舰艇自主导航设备特点比较及发展前景
2011-04-03陈建国
陈建国
(海军驻上海地区水声导航系统军事代表室 上海 201108)
舰艇自主导航设备特点比较及发展前景
陈建国
(海军驻上海地区水声导航系统军事代表室 上海 201108)
自主导航;特点比较;发展前景
自主导航设备是现代舰艇必不可少的装备,陀螺罗经、平台罗经、惯性导航系统均为自主导航设备。从设备原理、特点、应用等方面对它们进行了全面比较和阐述,并根据现代战争对自主导航设备的要求,论述了它们未来各自的发展前景和方向。
0 引言
在舰艇航行中,自主导航设备不依赖外部信息,引导舰船航行到目的区域,并为武器系统提供舰船位置、速度、姿态等信息。本文所要阐述和比较的自主导航设备包括陀螺罗经、平台罗经和惯性导航系统。陀螺罗经是舰艇为保证航海安全而必备的导航设备,它仅为舰船提供航向信息;平台罗经主要装备作战舰艇,既为舰船导航系统提供舰船航向信息,也为作战系统提供纵摇、横摇信息;惯性导航系统作用与平台罗经相似,但除提供姿态信息外,还能自主提供位置和速度信息。
1 设备原理及主要特点
陀螺罗经、平台罗经、惯性导航系统均属于自主导航设备,都是基于陀螺的定向性和进动性原理工作的,但它们在应用模型上却有较大区别。
陀螺罗经(以阿玛-勃朗系列罗经为例)由陀螺仪、电磁摆、碗形齿轮、修正回路和跟踪回路组成;若陀螺球偏离子午面,在地球自转水平分量的作用下,陀螺主轴将偏离水平面,于是随动球与陀螺球之间出现水平失调角,随动球水平信号器敏感此失调角后,产生失调信号,水平随动系统工作,使随动球转过一角度以跟踪主轴的运动。此时,固定在随动球上的电磁摆也跟着倾斜一角度,输出比例于倾斜角的摆信号,此信号经控制系统放大,输出到水平力矩器及方位力矩器。方位力矩器给陀螺施加方位控制力矩(找北力矩),水平力矩器施加水平阻尼力矩,从而使陀螺主轴进行阻尼振荡而稳定在当地子午面内。在结构上,随动陀螺在垂直方向和北水平上是受控的,在驱动电机和碗型齿轮的驱动下工作,而东水平仅仅靠重力(配重)保持基本水平,不受电气回路控制。其原理图见图1。
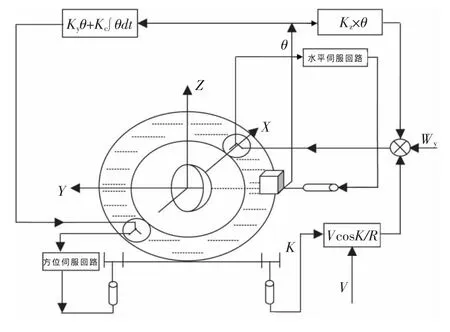
图1 电控陀螺罗经原理图
在图1中:
方位伺服回路传递系数:Ky(g·cm);
水平伺服回路传递系数:Kz(g·cm);
积分系数:Kc(g·cm);
电磁摆敏感角:θ(rad);
陀螺漂移:ωy(rad/s);
航行速度:V(m/s);
地球半径:R(m);
平台罗经一般包含陀螺仪和加速度计等敏感部件,它们相互正交安装在常平架上,陀螺仪敏感垂直、东水平和北水平三个方向的角速度,加速度计敏感北水平和东水平方向的加速度;电气部分包含修正回路和稳定回路。以国内主要二自由度陀螺仪平台罗经为例,如图2所示,台体可绕内环轴旋转,为方位轴;绕中环旋转,为纵摇轴;绕外环旋转,为横摇轴。在每根旋转轴上都安装有力矩电机和多极旋转变压器,在方位轴上,并设有座标转换器。北向陀螺(GN)和北向加速度计(AN)组成回路,实现指北和保持南北水平;东向陀螺(GE)和东向加速度计(AE)组成回路,实现东西水平;根据北陀螺、东陀螺的讯号器信号,通过稳定回路、力矩电机使平台在三轴方向跟踪陀螺,从而实现了台体的指北和保持水平。具体来说,和陀螺罗经指北原理相似,如果北陀螺的主轴偏离水平面,主轴就会抬头或低头使台体倾斜,修正回路工作,加速度计和加速度计控制回路组合起来,送出台体倾斜角度讯号,这个讯号经过电气回路放大产生一个电流送给北陀螺的方位力矩器,也送到水平力矩器,从而产生力矩使陀螺主轴向反方向进动,恢复指北,并实现北水平。东水平实现原理也是一样的。
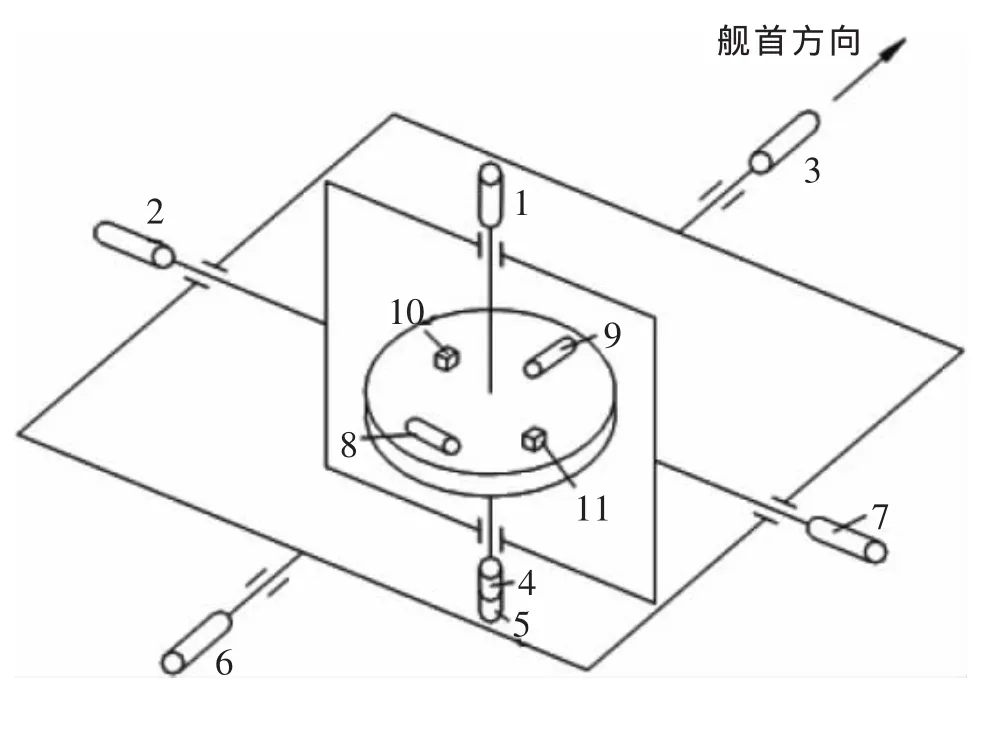
图2 平台罗经台体结构原理图
惯性导航系统分为平台惯性导航系统和捷联惯性导航系统。
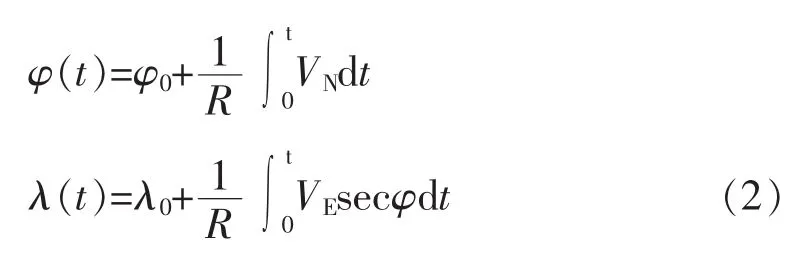
平台惯导系统物理结构上与平台罗经相同,初始对准模型与平台罗经相似,但在导航状态则有大的不同;它的陀螺稳定系统使三轴平台跟踪地理坐标系,保持台体上的加速度计保持水平,并分别稳定指东指北。加速度计测量载体对东、北方向的分量,高速计算机将它对时间进行积分,得到在导航坐标系中的速度、位置。要使平台跟踪地理坐标系,需使平台也以同样的角速度相对惯性空间旋转,并给陀螺施加控制电流,使三个陀螺分别产生的进动角速度(与平台罗经相同)见公式1:

在此基础上,在敏感到东向和北向载体加速度后,速度和位置的解算模型见公式2:
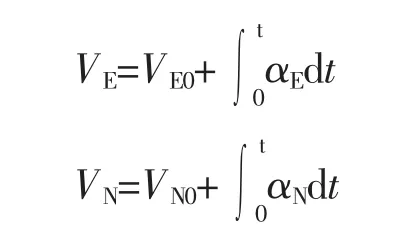
公式中:
Ωx、ωy、ωz:陀螺进动角速度(rad/s);
VE、VN:舰船东向、北向速度(m/s);
αE、αN:舰船东向、北向加速度(m/s2);
λ、φ:经纬度(°);
ωe:地球自转角速度(rad/s)。
捷联惯导系统(SINS)是在平台惯导系统基础上发展而来的,它是一种无框架系统。平台惯导系统和捷联惯导系统的主要区别是:前者有实体的物理平台,陀螺仪和加速度计置于稳定的平台上,与载体物理隔离,平台跟踪导航坐标系,以实现速度和位置解算,姿态信息直接取自于平台环架上的旋转变压器;后者的陀螺和加速度计直接固连在载体上作为测量基准,它不再采用机电平台,惯性平台的功能由高速计算机完成,即在计算机内建立一个数学平台取代物理平台,载体导航信息通过计算机计算得到,这是捷联惯导系统区别于平台惯导系统的根本点。图4为捷联惯导系统的基本原理框图。与传统的平台惯导系统相比,捷联惯导系统有如下优点:
(1)捷联惯导系统敏感元件便于安装、维修和更换;
(2)捷联惯导系统敏感元件易于重复布置,在惯性敏感元件级易于实现冗余技术,可提高性能和可靠性;
(3)捷联惯导系统无常平架平台,减小了系统体积。
近10年来,美国等发达国家舰艇用中等精度惯性导航系统已实现了由传统平台式向现代捷联式的更新换代。
2 设备性能特点比较
从第1章可以看出,陀螺罗经、平台罗经、惯导系统它们都是自主导航系统,应用原理基本相似,但不完全相同,功能和精度也是从简到难,从低到高。陀螺罗经是一般的普航设备,其结构和应用原理相对简单,航向精度也相对较低,广泛应用于民用船舶和军用舰艇。平台罗经的结构和数学模型较陀螺罗经复杂,其功能和精度上介于陀螺罗经和惯导系统之间,结构上与平台惯导系统相同,主要应用于军用舰艇,为舰艇各系统提供当前姿态,为导弹、火炮、雷达等设备提供稳定平台。惯导系统是随导弹武器系统和潜艇技术的发展而发展的,它除提供舰艇姿态信息外,还能自主提供速度和位置信息,满足了导弹超视距攻击和潜艇长时间潜航的需求;惯导系统结构上与平台罗经相似,但对敏感元件输出的处理方式却不相同:平台罗经的加速度信号主要用于敏感重力加速度,为系统提供水平信息,舰艇的加速度信息作为有害信息必须滤除;惯导系统的加速度信号敏感的重力信息和舰艇加速度信息都是有用信息,重力加速度用来辅助陀螺系统进行初始对准,而舰艇加速度信息用来进行两次积分运算,以求出载体速度和位置;因此,平台罗经和惯导系统主要用于军用,而惯导系统无论是功能上还是精度上都比平台罗经更胜一筹。这三种舰艇自主导航设备比较见表1。
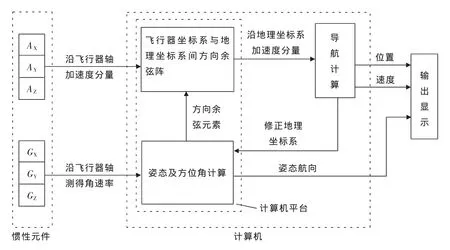
图4 捷联惯性导航系统基本原理框图
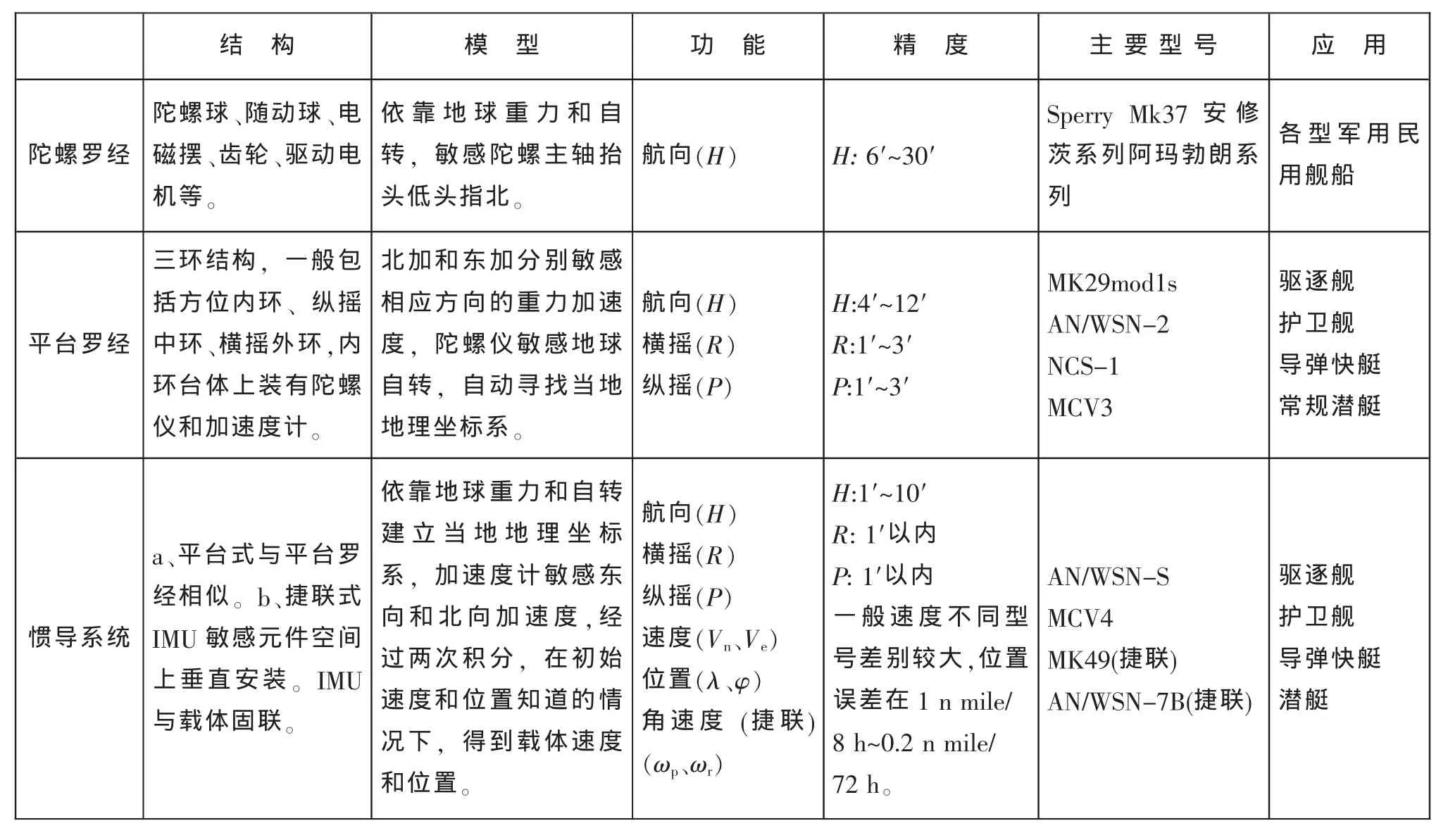
表1 舰艇自主导航设备综合比较
3 设备未来发展展望
随着现代战争对武器载体隐蔽性的要求越来越高,舰艇自主导航设备的需求量也越来越大;舰艇武器系统作战性能不断改善,对舰艇自主导航设备的要求也不断提高。固态陀螺(光纤陀螺、激光陀螺、微机械陀螺等)动态性能好、可靠性高、启动时间短的特点,决定了对传统自主导航技术带来极大的冲击。陀螺罗经作为舰艇普航设备,主要用于保障舰船的航行安全,因此,它的地位将不可动摇;但传统机械陀螺具有罗经启动时间较长、可靠性一般的弱点,必然会被固态陀螺航向姿态系统所取代。传统平台罗经的地位比较尴尬,它的弱点跟陀螺罗经相似,其提供的信息与固态陀螺航向姿态系统相同,其精度也并无多大优势,这些特点决定了它也必然会被固态陀螺航向姿态系统取代。惯性导航系统作为提供信息最全的自主导航设备,广泛应用于大中水面舰艇及潜艇,这些都是GPS、北斗、罗兰C等无法替代的;随着计算机技术的飞速发展以及大动态范围固态陀螺仪的日益成熟,传统中等精度惯导系统必然会被固态陀螺捷联惯性导航系统取代,尤其是激光陀螺捷联惯导系统。美国MK49型系列捷联惯性导航系统自上世纪90年代以来开始装备美国和北约各式潜艇和水面舰艇,环形激光陀螺捷联惯性导航系统AN/WSN-7B型则于21世纪开始大规模生产并装备美国海军舰艇,代表了惯性导航技术发展的最新水平。现在,国内激光、光纤陀螺技术已达到一定水平,捷联系统集成技术早已成熟,相信用不了多久,光纤陀螺航向姿态系统、激光陀螺捷联惯性导航系统将陆续装备我海军各型水面舰艇及潜艇,促成我海军自主导航装备发展的又一次飞跃。
[1]许江宁.陀螺原理[M].国防工业出版社,2005.
[2]黄德鸣等.平台罗经[M].国防工业出版社,1994.
[3]李滋刚等.捷联式惯性技术及系统[M].东南大学先进技术与装备研究院,2007.
Characteristic comparison and development prospects of the ship autonomous navigation equipment
Chen Jianguo
autonomous navigation;characteristic comparison;development prospects
The autonomous navigation equipments,such as gyrocompass,stabilized gyrocompass and the inertial navigation,are absolutely necessary in modern ships and submarines.This paper describes and compares them in principles,characteristics and applications,then discusses their development prospects based on the requirement in the modern warfare.
U666.1
A
1001-9855(2011)01-0044-04
2010-06-01
陈建国(1971.07-),男,汉族,工程师,主要从事导航设备研究建造。
