一种基于C674X的GPS接收机硬件方案研究
2011-03-26刘宏亮于纪言曹鹏张华强
刘宏亮,于纪言,曹鹏,张华强
(南京理工大学江苏南京210094)
为了提高火炮的射击精度和作战效能,满足适应未来战争要求,世界各国将高新技术应用于常规武器,研制出了各种精确制导炮弹。制导方式主要包括激光半主动制导、红外和毫米波制导、惯性制导及全球卫星导航系统制导。
激光制导受到天气以及烟雾等因素的影响较大,毫米波、红外等自寻的技术造价昂贵、维护困难。激光惯性导航装置测量动态范围宽、线性度好、性能稳定,但成本昂贵,高达几十万乃至上百万,体积较大,不适合低成本的炮弹。经试验表明微机械结构比硅结构承受高冲击力的能力差,即微机械会先于基于硅晶体的电子元件损坏。微机电(MEMS)惯性导航装置含有微机械部分,抗高过载能力差,而且误差随时间不断积累,不宜作为单独的制导系统。全球卫星导航系统制导方式具有精度高、体积小、抗高过载、全天候使用等特点,成为炮射制导兵器主要的制导途径之一。
GPS由空间卫星星座、地面监控系统和用户接受设备3部分组成。始于20世纪70年代,经过20余年的研究实验,耗资300亿元,到1994年组建完成。作为一种实时定位、测速、授时的导航系统,其在定位精度和观测时间上面的优势,使其成为该领域的首选。
1 硬件电路设计
现有的GPS接收机基本构成方框图如图1所示。
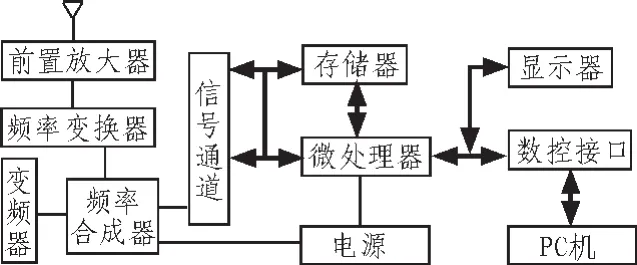
图1 接收机基本构成方框图Fig.1 Receiver block diagran of basic compon ents
本系统的信号接收机硬件主要包括4个功能单元:天线单元、射频单元、相关器单元、微控制器单元[1]。
基于现有架构,结合各功能模块的发展现状,设计出一款弹载GPS接收机,以期实现实时定位、测速和授时。
相关核心模块选型如下:
Zarlink公司生产的GP2015作为接收机的射频前端,实现对信号的下变频处理;GP2021芯片作为C/A码基带相关器,对中频数字信号进行解调和解扩,得到导航电文;TI公司的浮点型数字处理器TMS320C6747,对接收机自检、测定、搜捕卫星信号,进行相关计算[2]。
1.1 天线单元
天线单元主要由天线、滤波器和前置放大器组成,该单元电路图如图2所示。天线的作用是将卫星信号极微弱的电磁波能转化为相应的电流。滤波器用于抑制带外的干扰信号。而前置放大器则是将信号电流予以放大,有时还兼有变频作用。
本方案采用NovAtel GPS-511 L1波段右手螺旋极化有源天线,频带为1575±2 MHz;选用Murata公司中心频率1 575 MHz、带宽为2 MHz的SAFSElG57芯片作为有源天线和低噪声放大器之间的无源带通滤波器。该滤波器可有效滤除带外射频干扰,特别是1 224.58 MHz的镜像噪声干扰,避免引起射频前端第一级混频后信号的严重失真;为弥补各损耗电路引起的信号增益的损耗,选用英飞凌Infineon公司推出的一款GPS专用的超低噪声放大器BGA715L7。该芯片使用单端电源,电压为3.3 V,电源消耗仅仅为3.3 mA,具有低噪声、高增益、高输入等特性。
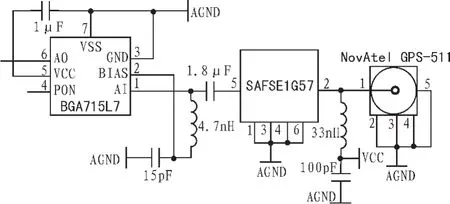
图2 天线单元电路Fig.2 Aerial unit circuit
1.2 射频单元
该单元电路核心芯片采用ZARLINK公司推出的GPS射频前端芯片GP2015。它具有低功耗、低成本和高可靠性等特性,采用TQFP封装,封装尺寸小,工作电源电压为3~5 V,当芯片工作在3 V电压下,其功耗为200 mW。
GPS Ll信号通过天线、预选频滤波器和低噪声放大器后输入到GP2015,GP2015将该射频信号与不同频率的本振信号经三级下变频到中频(IF),在GP2021提供的5.714 MHz的采样频率下,将中频信号变换成频率为1.405 MHz的2位TTL电平输出[3]。
所以,该单元的设计任务主要有两个:晶体振荡器设计和滤波电路设计。
GPS接收机定位精度、信号的准确性和稳定性,以及信号的一致性要求较高,从而对标准基准时钟稳定性提出了较高的要求。本系统采用高精度温补型晶体振荡器TCXO,该晶体振荡器与外部匹配电路共同工作,产生稳定的10.000 MHz的基准时钟信号,在25℃标准温度下,其调整频差为士1 ppm,负载电容为15 pF。在电源与GND之间串接10 uF和100 nF电容,以有效滤除电源杂波。晶体振荡匹配电路原理图[4]如图3所示。
GP2015的滤波电路设计分为三级:第一级,设计为二阶的切比雪夫滤波器,性能指标为中心频率175.42 MHz,带宽为2 MHz(如图4所示);第二级,滤波器采用Mitel公司的声表面滤波器DW9255,中心频率为35.4 MHz,带宽为2 MHz(如图5所示);第三级,属于GP2015片内滤波,它的作用是滤除进入A/D转换器的噪声和干扰信号。
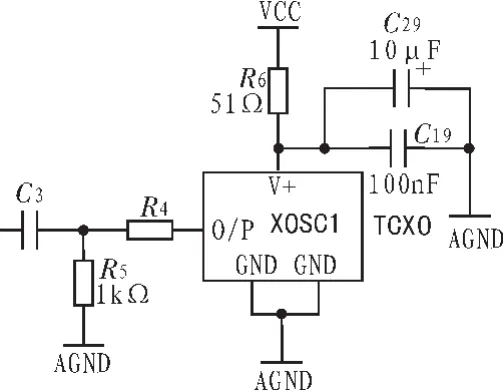
图3 晶体振荡匹配电路Fig.3 Matching circuit of the crystal oscillator
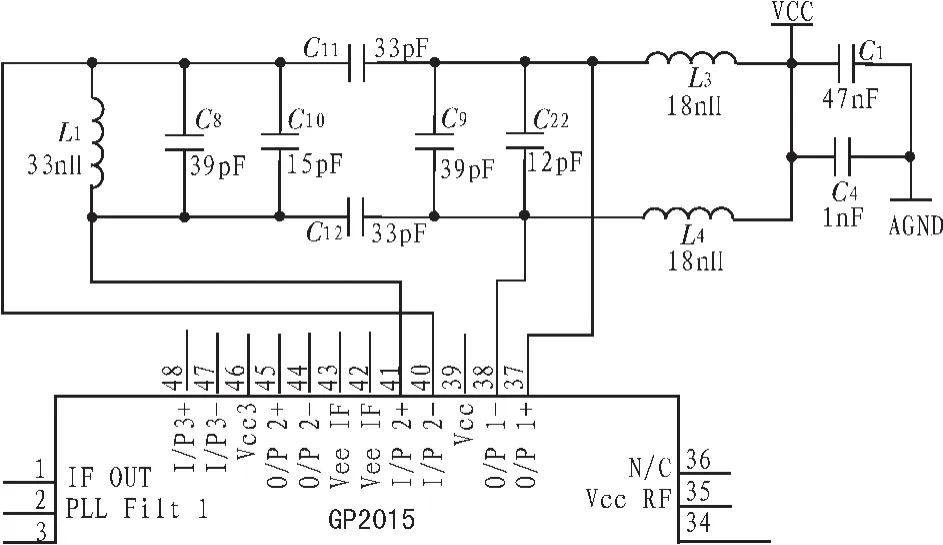
图4 第一级滤波电路Fig.4 The entry-level filter circuit
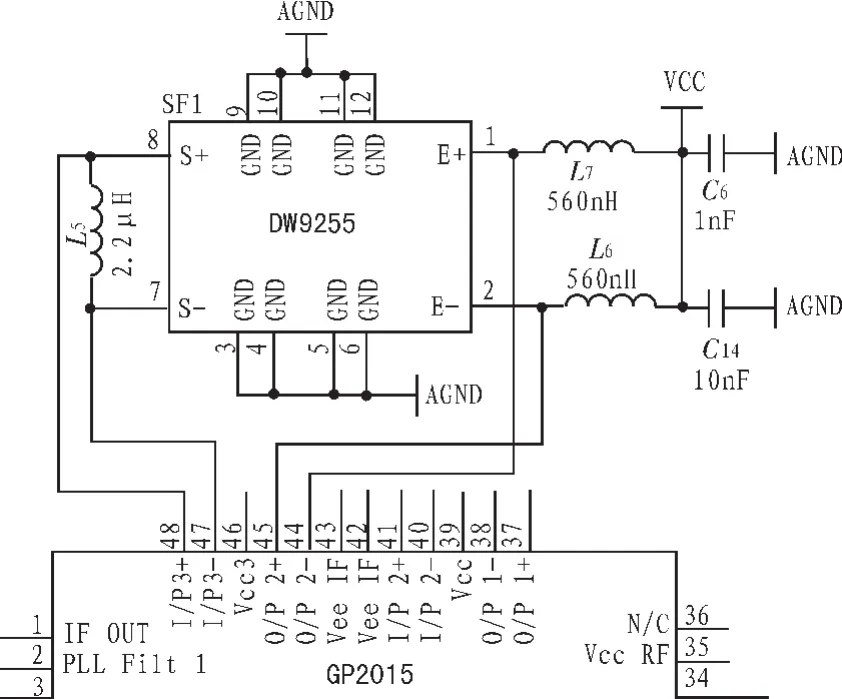
图5 第二级滤波电路Fig.5 The second-stage filter circuit
1.3 相关器单元
Zarlink Semiconductor公司的12通道C/A码基带相关器,可与GP2015以及大多数16位和32位的微处理器兼容,因此在GPS导航系统、GPS测量接收机和时间转发接收机中得到广泛应用。
GP2021有两种工作模式:"真输入"模式和"综合输入"模式。模式选择由SYSTEM_SETUP寄存器中的FRONT_END_MODE位控制,默认值为真输入模式(Real-Input mode)。
对于与GP2015的组合匹配电路,GP2021接收来自GP2015的40 MHz的差分时钟信号、MAGO、SIGO、PLLRDY和PRESET信号。将GP2015和GP2021的差分时钟引脚直接相连;MAGO、SIGO及CLK采用串联端接电阻,减少信号的反射。设计GP2015与GP2021接口电路原理图[5]如图6所示。
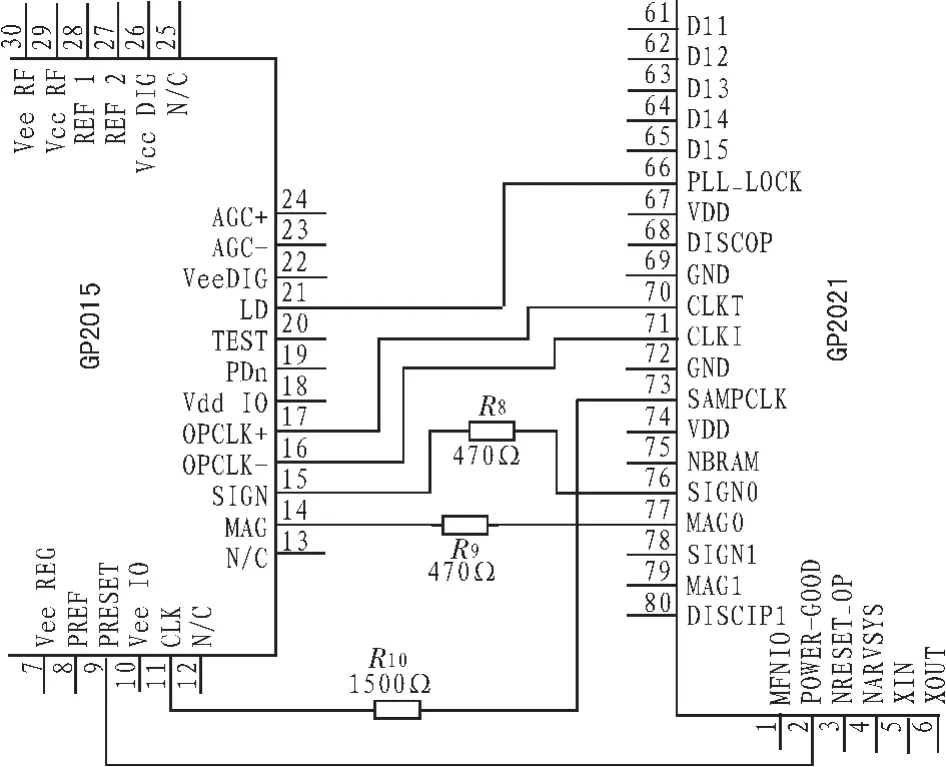
图6 GP2015与GP2021接口电路Fig.6 The connecting circuit of GP2015 and GP2021
1.4 微控制器单元
选用TMS320C6747对GP2021进行读操作和写操作,获取导航数据及控制GP2021的信号捕获和跟踪过程。
GP2021提供了多种标准接口方式与C6747进行通信,包括ARM6、Motorola、Intel486、Intel80186的接口,接口的配置取决于GP2021片上标号为NARMSYS,WRPROG及NINTELMOT的引脚高低电平的组合逻辑,如表1所示。
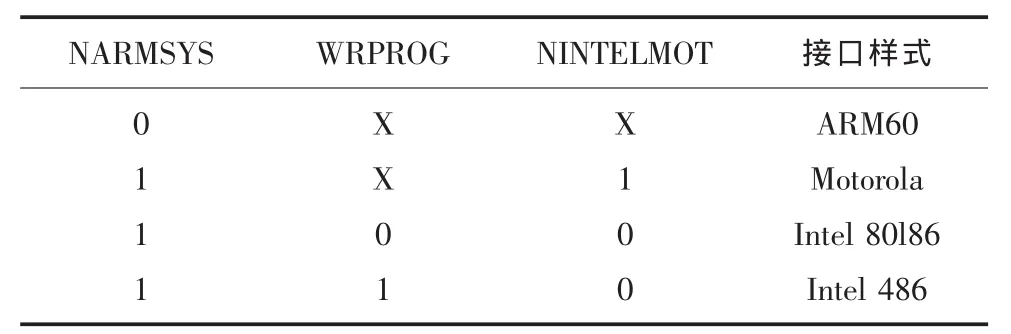
表1 GP2021接口配置Tab.1 The connecting installs of GP2021
本系统选用英特尔186模式来对GP2021进行写操作和读操作。为了进行这些操作,GP2021提供了4根控制线:片选信号NCS、写选通WREN、读选通READ、地址锁存使能信号ALE_IP;8根地址线A[2]-A[9];16根数据线D[0]-D[15]。
可以将GP2021等价为异步随机存储器,采用C6747的外部存储器接口EMIFA与GP2021进行匹配。C6747的EMIFA接口包含3根控制线,13根地址线,16根数据线。将EMIFA的片NCS相连,它的地址空间为0x62000000-0x63FFFFFF。EMIFA中其他的引脚就按功能进行相连。由于GP2021与C6747的地址总线、数据总线和控制总线的引脚都支持LVTTL,所以无需电平转换就可直接相连,不会出现逻辑错误。通过设置C6747中EMIFA接口片选信号READ_SETUP、READ_STROBE、READ_HOLD、WRITE_SETUP、WRITE_STROBE、TA、WRITE_HOLD的时间就可以实现与GP2021数据传输[6]。
另外GP2021中ACCUM_INT引脚输出一个间隔505.05 us的信号,保证GP2021与C6747之间的接口正常传输。C6747内增强型的TIMER定时器具有通过TIMER外部时钟输入引脚捕获外部输入事件的功能。由此将TIMER的时钟输入引脚直接与ACCUM_INT相连。所以C6747与GP2021接口电路如图7所示。
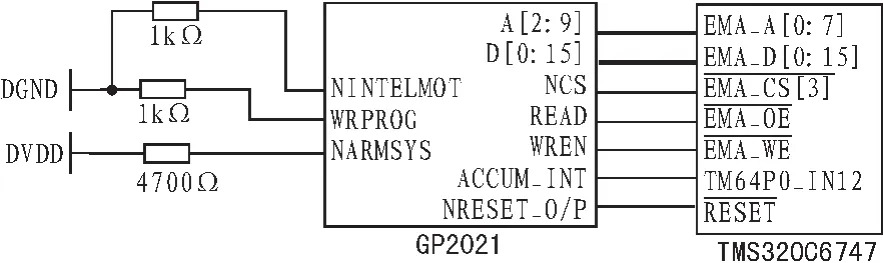
图7 C6747与GP2021接口电路Fig.7 The connecting circuit of C6747 and GP2021
C6747内部L2 RAM(256 kB)加上共享的RAM(128 kB)共为384 kB,满足了接收机对RAM的需求,无需进行外部扩展SDRAM。因此本系统只需扩展外部Flash存储器。
C6747具有两个外部存储器接口:EMIFA和EMIFB。EMIFB只能与SDRAM连接。EMIFA包含5个片选信号,EMA_CS[0]只对SDRAM有效,EMA_CS[2:5]对Flash有效。EMIFA可以连接8位或者16位数据宽度的Flash,包括了XOR和NAND类型。本系统选用SST公司的XOR型FLASH SST39LF800A作为程序和数据存储器。
选择完Flash型号之后,接着就要设计程序加载模式和总线接口。加载方式由系统重新启动时刻BOOT引脚高低电平决定。本文采用XOR Flash加载和仿真调试加载,两种方式进行切换使用便于调试软件。针对XOR Flash的程序加载模式,C6747芯片要求Flash片选信号必须是EMA_CS[2],它的地址空间是0x60000000-0x61FFFFFF。
SST39LF800A的寻址空间是512 k,需要19根地址线,但是C6747没有那么多的地址线,需要进行地址线扩展。一般进行地址线扩展有两种方法:一种是利用高速的译码器扩展;另一种是利用普通I/O作为地址线。弹载接收机的空间是受限的,增加一个器件会占用更多的空间。在小的PCB面积里,需要布置很多元件,多放置一个元件可能会使布线更加复杂、信号之间的干扰更加严重。第二种方法更加适合弹载接收机。在C6747的封装里,普通I/O引脚GP4[0:5]焊盘与地址线引脚焊盘距离更近。如果选用这些普通I/O口来作为地址线,在PCB板上的地址走线长度之间相差不多,避免产生很大的延迟使系统不能正常访问Flash,所以采用GP[0:5]的引脚来作为扩展的地址线。C6747与FLASH的接口电路如图8所示。
2 软件模块设计
GPS卫星导航定位系统属于被动定位系统。接收机本身不发射任何辐射信号,仅被动接收卫星的导航定位信号即可完成自身定位功能,因此具有功耗低、体积小、重量轻、成本低、隐蔽安全等优点。
结合所设计的硬件平台的特点和功能,软件系统由以下几个主要模块构成:
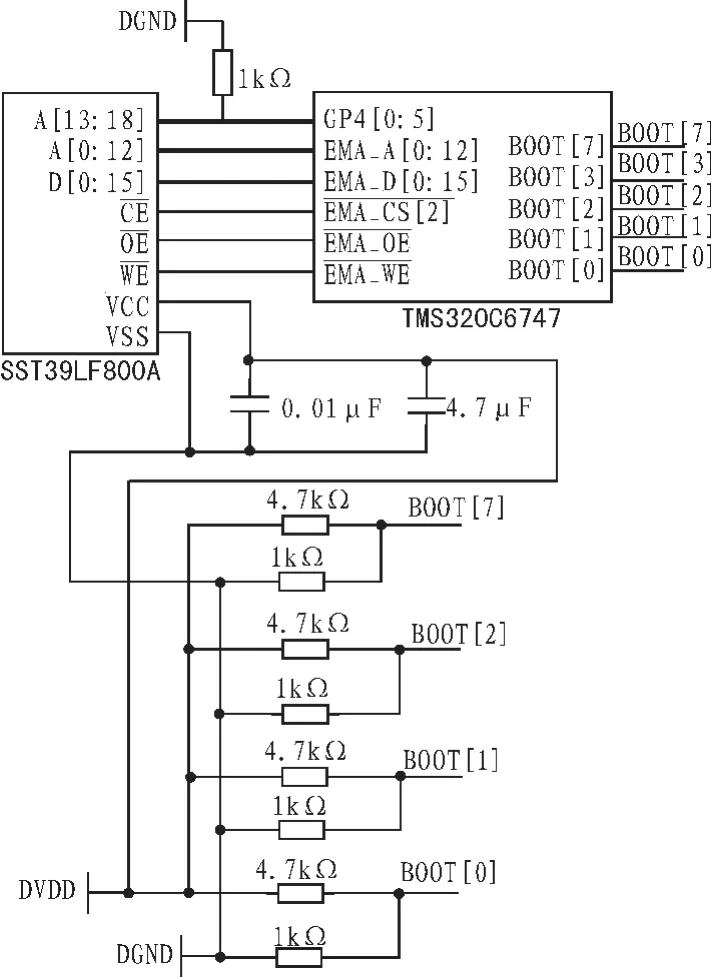
图8 C6747与FLASH的接口电路Fig.8 The connecting circuit of C6747 and the Flash
1)量测数据获取模块采样、量化后的GPS导航信号在GP2021多通道相关器中完成解调、解扩后,进行相关积分处理。根据GP2021技术资料说明,积分时间长度为C/A周期(1 ms)。由于每个通道C/A初始位置不同,因此积分完成时间也有所不同。当每一通道积分完成后,利用寄存器分别对同相臂(Ⅰ臂)迟早码、正交臂(Q臂)迟早码积分结果进行锁存,以便DSP读取处理,锁存器采用循环覆盖方式锁存积分数据,因此,每个通道锁存数据必须在下个积分完成周期之前读出,否则数据将被覆盖。
由于每个通道的积分起始时间不同,积分完成时刻也不一致。若对每个通道积分结束时刻分别处理,由于通道较多(24通道),则在1 ms时间内要频繁进行24次中断响应,不但系统执行效率低下,同时将严重占用系统资源,对后续的卫星轨道计算、导航电文译码、定位解算等极为不利。笔者采用集中式读取办法解决该矛盾,在1 ms之内保证至少对所有24通道数据集中读取一次。根据每个寄存器的锁存状态确定是否积分结束,具体确定哪些通道数据参与环路控制,从而在一次中断响应同时处理多通道数据,有效地提高了软件的执行效率。GP2021提供了505.05 μs和854.70 μs两种中断时钟。该系统采用的是505.05 μs,利用TMS320C6747的INT4对该中断源响应。软件流程框图如图9。
2)环路处理模块本系统硬、软件设计中,根据读取的IDith、Iprop、QDith、DProp量测值,由软件实现鉴相/鉴频、环路滤波等环路处理,并形成环路NCO频率控制字回送给GP2021,控制本地载波生成频率/本地C/A码生成频率,从而实现环路的闭合。该模块包括信号搜索、捕获、跟踪等环路处理控制功能。该模块的程序流程图如图10所示。
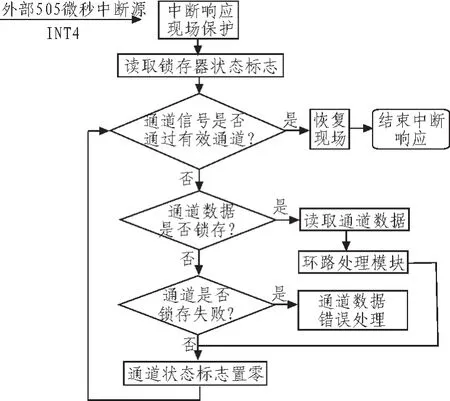
图9 测量数据获取流程框图Fig.9 Frame chart of measuring data
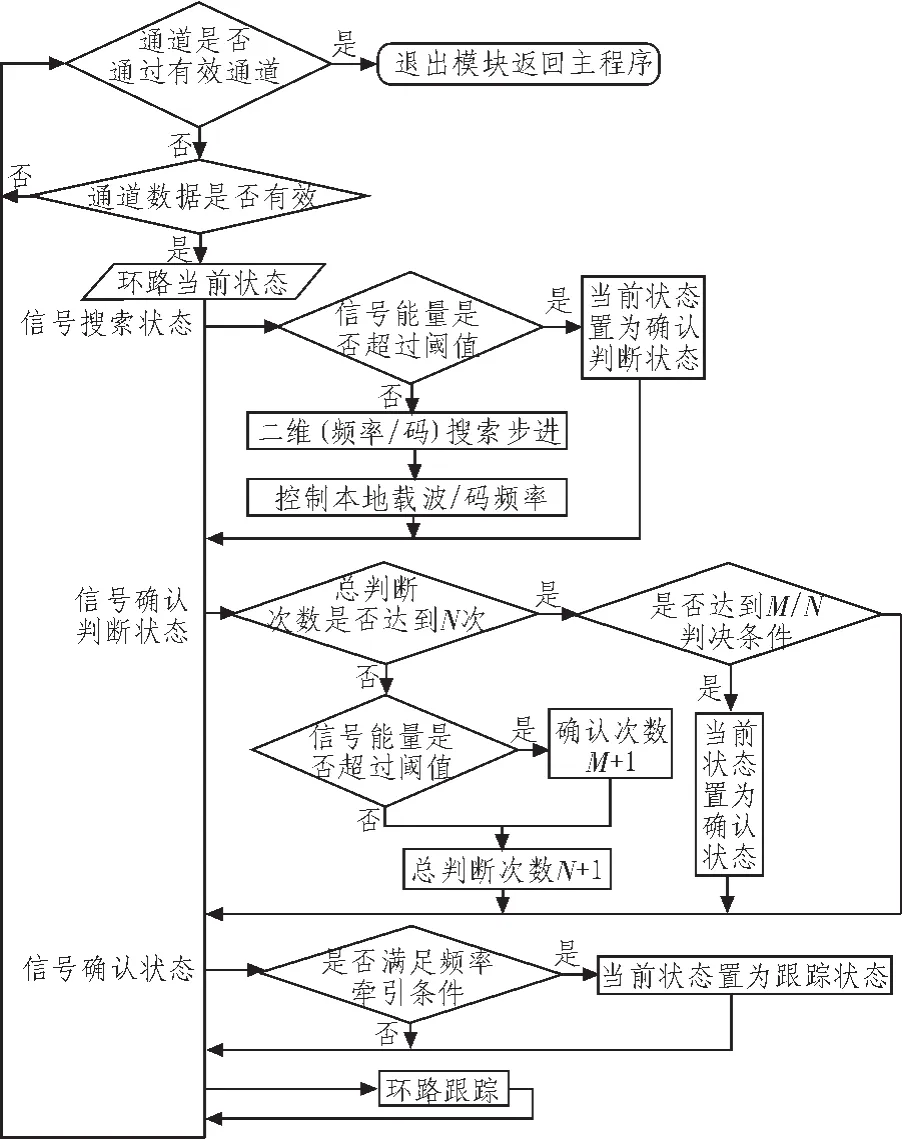
图10 GPS信号捕获流程图Fig.10 Frame chart of the GPS signal obtain
3 导航电文译码测试
在完成GPS接收机硬件设计和卫星信号快速捕获算法的基础上,即可对导航电文进行译码测试。
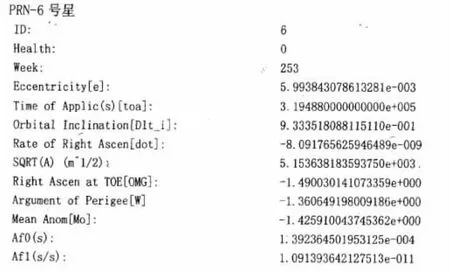
每颗卫星周而复始的发送星座中所有卫星的历书,从而使得在成功捕获锁定一颗星的情况下,也可接收所有卫星的星历。历书信息包含在导航电文的第4、5子帧中,32颗卫星的历书共计50页,每个子帧包含25页,因此50页历书数据共需25帧导航电文传送完毕。每帧导航电文传输时间为30秒,25帧共需750秒。故接收完整32颗卫星历书大约需要12.5分钟。接收并译码后的卫星历书举例如下:
4 结束论
在熟悉GPS原理的基础上,围绕射频前端电路、数字通道相关器和浮点型数字信号处理器3大模块搭建了完善的GPS接收机硬件平台,为相关软件和算法研制奠定了硬件基础。在完成硬件平台设计、加工调试的基础上,开展了GPS定位算法设计和软件流程实现等工作。最后,结合自主研发的GPS接收机硬件和软件,进行了导航电文译码测试,得到了理想的星座轨道历书,成功地实现了对GPS卫星的捕获和跟踪。其设计也是后续计算卫星的空间位置和运行速度,以及实时定位导航必须完成的重要一步。
[1]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:237-238.
[2]黄智伟.GPS接收机电路设计[M].北京:国防工业出版社,2005:107-109.
[3]周海燕,李天松.基于GP2015射频前端电路的GPS接收机设计[J].大众科技,2007(100):28-31.
ZHOU Hai-yan,LI Tian-song.The GPS receiver designs taking GP2015 as the rf circuit[J].Mass Technology,2007(100):28-31.
[4]高洪民,费元春.GPS接收机射频前端电路原理与设计[J].通讯与电视,2005(2):55-57.
GAO Hong-ming,FEI Yuan-chun.GPS receiver rf circuit principle and design[J].Communication and Television,2005(2):55-57.
[5]赵梦,张颖光.GPS接收机12通道相关器GP2021的原理与应用[J].国外电子元器件,2005(5):31-33.
ZHAO Meng,ZHANG Ying-guang.The principle and application of the 12 channels correlator GP2021[J].Foreign Electronic Components,2005(5):31-33.
[6]赵大鹏.基于C/A码快速捕获技术的GPS接收机设计[D].南京:南京理工大学,2009.