参数化轨迹导引三维扫描与点云对齐研究
2011-04-10秦现生张雪峰张培培
蔡 勇,秦现生,张雪峰,张培培,单 宁
CAI Yong1,QIN Xian-sheng1,ZHANG Xue-feng1,ZHANG Pei-pei1,SHAN Ning2
(1. 西北工业大学 机电学院,西安 710072;2. 武警工程学院 装备运输系,西安 710086)
0 引言
全貌立体视觉测量是近几十年发展起来的非接触测量技术,已广泛应用于国防、工业、建筑等工程实践中[1]。在三维视觉测量过程中,由于摄像机视场限制或被测物内凹导致的自遮挡等多种因素,通常需要从多角度或多摄像机分别采集被测物表面信息。所获与扫描仪各实时位姿相关的三维点集合为多视点云,最终需归一到世界坐标系下,称多视点云对齐(registration)[2]。
目前有多种采集多视点云与对齐的方法。已有如双经纬仪法[3],利用两台经纬仪观测被测物表面或邻近的控制点空间坐标,求得摄像机在不同测量位置坐标系到双经纬仪所在世界坐标系的转换对齐。类似的,通过激光跟踪仪[4]或激光设备[5]确定空间标记点坐标,精度更高。求解已知坐标的空间特征点在各图像中不同位置来对齐局部点云,或跟踪局部摄像机坐标系原点在世界坐标系中的坐标值,随时向世界坐标系转换局部摄像机所获数据。这些方法转换次数少,使效率与精度都较高,但都是属于点测量,匹配点冗余少,且获得全局点的真实坐标较为困难,拍摄角度难以控制,易遮挡。Besl提出的ICP(Iterative Closed Point)[6]及其改进算法[7]是目前一种基本对齐算法。该算法对起始状态要求很严,否则易产生误匹配而陷入局部极小值,每次迭代都需计算目标点集内每个点在参考点集内对应点,导致计算量很大。此外,可以借助外部移动或转动设备引导扫描,如根据精密旋转台或移动平台[8]运动对齐各局部数据,由于移动机构精度高,依预定摄像机拍摄视角规划移动路径,令全貌测量数据完整、冗余量可控。其不足是定制的运动设备会使系统柔性和适应性下降,制造成本高昂。
为了提高系统移动的柔性和对齐效率,提出基于通用型关节机器人引导扫描仪的全貌测量新方法。根据已规划扫描路径,利用运动学逆解求出各关节转角范围函数。通过两次移动机器人所获图像与末端执行器位移信息,导出扫描仪下三维点云数据向世界坐标系的转换矩阵。并按图像重叠比例给出扫描路径中拍摄点的各关节位姿,指导扫描器拍摄并进行数据对齐。
1 参数化扫描轨迹规划
1.1 扫描轨迹运动学逆解
设计选用全转动关节型ABB-IBR140-M2000型机器人,具有6个自由度,所有6关节均为旋转关节。其使用前置D-H方法对机器人进行运动学描述,各连杆坐标系位置如图1所示。
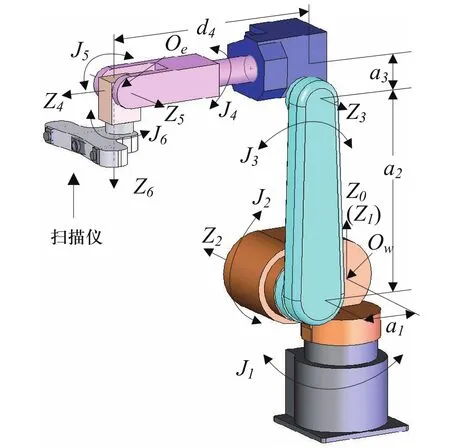
图1 六关节机器人各关节前置D-H方法参数
各旋转关节Ji(i=1,2,…,6)基本参数的范围如表1所示。
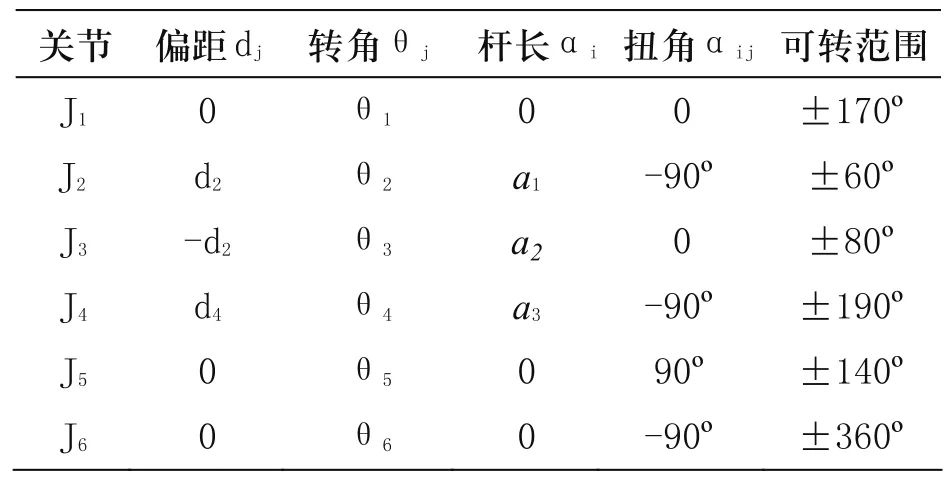
表1 前置D-H坐标系6关节机器人相邻连杆参数
基于前置D-H方法第i个关节与相邻的第i+1个关节坐标转换矩阵Mii+1为:

通过各个关节的依次转换,最终总转换矩阵为各关节转换矩阵的连乘:

根据Pieper准则,此类型机器人的后3个轴线交于共同的一点,可以得到其运动学逆问题(IKP)的解析封闭解。机器人构件d4的末端点即J4,J5,J6共有交点Oe作为机器人末端位置点。机器人基础坐标系在第一、二轴的交点Ow作为扫描系统世界坐标系原点。根据末端位置XL(xL,yL,zL)求解转换矩阵M16,就可得到各关节转角范围函数。最终可解得各关节运动学逆问题结果。
1.2 机器人逆运动学结果仿真
对空间所占三维尺寸接近的被测物进行全貌测量时,可以利用扫描仪对其进行环形围绕扫描。根据被测物与机器人基座距离,确定螺旋线参数方程为:
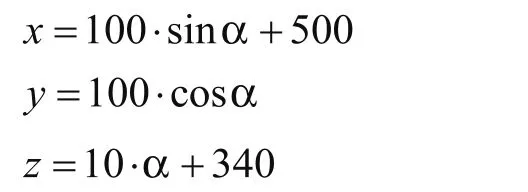
依据此参数化轨迹参数方程,机器人运动学逆解轨迹规划运动范围仿真如图2所示。
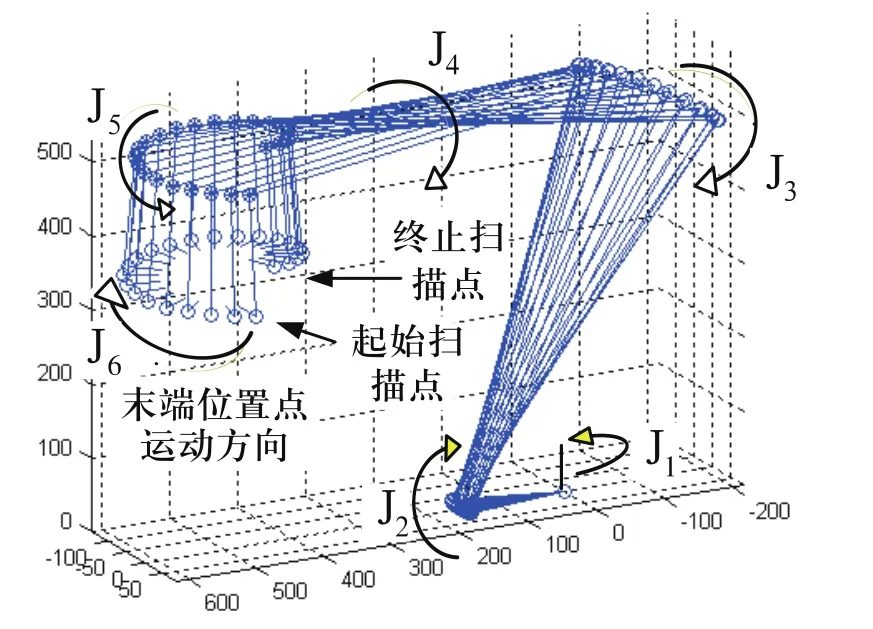
图2 依规划轨迹扫描关节机器人逆解结果
2 多位置扫描数据对齐
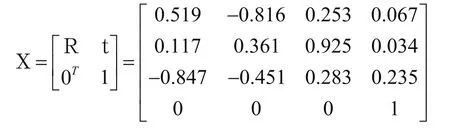
扫描仪的三维数据获得原理是主动结构光测量方式之一,由投影仪投出正弦光栅图案,两个摄像机组成的交汇轴双目视觉系统拍摄被物体表面形状调制而扭曲的光栅图案,经解相算法处理图像,获得被测物表面三维点云[9]。扫描仪拍摄扫描三维点云中某点数据XL(xL,yL,zL)是其摄像机坐标系下数据,需要转换到机器人基座所在的世界坐标系下的Xw(xw,yw,zw) 。若求解出扫描仪坐标系下点XL与机器人末端坐标系下点Xw之间的旋转矩阵R和平移向量t,就可以通过R与t组合的齐次转换矩阵X将多个不同位置的扫描点云数据对齐到世界坐标系下。下面分别求解R与t。
操纵机器人,从两个不同的空间点扫描被测物,可获得某特征点两个不同的扫描仪坐标系下齐次坐标Xc1(xc1,yc1,zc1,1)T,Xc2(xc2,yc2,zc2,1)T,通过标定扫描仪中的摄像机,分别获得扫描仪在两点之间的外参变化Rc与tc,其组合的4×4齐次转换矩阵C满足:

同时,末端执行器移动前后两点的齐次坐标Xd1(xd1,yd1,zd1,1)T,Xd2(xd2,yd2,zd2,1)T则由机器人控制器读出并求解其间的实际旋转Rd和平移向量Td,构成了机器人末端执行器4×4齐次移动矩阵D。两点间关系为:

而扫描仪图像点中与机器人之间的点转换关系为:
Xc1=X.Xd1;Xc2=X.Xd2,其中X为待求的扫描仪到末端执行器的齐次转换矩阵。由以上及式(3)-式(4)可以推出:
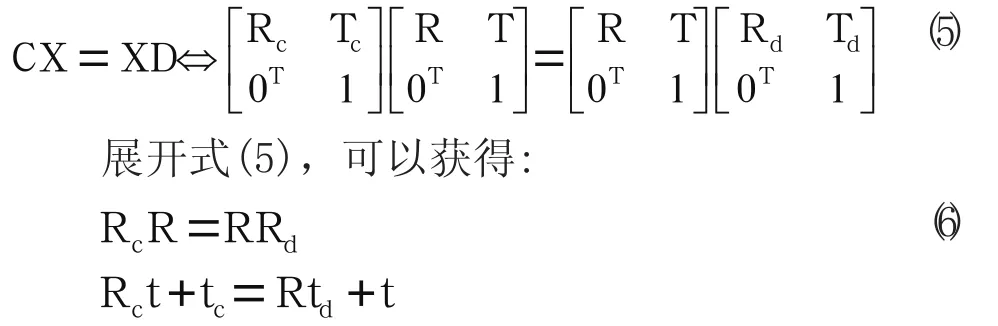
其中,仅R与t未知,构成扫描仪中摄像机坐标系到机器人末端执行器之间的转换矩阵。
实际求解时,操纵机器人末端执行器移动到不同两点1与2,可得四个关系式:
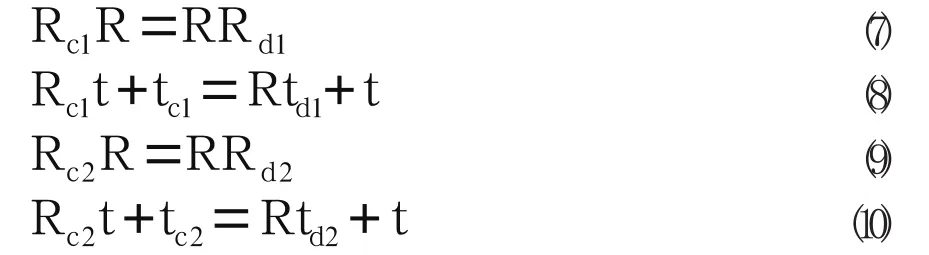
其中的Rc1、tc1、Rc2、tc2分别由两次移动前后的3次摄像机标定所得外参数求得。Rd1、td1、Rd2、td2则由机器人移动前后控制器给出3点空间位姿参数求得。求解式(7)、(9)可得R;代入式(8)、(10)求解可得t。只要两次移动的旋转轴互不平行,且不是纯平移运动时,由R与t构成的转换矩阵X是唯一确定的。
3 实验与精度分析
3.1 扫描仪标定与对齐转换矩阵求解
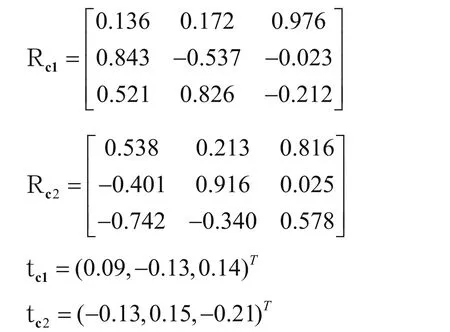
扫描系统固定在框架内,安装于机器人末端执行器上。摄像机选用Basler-piA2400黑白数字摄像机,分辨率为2448 pixel×2050 pixel,镜头焦距12mm,单次光栅扫描范围在物距为120mm时,测量范围为100mm×100mm。理论上的测量精度可达到100/2050=0.05mm。操纵机器人移动,距离过大,会使扫描仪摄像机的共同视场减小,距离过小又会使结果准确度下降。两次移动从世界坐标点(0.05,-0.09,0.33),到1点(0.15,0.04,0.47)和2点(0.03,0.20,0.27)。
移动前后标定的三个外参数的旋转矩阵和平移向量分别为:
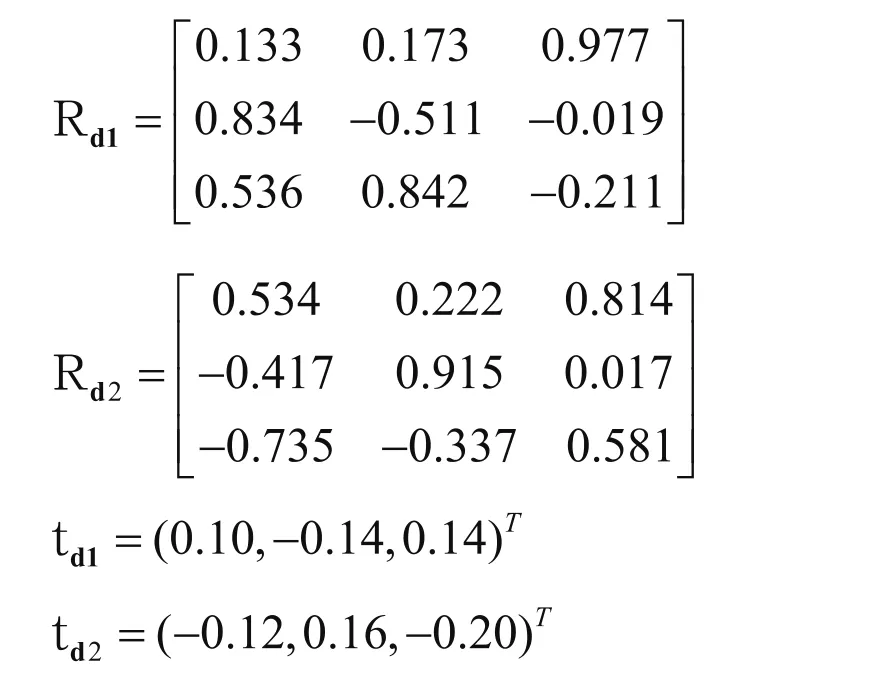
控制器读出末端执行器旋转矩阵与平移向量分别为:
将(7)-(10),代入上述值,求解得到的转换矩阵X为:
3.2 扫描与点云对齐
考虑精度与效率因素,选择点云重叠比例为20%。拍摄点旋转每π/4角度进行一次拍摄,由扫描仪在各拍摄点所获图像求解的点云坐标经X转换后结果如表2所示。
单次扫描范围约为100mm×100mm,对齐结果如图3所示,(1)-(8)为环绕目标扫描的摄像机的局部点云数据,(9)为相邻点云拍摄中介靶标定位对齐后的数据。在Imageware软件中检查点云对齐处剔除奇异点后误差最大为0.086mm。
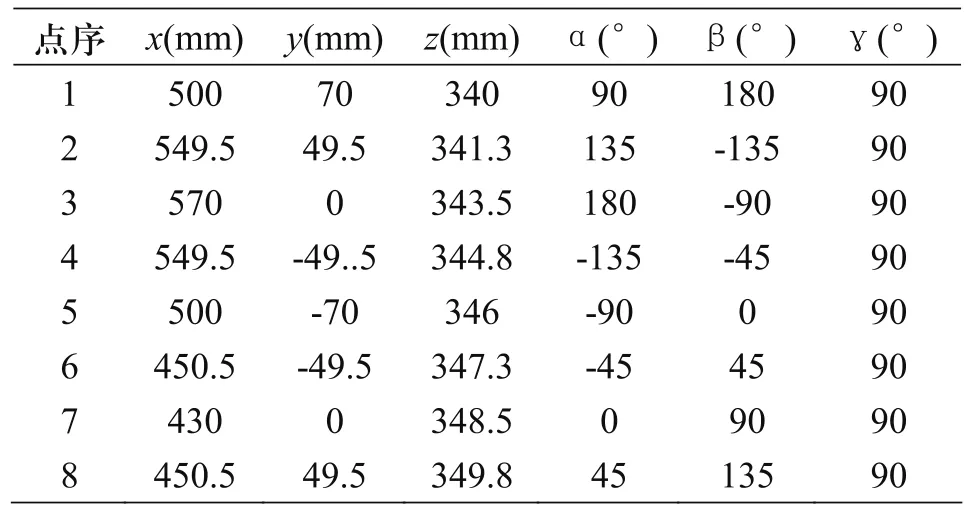
表2 扫描仪在各拍摄点的空间坐标与姿态
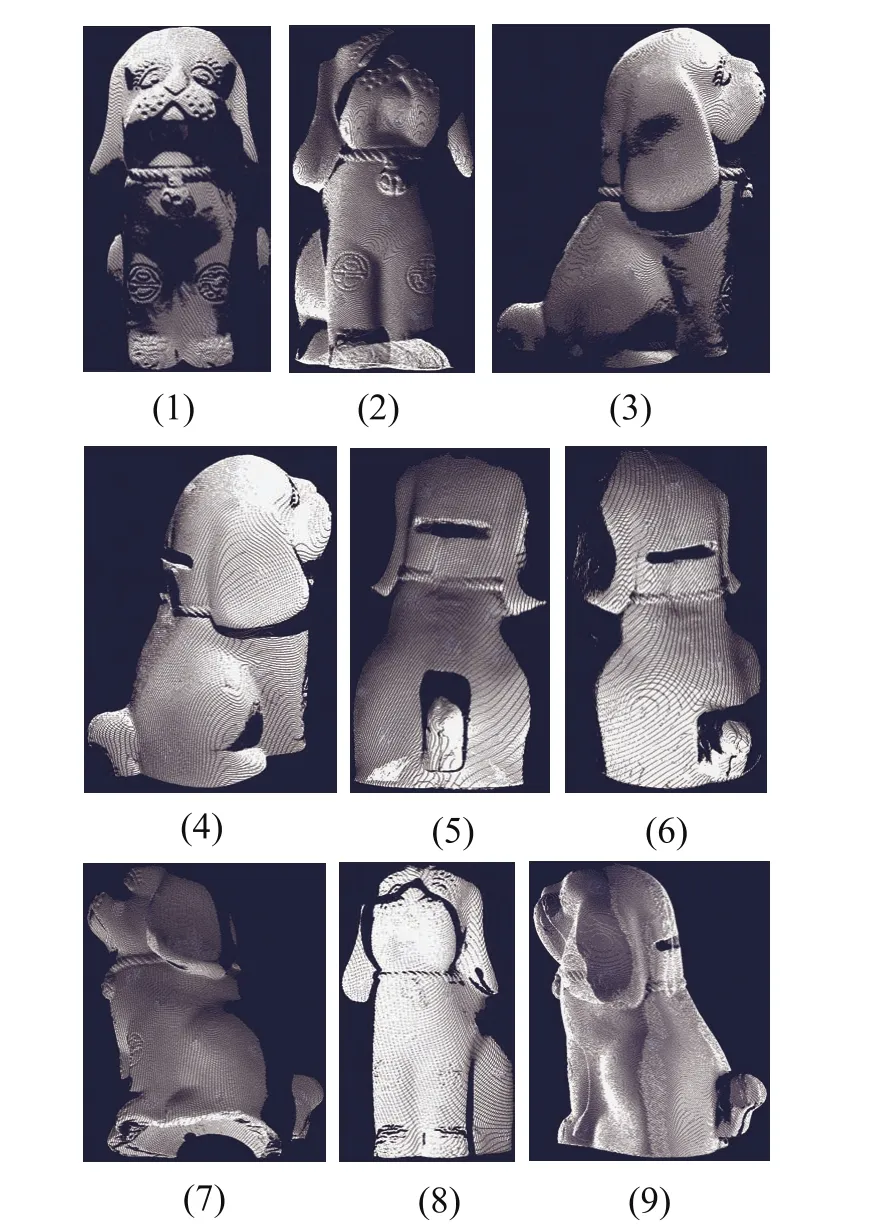
图3 各角度采集点云数据(1)-(8)及相邻点云(6)与(7)的对齐结果(9)
3.3 精度与效率分析
在影响精度的方面,被测物经扫描转换为计算机模型的各个步骤都会带入不同程度的误差。上述最大对齐误差即为多种误差的综合。经分析发现主要的误差与可能的修正方式如下:
1)点云获取误差:依照扫描仪自身标定结论,其精度指标最大不超过0.03mm。通过提高内部图像处理算法精度减少误差,改善扫描结果。
2)点云对齐误差:点云对齐矩阵X求解时,计算转换矩阵存在计算舍入与量化误差,导致各旋转矩阵R正交性不一致。增加检验其正交性,并进行多次计算平差,可以减少转换对齐误差。
3)机器人运动误差:控制器与末端执行器之间需经过多关节转换,每次转换存在累积误差并被逐级放大。通过增加初始端关节的刚度,并进行多次标定,寻找出误差范围并取均方值,代入机器人控制器中以补偿移动误差。
4)扫描仪摄像机系统误差与标定误差:摄像机系统标定一直是难点问题,目前标定精度较高,一次标定在多次扫描中可重复。若选用更高质量光学镜头,可以最大程度降低摄像机导入误差。
5)其他误差:如扫描仪投影的光栅条纹误差;图像采集时的环境光影响导致图像边缘提取误差;点云后期处理误差等。需要在操作中各个环节上控制干扰,但同时也引起了效率的下降。
在效率方面,先使用B方法进行比较:参考文献[8]中部分设置进行扫描。利用定制的环形平台方式。平台导轨半径340mm,调整安装座修正扫描仪转动半径至120mm,通过环形平台精确分度控制点确定扫描仪拍摄位姿,取8点环绕被测物扫描采集点云。继续使用C方法比较:依被测物位置,使用标尺标记8处拍摄点,手工将扫描仪放置于各拍摄点采集点云,利用被测物表面密布标记点方式对齐点云,后期需要修补数据中的标记点缺失点云。将B方法与C方法结合本文所提A方法的各步骤耗时与最终精度如表3所示。可见在点云对齐精度差别不大的情况下,本文提出方法可减少大量操作时间。
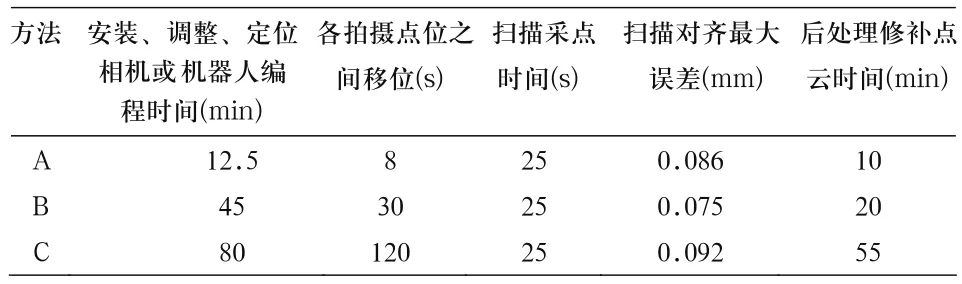
表3 三种扫描方式的效率比较
4 结论
提出了参数化轨迹导引机器人进行多视角全貌扫描新方法。确定关节机器人结构参数,对于参数化扫描路径进行了仿真与实际运行,同时分析了扫描后的点云对齐原理,导出转换矩阵。在范围250mm×80mm×80mm被测物所在空间内,对齐精度小于0.086mm。点云数据对齐的实验结果表明,方法操作可行,有效提高效率,为点云获取和对齐方式提供了新的思路。
[1] 叶声华,秦树人.现代测试计量技术及仪器的发展[J].中国测试,2009,35 (02):1-7.
[2] Huber DF,Hebert M. Fully automatic registration of multiple 3D data sets[J].Image and Vision Computing,2003,21(7):637-650.
[3] 张福民,曲兴华,叶声华.大尺寸测量中多传感器的融合[J].光学精密工程,2008,16 (07):1236-1240.
[4] 卢成静,黄桂平,李广云.数字摄影测量用于天线热变形测量的精度测试[J].测绘通报,2007,(07):163-165.
[5] Mautz Rainer.Overview of Current Indoor Positioning Systems[J].Geodesy and Cartography,2009,35 (1):18-22.
[6] Besl PJ,McKay ND.A method for registration of 3-D shapes[J].IEEE Transactions on pattern analysis and machine intelligence,1992:239-256.
[7] ZinBer T,Schmidt J,Niemann H.A refined ICP algorithm for robust 3-D correspondence estimation[C].proceedings of the International Conference on Image Processing,Barcelona: IEEE,2003.695-698.
[8] 金熠,翟超,邢晓正,等.基于面阵CCD的大视场在线检测系统研究[J].计量学报,2007,28(04):306-310.
[9] 张启灿.动态过程三维面形测量技术研究[D].成都:四川大学,2005.
