基于最小方差模型的自适应控制器设计研究
2011-04-10覃贵礼潘泽锴
覃贵礼,潘泽锴
QIN Gui-li,PAN Ze-Kai
(广西职业技术学院,南宁 530226)
0 引言
在工业过程控制中,采用的自适应校正调节器用是一个参数缓慢变化的过程,在原理上是按系统输出的最小方差自校正控制,被调量通常指受随机扰动影响过程的输出(如纸张单位面积的重量、轧机输出的钢板厚度、反应器工值的出口温度等),这些过程的输出都要求对其定值的波动尽可能小,就是说,其控制目标是使输出的稳态方差尽可能小,而最小方差控制是按最小输出方差为目标设计的自校正控制律。它能有效地抑制随机干扰,算法简单,易于实现,在实际工业过程中具有重要的应用。
1 最小方差控制模型[1]
在自动控制范畴里,最小方差控制的基本思想是先假定u(t)=0,并根据t时刻数据,即已经得到的输出信息Yt=(y(0),y(1),...,y(t))来预报(t+k)时刻的输出Y'=(t=k|Yt),以预报随机扰动ζ(t+k)对输出的影响。由于有延迟k,t时刻的控制输入u(t),以补偿对输出的影响,算出的u(t)即为最小方差控制律。通过不断地进行采样、预报和控制,最后达到输出量的稳态值方差为最小。
假设被控对象(过程)模型为受控的自回归滑动平均差分方程模型(CARMA模型),下式差分方程可表示单输入单输出对象:
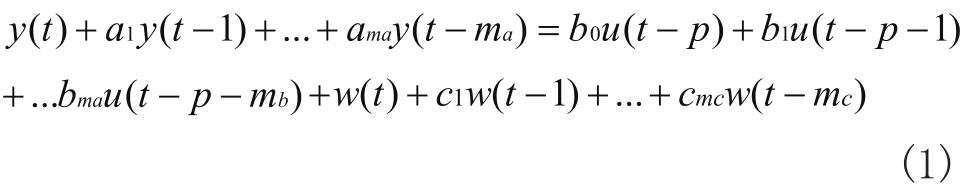
式(1)可以用另一种形式变换为:

在式(2)中参数多项式包括:v(z-1)、H(z-1)、L(z-1)三项,ma、mb、mc依次是它们的阶次。其中,上式中的包涵有输入、输出的白噪声序列:{u(t)}、{y(t)}、{w(t)},p在实际应用中是采用周期的整数倍,这里用作对象延迟。
被控对象单输入单输出的差分方程情形仍可用式(2)表示,并可改写成

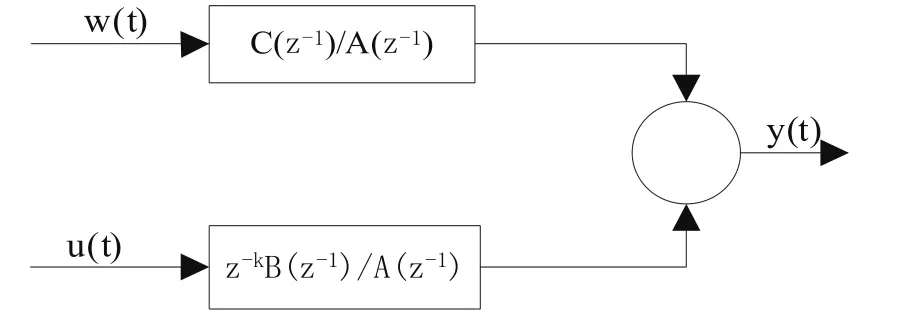
图1 差分变量对象之间的关系
基于以上公式,针对最小方差控制方法的求解过程,被控对象(过程)作下述假定[2]:
1){w(t)}是一个独立的随机序列,它的方差为δ2,均值为0;
2)随机扰动过程ζ(t)=L(z-1){w(t)}/v(z-1) ,v(z-1)、H(z-1)为稳定多项式,它们和F(z-1)的所有零点都分布在单位圆之内,这样可以保证ζ(t)为平稳随机过程。
3)在自校正过程种系统参数是不变的或称“冻结的”。
在假定基础上,根据式(2)可知,输出u(t)、输出y(t)和w(t)之间关系,可用图1来表示。
2 最小方差控制器设计
根据被控对象的差分方程式(2),在推导最小方差预报律时有下列的假设[1,3]:
1)被预报的过程,即由随机扰动说产生的输出是一个具有有理谱密度的平稳随机过程;
2)最优的性能指标是稳态预报误差的方差最小;
3)预报律应当是线性的和物理上可以实现的,即预报律应当是有y(t),y(t+1),… 的线性函数。
在假设的前提下,可以把最小预报误差的方差改写为[4,5]:
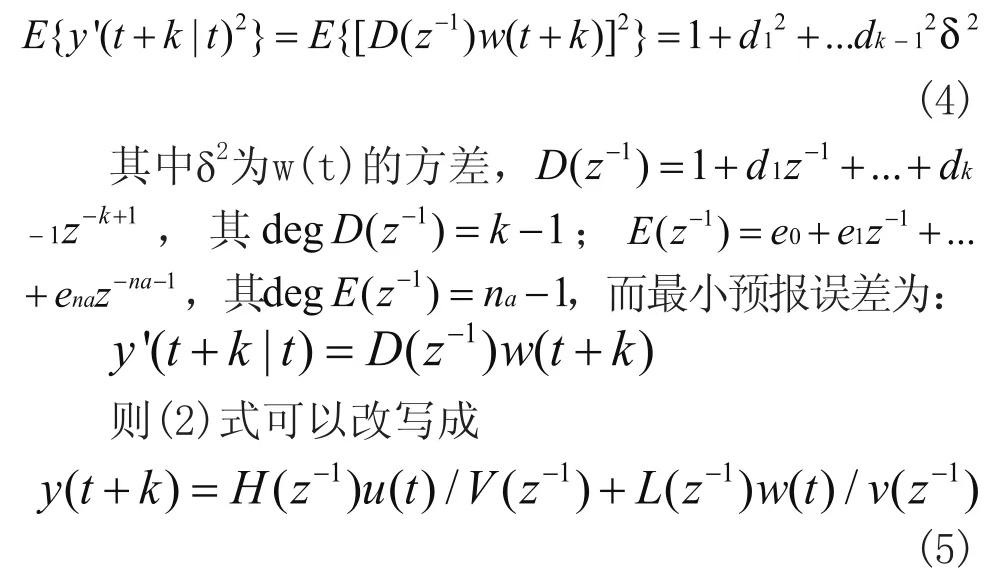
由形成滤波器L(z-1)/v(z-1)可得到ζ(t+k)和w(t+k)的关系式:

若最小方差预报值ζ'(t+k|t)给定为:ζ'(t+k|t)=ζ2(t+k|t),把Diophantine方程L(z-1)=v(z-1)D(z-1)+z-1E(z-1))代入式(6),令ζ'(t+k|t)=ζ(t+k)-ζ'(t+k|t)为y(t)预报误差,可知:

在输出函数为y(t+k),给定值为yr(t)的情况下,最小方差控制的目标就是使两者偏差的方差是最小的。在公式表现出来就是:

若假设yr(t)=0,则上式变成

而式(8)中的y(t+k)由式(5)表示,并且考虑到式(6)、(7)的关系,可以得到

考虑到上式右边括号中第一部分和第二、第三部分是无关的,并且w(.)的均值为零,因而上式可进一步改写为

考虑到上式右边第一项在t时刻是未知的不可控项,因此,要使价值函数R为最小,只有使上式右边的第二项为零,可得

此即为最小方差控制律。由价值函数R关系式可知,当最小方差控制达到时,输出的最小方差E{y2(t+k)}和输出误差y(t+k)分别为

式(10)中δ2为白噪声序列w(.)的方差。
由此最小方差控制所构成的控制系统如图2所示。

图2 最小方差控制系统
3 模型仿真研究
考虑控制系统非线性不确定随机性,仿真对比最小方差模块对整个控制系统输出特性的影响,取受控系统为[6]:
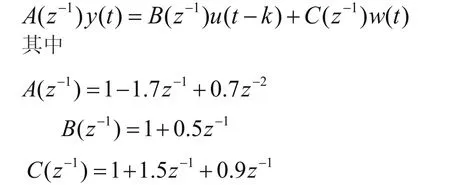
w(t)为高斯白噪声序列N(0,1),(即均值为0,方差δ2=1),设延迟k=1。D(z-1)的阶次为k-1=0,所以D(z-1),Diophantine方程C(z-1)=A(z-1)D(z-1)+z-1E(z-1)代入具体数据得:

根据自校正调节器的最小方差控制策略理论,对上述受控方程的最小方差控制系统进行仿真[7],如图3所示。
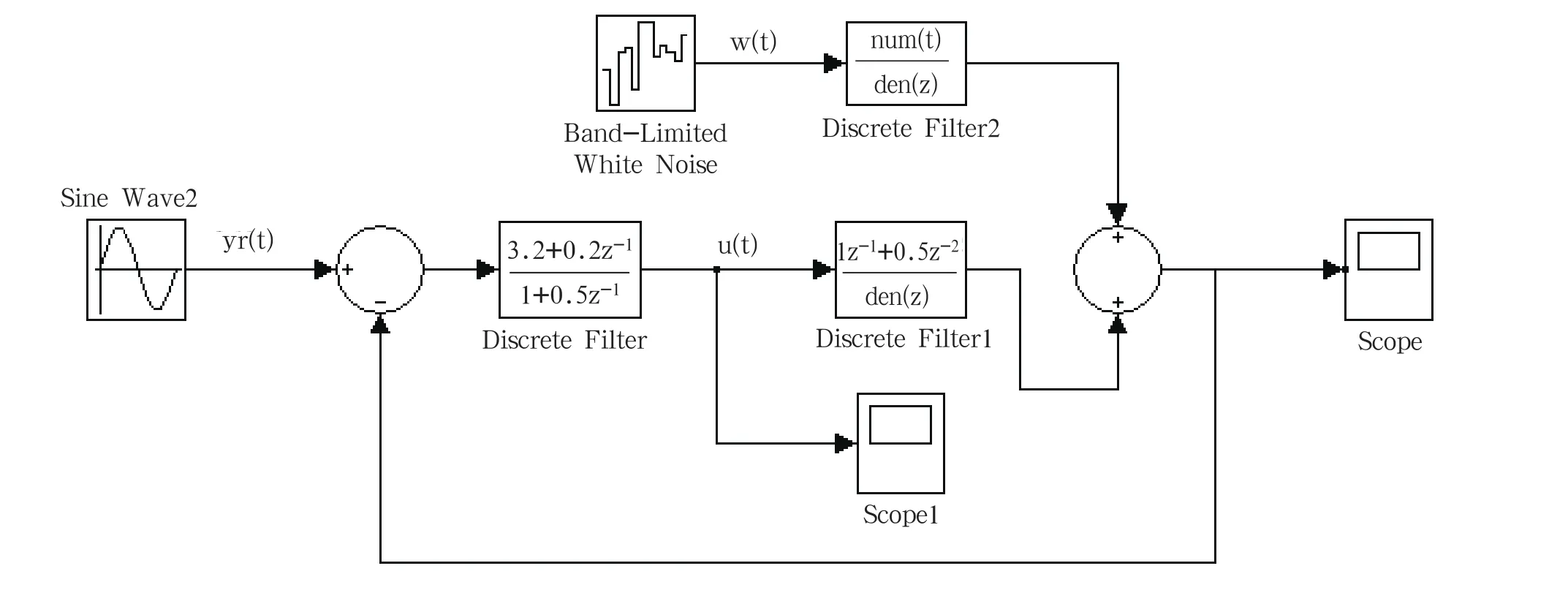
图3 最小方差控制系统仿真
在这个系统中,yr(t)的以正弦波形式输入,幅值调节为3,w(t)为带限白噪声。在时间参数t=0~10s时,y(t)和u(t)都是以示波器形式输出。采用最小方差算法,控制效果如图4所示。如果仅用对象和变量的关系,即是在仿真中缺少最小方差控制Discrete Filter模块,而输入的方式和参数都没有发生改变,在相同的时间范围内,y(t)和u(t)都是以示波器形式输出,控制效果如图5所示。

图4 含最小方差控制模块仿真输出图
比较图4和图5同样的y(t)输出可以看出,图4的曲线变换范围大约为[-4.27.2],图5的曲线变化约为[-1117]。仅采取对象和变量的关系控制的系统振荡很大,而加入最小方差控制环节后系统的稳定性明显的增强。

图5 缺少最小方差控制仿真输出图
由仿真结果可以看出,本文由原理推导出来的方法应用是有效地,具有较快的响应速度。随着自适应机理的建立,改变参数一般化的最小方差控制系统,显示出较好的跟随性;再者,改变输入方式,可以得出不同的输出效果,使系统具有相关领域的兼容性。
4 结束语
最小方差控制是基于最优化原理,即基于某种模型通过使某一目标函数的最优化而设计出所需要的控制作用的控制算法。在本文的叙述,理论分析和仿真结果都表明了所提出最小方差自校正控制方法是简单易行且有效的,它在自校正控制器应用具有更高的控制精度、更快的响应速度、更好的鲁棒性,且适用于离散控制对象。
[1] 谢新民,丁锋.自适应控制系统[M].北京:清华大学出版社,2002.
[2] 沈清波,于德勇.基于变神经网络的非线性最小方差预测控制器[J].系统工程与电子技术,2002,3.
[3] 韩曾晋.自适应控制[M].北京:清华大学出版社,1995.
[4] 梁晓.非最小相位系统的最小方差自适应控制[J].兵工自动化,2004,23.
[5] 张立群,邵惠鹤.基于最小方差控制的闭环辨识信号设计[J].上海交通大学学报,2004,4.
[6] 刘叔军,盖晓华,樊京,崔世林.Matlab7·0控制系统应用与实例[M].北京:机械工业出版社,2006.
[7] 张森,张正亮.MATLAB仿真技术与实例应用教程[M].北京:机械工业出版社,2004.
