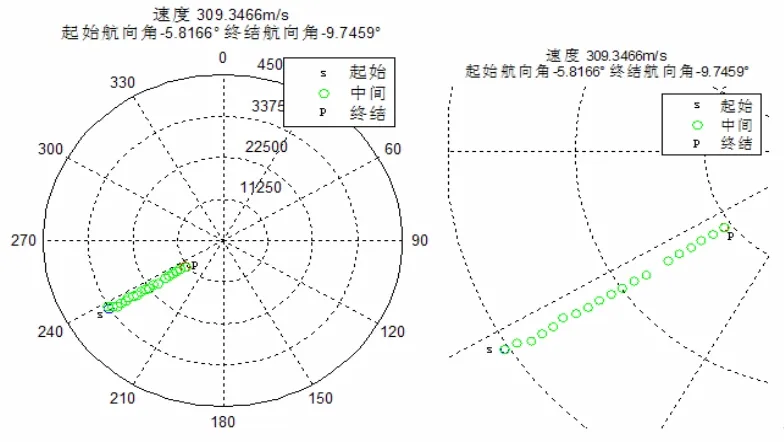
图6 目标2的航迹图
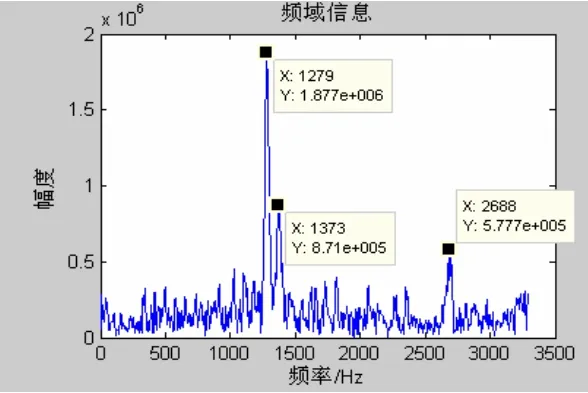
图7 目标2时频域信息
3)目标3
目标3的航迹图如图8所示,时频域信息如图9所示。

图8 目标3的航迹图

图9 目标3的时频域信息
该批次目标跟踪时间很长,目标回波的谱线呈现主谱线附近有明显的副瓣,且幅度很强,其谱线展宽明显,谱线个数较多,可以认为是直升机桨叶调制产生的,估计此目标是直升机类飞机。
4)目标4
目标4的航迹图如图10所示,时频域信息如图11所示。
图11是计算该目标方位164.113°,距离15.115Hm处下200个相关脉冲的结果。飞机的多普勒频率为1644Hz。由于该目标基本是侧向飞行,在采集数据回波中,频域谱线没有展开。原因是飞机侧飞,发动机叶片被挡住而没有出现调制现象,其影响程度取决于可见函数,需进一步探讨。
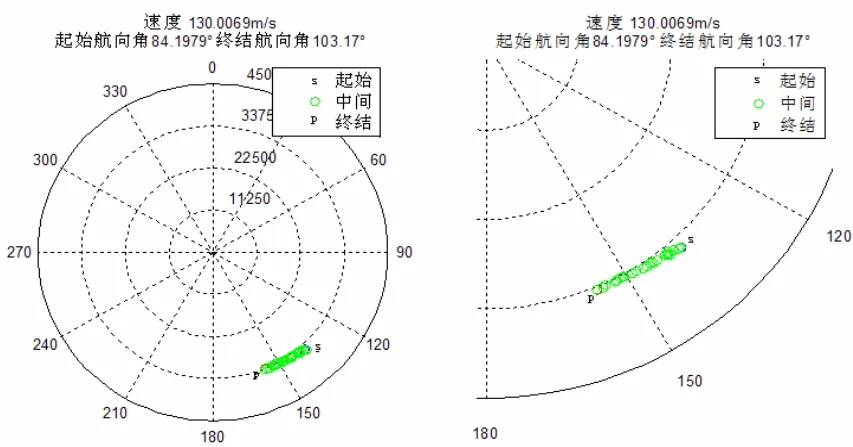
图10 目标4的航迹图
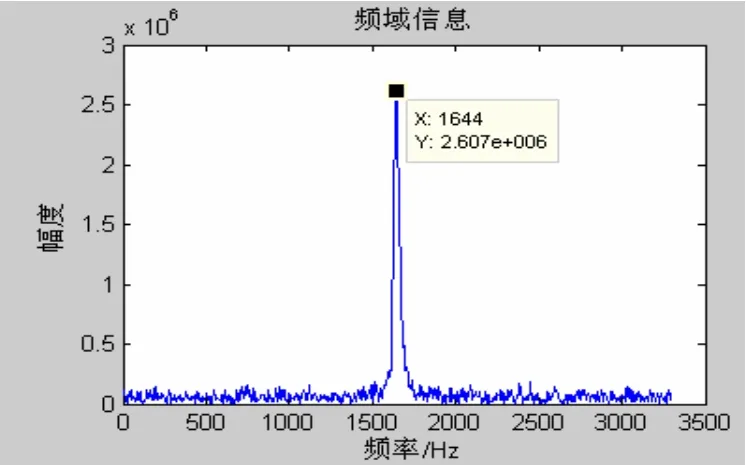
图11 目标4的时频域信息
4 结束语
雷达目标微动特征提取与识别是目前一个新兴的研究领域。它是运动学与雷达信号处理的交叉结合,技术涉及运动建模、时频分析、变采样滤波、雷达成像理论和技术等。本文对各类空中目标回波的特性进行分析,利用时域幅度和相位信息的周期性、频域微多普勒特性体现出来的谱线个数、谱线间隔、谱线宽度等特征将空中目标分为直升机类飞机、螺旋桨类飞机和涡扇类飞机,并利用实测数据进行验证。结果表明该方法可以用来对这些目标进行分类,这为雷达目标综合识别分类提供了可靠的依据。在现代高度自动化的战争中,微多普勒目标识别如何实现智能识别和个体识别有待于进一步研究。
[1]Chen V C,LiF Y,Ho S S.Micro-Doppler effect in radar-phenomenon,model and simulation study[J].IEEE Trans-actions on Aerospace and Electronic Systems,2006,42(1): 2-21.
[2]Rajan B,Ling H.A fast algorithm for simulating Doppler spectra of targets with rotating parts using the shooting and bouncing ray technique[J].IEEE Transactions on antennas and propagation,1998,46(9): 1389-1391.
[3]Chen V C.Radar signatures of rotor blades Proceedings of SPIE on Radar Processing.Orlando,FL,USA,2001,4391: 63-70.
[4]Wellman R J,Silvious JL.Doppler signature measurements of a Mi-24 Hind-D Helicopter at 92 GHz[R].ARL-TR-1637,AD,AirResearchLaboratory,Adelphi Maryland,1998.
[5]丁建江.防空雷达目标识别技术[M].北京:国防工业出版社,2008.
[6]丁鹭飞.雷达原理 [M].第3版.成都:西安电子科技大学出版社,2002.
