基于PSD的光电自准直仪角度测量系统研究
2011-04-10吴年祥
黄 祥,吴年祥
HUANG Xiang,WU Nian-xiang
(安徽国防科技职业学院,六安 237011)
0 引言
自准直仪是利用光学自准直原理,利用小角度测量或可转换为小角度测量的一种常用技术测试仪器,它被广泛用于角度检测、角度测量、自动角度定位环集成等方面,是机械制造、航空航天、计量测试、科学研究等部门必备的常规测量仪器,特别是在精密、超精密定位方面,更有不可替代的作用[5]。考虑到分辨率和结构的要求,选用PSD作为光电探测仪,但是PSD本身是模拟器件,受环境和处理电路中其他器件性能等因素影响较大。本文从PSD的原理出发,通过单片机的软件除法器实时处理PSD电压信号,利用CPLD完成数据的采样和传输,研究了影响测量精度的因素,给出了解决方法。
1 总体电路框图
PSD作为一种光电转换位置敏感探测器,可以把角度等信息直接转换成电信号,实现非电量的电测。一种建立在PSD传感器信号光电自准直仪角度测量系统,输出四路光偏转角度信号,通过I/V转换呈现四路电压信号,对PSD传感器信号采集信号进行二级放大,再通过四路16位的高性能模数转换芯片AD976A将采集来的信号进行模数转换。利用CPLD的实现对AD976A数据采集的数据暂存和数据的传递,并完成四路16位模数转换器与C8051F005微处理器所构成的数据同时采集,分时读出,当CPLD对四路16位AD数据锁存起来后,从CPLD内8位往C8051005系列单片机内传送数据,再利用软件计算出光点的位置,输送给EZUSB接口到上位机,EZ-USB与上位机的通讯口协议一致并由PC接收显示实际测量的参数。原理框图如图1所示。

图1 角度测量系统的原理框图
2 PSD工作原理及光电自准直仪原理
2.1 PSD的工作原理
PSD器件可分为一维器件和二维器件两大类。二维器件又有若干种结构,各类型的PSD结构不同,但其基本原理都是在片状本征半导体硅的表面通过掺杂工艺形成P型层和N型层,从而形成面状的PN结。面状P型层作为光敏面具有均匀的电阻率,在此电阻层的对边用金属制成收集电极。当入射光束落在光敏面上形成光点时,光能将转换成穿过PN结的光电流,此电流在电阻层上以面电流的形式扩散并被器件边沿的电极收集,由于面电阻的作用,当光点位置距各电极距离不同时,各电极收集到的电流强度也不相同,且与光点位置有关。
利用二维PSD,测定两个自由度角度的变化。PSD有五个电极:一个是背压电极,一对用来确定X方向坐标,另一对用来确定Y方向位置坐标。其输出与入射光点的关系式为:
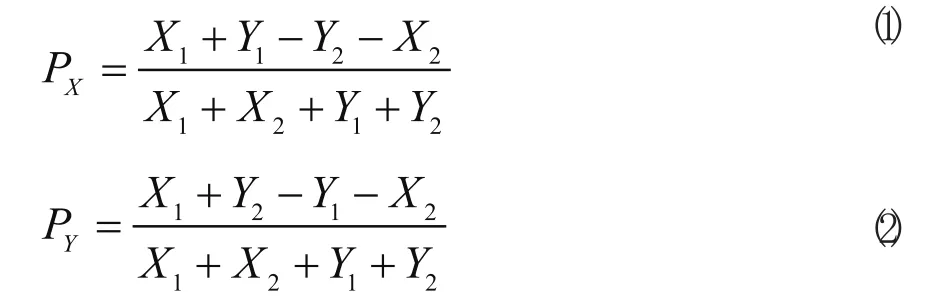
其中X1、Y1、X2、Y2分别为各信号电极的输出电流。PX、PY为入射光点在PSD上的位置坐标(坐标原点在PSD的中心)。
2.2 光电自准直仪原理
自准直仪是利用光学自准直原理和平面镜对光的反射原理。光电自准直仪是自准直技术与光电技术相结合的产物,是自准直仪中测量精度较高、发展历史较短的一类。
光学自准直原理如图2(a)所示,如果反射镜垂直于系统的光轴,在物镜主焦点处物体O1所发出的光经物镜射出后成为一平行光束,经反射镜反射后沿原路线返回,在同一位置O1处形成一个影像,如果反射镜被倾斜一角度δ时,如图2(b)所示,反射光将偏转2δ角,进入物镜后将在O2处成像,入射光轴与反射光轴的夹角亦为2δ,此角从二光轴与O1O2所形成的直角三角形可以看出。所以反射镜的偏角与自准直像的线位移成一种比例关系:S为O与O'的间距。

图2 光学自准直原理
图3就是按照上述原理制成的一种光电自准直仪光路示意图。
3 硬件电路研究与实现
3.1 PSD信号处理单元
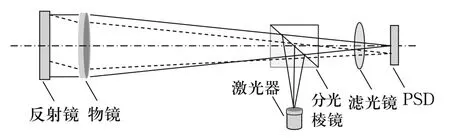
图3 自准直仪光路示意图
PSD器件在受到非均匀光源照射之后,在边缘电极上输出光生电流,且电流值很低,输出电流中还有噪声。这就需要前端处理电路具有很高的输入阻抗和消除干扰信号的功能,首先将PSD的光生电流转化放大成电压,滤除干扰以后,再进行二级放大处理,使放大后的电压值可满足后续处理电路对电压的要求。
3.2 测量系统的控制单元
利用CPLD配合主单片机写信号来完成数据的采样和传输。为确保数据的转换精度,要防止ADC数据的输出对模拟输入通道造成干扰,控制系统电路如图4所示。
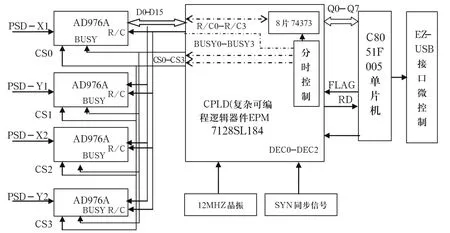
图4 控制系统的框图
在CPLD内部加缓冲锁存器,用缓冲锁存器将ADC的数据输出与单片机的主控制器的总线隔离。即使在下一次ADC转换期间8µs从锁存器读出数据上一次转换结果,也不会影响ADC的其它三路的模拟输入端,从而实现了分时来处理数据,确保数据不丢失和乱码。
AD采集完数据以后,将CPLD内部的数据锁存到74373。单片机通过查询的方法判断(P2.4)CPLD送来FLAG为“1”还是“0”,并确定转换完的A/D数据在CPLD内部锁存器是否存完毕,单片机是否能读。
当单片机读完数据后,单片机把RD位置设为“1”或“0”, 判断数据是否可以往锁存器里写。当单片机读完数据时,CPLD内部电路使FLAG位生成“1”态。
当同步信号(SYN)上升沿到来的时候,程序开始运行。通过AD976A的R/C和CS的不同状态,实现同时采集四个AD器件中的数据,在CPLD内部通过8片74373中锁存这16位的数据。直到若干个时钟后,当四个R/C为高电平时,顺序为CS0,CS1,CS2,CS3为下降沿时,数据分别从第1,2,3,4 AD中读出来数据,用分时控制模块内的分频器,逻辑门通过74373的G输出控制端可以实现分时输出。DECO-DEC2是单片机给CPLD的信号。
从CPLD内8位往C8051005系列单片机内传送数据,再利用单片机进行软件除法计算出光点的位置,使用四路模拟量输入口,P0口向EZ-USB芯片输出数据,到上位机,进行实时显示,P1口向LED面板输出数据,P2和P3用作控制信号输入输出口。
4 系统软件
系统软件主要进行初始化(设定通讯方式,中断触发方式,启动计数器等)、功能键查询、数据通讯、超量程判别、去掉粗大误差、数字滤波、数值运算、非线性误差补偿和根据功能的要求输出测量结果等。
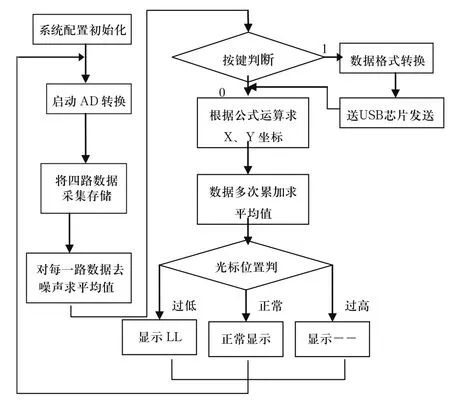
图5 程序流程图
主程序算法较简单,首先分时采集存储四路模拟信号,然后对每路的存储信号去掉最高值和最低值后求平均值。如果有命令发送,则将得到的平均值送EZ-USB芯片发送。执行完毕由单片机对四个平均值根据公式进行运算,求得X和Y的坐标;然后将坐标值以移位方式送入数组存储,再对数组中的坐标值求平均值,最后将计算结果送前面板LED显示。具体程序流程图如图5所示。
5 系统调试与总结
由于旋转反射镜无法读取转动角度,所以无法进行刻度校准、线性度检测、误差校准等实验,只能粗略地做稳定性仿真实验,生成的稳定性曲线如图6所示。
图6中X轴上每一刻度代表5分钟。由Y曲线可得,在一小时内,Y的坐标上下浮动了0.5;由X曲线可得,X的坐标上下浮动了0.4。测量范围为800'',所以稳定性满足要求。
6 结束语
与传统的感光器件相比,PSD具有高灵敏度和良好的瞬态响应特性,处理电路简单。由于对C8051F单片机进行软件除法编程,从而简化了电路避免了噪声干扰,利用了CPLD对整个系统数据处理进行有效的控制,分时进行。通过对实际电路的调试,此电路适合用于静态测量场所,而且对运动中的连续角度测量也可以实现,但对运动中的角度测量精度,有待进一步提高。
[1] 李德春.二维光学内反射微小角度传感器的研究[D].天津:天津大学,2004.
[2] 童长飞.C8051F系列单片机开发与C语言编程[M].北京:北京航空航天大学出版社,2005:56-105.
[3] 铁玲玲.光电自准直仪[J].机械工程师.2005,4:107.
[4] 李佳,樊玉铭.基于PSD的光电自准直仪测量空间两平板相对倾角变形[J].电子测量技术,2007,30(8):53-55.
[5] 欧同庚,陈志高,等.CCD光电自准直仪工作原理及误差源分析[J].大地测量与地球动力学,2007,6:98.
[6] 张迎新,雷文,姚静波.C8051F系列SOC单片机原理及应用[M].北京:国防工业出版社,2006:273-308.
