升力体机动飞行器气动布局概念设计
2011-04-07肖光明桂业伟
唐 伟,曾 磊,冯 毅,3,肖光明,3,桂业伟
(1.空气动力学国家重点实验室,四川 绵阳 621000;2.中国空气动力研究与发展中心,四川 绵阳 621000;3.清华大学航天航空学院,北京 100084)
0 引言
高超声速飞行器的机动飞行极富挑战,而高超声速机动飞行器研制最关键的问题是获得满足防热和操稳要求的高升阻比布局。由于升力体布局可以容易地获得需要的升阻比和稳定配平,因此自20世纪50年代起,美国和前苏联就开始了升力体布局的研究工作[1-2]。NASA在Ames进行了M1和M2的布局研究,并最终在Dryden进行了M2F1、M2F2和M2F3的飞行试验;Langley的早期研究工作集中在HL-10的试验中;空军的早期研究工作集中在WADDⅡ上,还研究了MDF系列升力体。超轨道再入综合环境试验计划研究了SORTIE族外形与鸭翼、升降副翼、襟翼、弯头、弯体及喷气襟翼等各种操纵装置的效率匹配问题。飞行动力学实验室FDL则通过对高超声速飞行器布局基本原理的研究,系统开展了翼面后掠角、前缘半径、头部半径、钝度比、厚度比、平面形状、平面角、横截面面积、升力体分类等参数影响性研究,归纳总结了三类升力再入的候选外形:翼身组合体、升力体和融合体,并提出了四个完全可以接受的构型设计:FDL-5、FDL-6、FDL-7及 FDL-8,它们后来又演变发展到X-24,并对动能高飞(Dynamic Soar)X-20、航天飞机及空天飞机产生决定性的影响。此外,对升力体概念的研究工作还包括钝升力体、椭圆体加尾翼概念、变后掠翼概念、斜翼升力体概念,以及菱柱体、钝菱柱体、变后掠菱柱体、扁豆体、弯体等布局概念。近年来的典型升力体构型包括 X-33、X-38、HYFLEX、ECAV等。
为开展高超声速机动飞行器的布局方案设计,我们先后研究了多类机动弹头的气动布局及气动/飞行性能,包括双椭圆截面外形[3]、二次曲线非圆截面弹身[4]、控制舵椭圆截面[5]、通用大气飞行器[6]等布局方案。本文提出了一种新的升力体机动飞行器气动布局方案,进行了机体的优化设计,并进行了控制舵的匹配设计,研究了飞行器的气动特性和操纵效率问题。研究表明,该方案可以获得较高的配平升阻比及配平攻角,有较高的机动控制效率,是高超声速飞行器实现高机动的潜在可行方案。
1 布局方案设计及优化
气动布局设计的首要工作是飞行器技战术指标的确定及气动布局方案的选择。本文首先将飞行器的尺寸限制在长4m、半径1m的尺度范围内,并要求其高超声速升阻比不小于2.0,配平攻角范围为±40°。设计考虑的约束还包括静态稳定性、动态稳定性、操纵控制方式、操纵效率、防热基本要求、较大的内部装填容积及较大的容积利用率等。
在进行方案设计时,首先利用二次曲线进行横截面设计,并利用模线设计方法形成升力体机身;其次,利用多目标优化设计和修正的内伏牛顿理论对机身进行优化以使弹身具备较大的升阻比、较大的升力及升力线斜率;第三,根据空间尺寸限制及操稳特性要求进行控制舵的匹配设计;最后,为提高配平控制效率,对质心位置及控制舵偏转进行了研究分析。
采用如上方法并经优化及匹配设计后获得的气动布局如图1所示。其布局由钝锥、二次曲线横截面后体和三个全动式梯形控制舵构成。由于受到内部装填尺寸的限制,机体底部横截面上表面采用了椭圆曲线,二次曲线形状参数为0.3,下表面为双曲线,二次曲线形状参数为0.9。为获得高的控制效率,采用了梯形全动控制舵,并将舵面设计安装在远离质心的部位,以获得较大的力臂。同时,控制面还必须与弹体在尺寸和面积上相匹配,一方面确保飞行器获得合理的配平控制效率,一方面也使得控制面的气动力及气动热环境处于可以接受的范围内。为便于防热,控制舵采用了65°后掠角,前缘半径选取为20mm,舵根及舵稍截面最大厚度分别为70mm及50mm,转轴在舵面最大厚度处,且垂直于机体进行转动。
图1 升力体布局Fig.1 Lift body with flaps
方向舵安装在机体对称面内,而水平控制舵安装在机体理论体轴的上方,如此设计的目的是充分利用质心位置与控制舵在铅垂平面内的距离,从而使得舵面产生抬头的俯仰力矩。通过质心位置的设计和水平舵面安装高度的匹配设计,确保飞行器可以利用较大舵偏角产生大配平攻角,有利于增加减速效果,并在中低空时利用较小的舵偏角产生中等配平攻角,有利于舵面的热防护。如果水平控制舵安装在质心位置的下方,一般仅能产生低头力矩,如果用较小的舵偏角实现长时间小攻角配平飞行,则无法实现大攻角减速的目的。
2 气动特性分析
为预测带控制舵升力体飞行器的高超声速气动特性,采用了推广发展的内伏牛顿理论,其气动力预测精度在多种气动布局气动特性预测及气动布局设计中得当了验证[3-6],基本满足方案论证和初步设计阶段对气动系数的精度需求。
图2及图3给出了本文方案在无舵偏时的升力系数CL及升阻比L/D随攻角α及马赫数M变化的规律。总体上看,在高超声速范围内,15°攻角附近的升阻比可以达到2.0以上,而且升力系数大于0.5时,升力线斜率也较大,满足对升阻比的设计要求。而圆截面布局的最大升阻比一般在1.5左右。
静不稳定设计是带控制舵双锥体飞行器气动设计的主要特点,因此本文也在机体优化时考虑了机体的静不稳定设计问题。图4及图5给出了飞行器压心系数Xcp随攻角及马赫数的变化规律,以及马赫数7.0时不同质心系数Xcg下俯仰舵偏角δp对应的配平攻角αt变化规律。从压心特性看,控制舵的存在使得飞行器的压心位置十分显著地后移,压心在攻角大于15°后变化相对比较平缓,而且与圆截面布局相比,椭圆截面布局具有更好的操纵性。从不同质心系数时水平控制舵的控制效率看,随质心系数的减小,控制舵的配平效率下降,由于飞行轨道规划要求飞行器的控制系统同时兼顾大攻角配平和中小攻角配平,因此质心系数必须合理选取。此外,质心系数为0.66时,由于采用了上置水平控制舵,因此舵面只需要很小的偏转就可以达到15°左右的配平,而为实现40°左右的配平,舵偏角也只需要偏转22°左右,此时的舵面理论攻角也仅为18°左右。当然,控制效率问题还需要进一步分析。

图2 升力系数变化规律Fig.2 Lift coefficicent
图3 升阻比特性Fig.3 Lift to drag ratio
图4 压心变化规律Fig.4 Center of pressure
图5 配平效率Fig.5 Trimming effectiveness
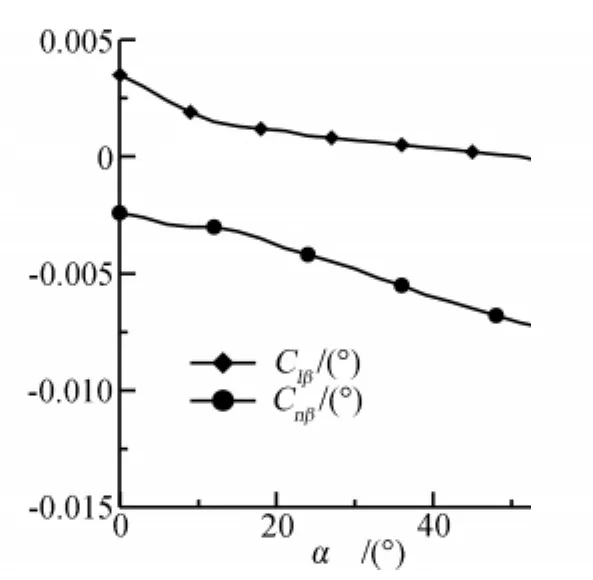
图6 横侧向稳定性导数Fig.6 Lateral-directional static stability
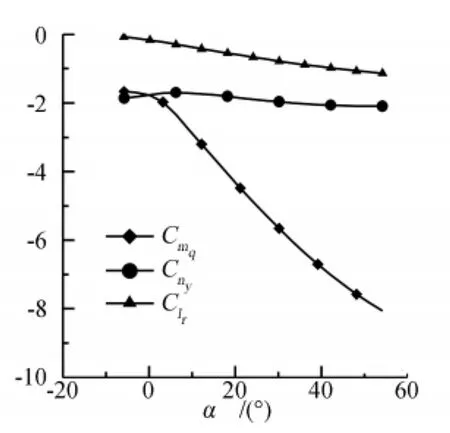
图7 动态稳定性导数Fig.7 Dyanmic stability
横侧向稳定性及操纵性是升力类飞行器必须重点考虑的问题,也是国外高超声速飞行器研究的重点。图6给出了马赫数7.0、质心系数0.66、水平及方向舵的舵偏角均为0°时的方向静稳定导数Cnβ及滚转静稳定导数Ctβ随攻角的变化规律,采用右手坐标系,并定义正侧滑角产生正侧向力,滚转力矩正方向指向弹体底部,偏航方向正力矩指向上。计算表明,在正攻角范围内,方向静稳定导数小于零,是偏航静不稳定的,而滚转静稳定导数在15°左右攻角(0°舵偏对应配平攻角)附近大于零,是滚转静不稳定的。当然,还需要进一步进行仔细的横侧向稳定性导数计算分析,包括惯性滚转耦合、操纵耦合、荷兰滚导数及旋转导数等。此外,图7给出了此类飞行器的三方向动导数,计算马赫数7.0、质心系数0.66、水平及方向舵的舵偏角均为0°。从俯仰阻尼导数、偏航阻尼导数和滚转阻尼导数的计算结果看,飞行器是三方向动态稳定的。
3 结论
本文研究了带控制舵升力体机动飞行器气动布局概念设计。研究表明,该方案具有较高的高超声速稳定配平升阻比,可以同时兼顾大攻角及中小攻角配平,舵面控制效率较高,而且稳定性及操纵效率满足要求,是高超声速飞行器实现高机动飞行的潜在可行方案。
[1]SPEARMAN M L.Aerodynamic characteristics of some lifting reentry concepts applicable to transatmospheric vehicle design studies[R].AIAA 84-2146,1984.
[2]VSPENCER B.Transonic aerodynamic characteristics ofa series of bodies having variations in fineness ratio and crosssectional ellipticity[R].NASA TND-2622,1965.
[3]唐伟,高晓成,李为吉,张鲁民.双椭圆截面再入飞行器的气动计算及布局优化设计[J].空气动力学学报,2004,22(2):171-174.
[4]唐伟,张勇,李为吉,马强.二次曲线截面弹身的气动设计及优化[J].宇航学报,2004,25(4):429-433.
[5]唐伟,张勇,马强,李为吉.控制舵椭圆截面飞行器的气动设计[J].空气动力学学报,2006,24(2):223-226.
[6]唐伟,桂业伟.通用大气飞行器的参数化气动布局研究[J]. 空气动力学学报,2009,27(3):325-328.
