用吊耳法养殖虾夷扇贝时左壳定向方法的研究
2011-03-20林艾光马先英丁晓非谢忠东
林艾光,马先英,丁晓非,谢忠东
(大连海洋大学辽宁省渔业装备工程技术研究中心,辽宁大连116023)
用吊耳法养殖虾夷扇贝时左壳定向方法的研究
林艾光,马先英,丁晓非,谢忠东
(大连海洋大学辽宁省渔业装备工程技术研究中心,辽宁大连116023)
为了实现吊耳法养殖虾夷扇贝Patinopecten yessoensis的钻孔作业自动化,对扇贝左壳定向方法进行了研究。提出了利用扇贝左右壳曲率不同的形状特征,通过控制扇贝的入水速度和角度,在水中实现左壳定向的方法。结果表明:扇贝在水中运动时,左右两壳所受的压力不同,扇贝在流体压力差和重力的作用下实现左壳朝上。在入水速度为1.0~1.5 m/s、入水角度为-30°~60°、水槽直径为60 cm、槽深为26 cm以上的条件下,将扇贝投入静水中,可实现左壳朝上定向;扇贝在水中完成定向所需时间为0.42~0.45 s。该法既可避免机械振动和碰撞对扇贝的损伤,又能减少因加工过程中扇贝在空气中暴露对其生长的影响。
虾夷扇贝;吊耳养殖;左壳;定向
虾夷扇贝Patinopecten yessoensis的养殖方法主要有浮筏养殖(吊耳养殖、衣袋网养殖和灯笼网笼养殖)和底播增殖[1-4]。采用吊耳法养殖虾夷扇贝,一方面可方便扇贝摄饵,其生长速度比网笼养殖要快;另一方面可节省网具等养殖资材,也不用倒笼,既减轻了渔民的劳动强度,还可避免底播时天敌的侵害,且收获方便[5-8]。采用吊耳法养殖扇贝时,需在扇贝足丝窝对应的左壳前耳处钻一个穿绳用的小孔,因钻孔作业费工[4],故该法尚未在中国普及。日本现已开发了扇贝自动钻孔机,但物料的供给仍需人工手动进行[6],繁杂的定向动作,单调的连续作业会使人很快疲劳,跟不上机器的速度。因此,急需开发一种扇贝自动定向机构。
虾夷扇贝的左壳外表面为茶褐色,右壳外表面为黄白色[9-10]。五香秀治[11]提出利用两壳的颜色特征,用光电传感器识别,再控制机械装置使其翻转成同样的姿势。但扇贝在生长过程中,贝壳外表面常附着藤壶、牡蛎、海藻等生物,还有的贝壳颜色异常,影响了光电传感器识别的准确性。另外,扇贝在翻转过程中易与机械装置碰撞,造成贝壳边缘碎裂,使外套膜裸露在壳外,容易导致扇贝发病、死亡[12-13]。本试验中,作者利用扇贝左右壳曲率不同的形状特征,对扇贝在水中实现左壳定向的方法进行了研究,旨在为实现扇贝钻孔作业自动化提供参考资料。
1 材料与方法
1.1 材料
供试贝选择没有附着物和附着有藤壶的扇贝,平均壳长为70 mm,壳厚为15 mm,质量为32 g。试验用海水的密度为1.023 g/cm3,温度为15℃。
实验装置如图1所示。在长方形水槽中充入海水,水槽长为80 cm,宽为40 cm,高为40 cm,水深为35 cm。在水槽上方设置导向板,导向板与水面垂线的夹角(以下简称入水角)可通过调节台上的夹子调节。为了解扇贝在水中下落时的运动轨迹,在水槽正面的中央放置摄像机,在水槽后面画上间距5 cm的方格线作为测量基准。
1.2 方法
1.2.1 入水速度和入水角度对左壳朝上率的影响试验 将没有附着物的扇贝以不同的入水速度和角度沿导向板滑入水中,观察记录扇贝着底后左壳的朝上率。首先将扇贝从不同高度滑入水中,使其入水速度分别为0、0.5、1.0、1.5、2.0、2.5、3.0 m/s,观察入水速度对左壳朝上率的影响(入水角度为0°)。
将导向板的角度由-60°到60°,每隔15°变化一次,观察入水速度为0.5、1.0、1.5 m/s时不同入水角度对左壳朝上率的影响。

图1 实验装置Fig.1 The experimental device
1.2.2 左壳朝上运动所需距离与时间的试验 让没有附着物的扇贝在入水角度为0°,入水速度分别为0.5、1.0、1.5、2.0、2.5、3.0 m/s的条件下滑入水中,用摄像机将扇贝在水中的运动情况记录下来。用图像解析装置PIAS3将每一祯的运动情况数据化,测算扇贝在水中完成左壳朝上运动所需的运动距离和时间。
1.2.3 附着物与活性度对左壳朝上率的影响试验将附着有藤壶和张口的扇贝在入水角度为0°,入水速度也为0 m/s的状态下投入水中,观察附着物和开口与否对左壳朝上率的影响。
2 结果与分析
2.1 左壳朝上运动与入水速度及入水角度的关系
2.1.1 入水速度对左壳朝上率的影响 图2是入水角度为0°时,左壳朝上率与入水速度的关系。由图2可见,入水速度为1.5 m/s以下时,左壳朝上率达到100%;入水速度大于1.5 m/s时,左壳朝上率下降,且速度越快,左壳朝上率越低。观察发现,当扇贝入水速度过快时,由于惯性作用使左壳已经朝上的扇贝继续旋转变为右壳朝上。因此,扇贝的入水速度应控制在1.5 m/s以下。
2.1.2 入水角度对左壳朝上率的影响 图3是在不同速度下,左壳朝上率与入水角度的关系。由图3可见:入水角度为正(左壳朝上供给)、入水速度控制在1.5 m/s以下时,扇贝左壳朝上率均能达到100%。入水角度为负(左壳朝下供给)、入水速度控制在0.5 m/s时,入水角度越小,左壳朝上率越低。入水速度为1.0~1.5 m/s、入水角度为-30°~0°时,左壳朝上率达到100%;入水角度为-30°以下时,左壳朝上率明显下降。

图2 左壳朝上率与入水速度的关系Fig.2 Relationship between percentage of left shell upward and entering when the test scallops are put into water
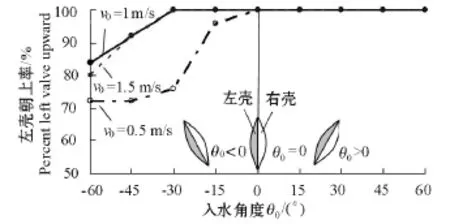
图3 左壳朝上率与入水角度的关系Fig.3 Relationship between percentage of left shell upward and angle of the scallops entering into water
2.2 左壳朝上的运动原理
虾夷扇贝的外形如图4所示。虾夷扇贝的壳长L和壳高H近似相等,从垂直于壳长和壳高组成的平面看类似圆形[9-10]。左右两壳的曲率不同,左壳曲率小,右壳曲率大。

图4 虾夷扇贝的外貌Fig.4 Schematic diagram of the scallop
扇贝入水后的受力情况如图5所示。扇贝入水后受到流体作用力和重力的作用。由于左右两壳的曲率不同,扇贝在水中运动时,两壳侧面的水流速
度也不同。假设扇贝不动,周围的流体运动,则扇贝周围的流体流动情况如图6所示。

图5 扇贝在水中运动时所受的力Fig.5 Forces applied to the scallop which moves in water

图6 扇贝周围流体流动示意图Fig.6 Schematic diagram of fluid flow around the scallop
根据连续流原理[14]:

因为扇贝占据一定的空间,使通流面积A2、A′2变小,流速v2、v′2变大,即

又因为左壳曲率比右壳曲率小,所以,左壳侧面流体流速比右壳侧面的流速小,即

根据能量守恒定律[14]:

因为流体的位能、压能和动能总能量守恒,左壳上侧流速v2小,压强p2大;右壳下侧流速v′2大,压强p′2小,即

因此,作用在左右两壳表面的总压力不平衡,产生了指向右壳的压力FL:

将扇贝边缘在前进方向的最前端作为支点,扇贝受到的总转矩为流体作用在扇贝上的转矩和重力作用在扇贝上的转矩之和,即

其中:MT为扇贝受到的总转矩(N·m);MF为流体作用在扇贝上的转矩(N·m);MG为重力作用在扇贝上的转矩(N·m)。
扇贝在水中运动时受到来自流体的转矩MF表示为

其中:ρ为流体的密度(g/cm3);v为扇贝在水中的运动速度(m/s);L为扇贝的壳长(mm);W为扇贝的壳厚(mm);WR为扇贝右壳的厚度(mm);WL为扇贝左壳的厚度(mm)。重力作用在扇贝上的扭矩MG表示为

其中:m为扇贝的质量(g);g为重力加速度(m/s2);θ为左右壳啮合线与重力方向的夹角(°)。
将式(8)和式(9)代入式(7),扇贝受到的总扭矩为
由式(10)可见:扇贝在水中运动时所受的扭矩MT与扇贝运动速度v、左右壳啮合线与重力方向的夹角θ及左右两壳的厚度差(WR-WL)有关。速度v越大,角度θ越大,两壳的厚度差也越大,扇贝所受的扭矩MT也就越大。
将供试贝的参数(壳长L=70 mm,壳厚W= 15.2 mm,左壳厚WL=7.1 mm,右壳厚WR=8.1 mm,质量m=32 g)代入式(10),计算得到扇贝入水时所受的扭矩MT与入水速度v0及入水角度θ0的关系如图7所示。从图7可见:入水速度v0= 0.5 m/s,入水角度θ0=-60°~-15°时,扇贝受到负的扭矩作用,左壳朝下回转后着底;入水速度v0=1.0~1.5 m/s,入水角度θ0=-30°~60°时,扇
贝受到正的扭矩作用,左壳朝上回转后着底。
实际上扇贝入水后受到水的阻力,运动速度v会比入水速度v0小;而运动方向改变后,左右壳啮合线与重力方向的夹角θ和入水角度θ0不同,使重力作用在扇贝上的扭矩变小。但是,入水速度越快,扇贝所受正的扭矩越大,使左壳朝上运动的趋势是一样的。

图7 总扭矩与入水速度、入水角度的关系Fig.7 Relationship between theoretic resultant moment (MT)and angle(θ0)and velocity(v0)of the scallop entering water
由以上分析可知,在入水速度v0=1.0~1.5 m/s,入水角度θ0=-30°~60°的条件下,将扇贝投入静水中,扇贝左壳朝上着底,实现左壳定向是可能的。
2.3 左壳朝上运动所需的距离与时间
图8 是扇贝在不同入水速度下左壳朝上运动所需要的距离。从图8可见:入水速度越大,扇贝完成左壳朝上运动所需的距离越小。当扇贝的入水速度为0.5 m/s时,扇贝在水中水平方向的运动距离为24.5 cm,垂直方向的运动距离为27 cm;入水速度为1.0 m/s时,扇贝在水中水平方向的运动距离为28 cm,垂直方向的运动距离为26 cm;入水速度为1.5 m/s时,扇贝在水中水平方向的运动距离为30 cm,垂直方向的距离为22 cm;入水速度为3 m/s时,扇贝在水中水平方向的运动距离为12 cm,垂直方向的运动距离仅为8 cm。为了避免扇贝在水下运动时与水槽的侧壁发生冲撞,扇贝定向用水槽的直径必须在60 cm,槽深在26 cm以上。

图8 扇贝左壳朝上运动所需的距离Fig.8 Moving distance required during scallop turning left shell upward in water
图9 为左壳朝上运动所需时间与入水速度的关系。从图9可见,入水速度越大,扇贝在水中完成左壳朝上运动所需的时间越短。入水速度为0.5 m/s时,所需时间为0.54 s;入水速度为3 m/s时,时间仅为0.09 s。

图9 左壳朝上所需时间与入水速度的关系Fig.9 Relationship between time(t)required for turning left shell upward and velocity(v0)of the scallop entering water
由式(10)可知,流体作用在扇贝上的扭矩与入水速度的平方成正比,入水速度越快,流体作用在扇贝上的扭矩越大,扇贝回转速度越快,完成左壳朝上动作所需的距离和时间也就越短。
自动钻孔机的生产率为60~100个/min,即需要每隔0.6~1 s供给一个扇贝。本方法在0.42~0.45 s(入水速度为1.0~1.5 m/s)内完成定向,能够满足要求。
2.4 附着物与活性度对左壳朝上率的影响
将贝壳表面附着有藤壶的扇贝在入水角度为0°,入水速度也为0 m/s的状态下投入静水中,左壳朝上率比没有附着物的低。藤壶附着面积约为35 mm2,高度约为3 mm时,扇贝左壳的朝上率为97%;附着面积约为80 mm2,高度约为5 mm时,扇贝左壳朝上率降为84%。扇贝左壳附着异物后重心位置有变化,流体阻力增加,影响了左壳朝上运动的准确性。实际生产中,应先将扇贝表面的附着物除掉。另外,受到触动后活性好的扇贝左右两
壳立即闭合,活性差的两壳张开不变。两壳开口在5 mm以上时,左壳朝上率只有57%,所以,扇贝要在活性好的情况下进行处理。
3 结论
本研究中,对实现吊耳法养殖虾夷扇贝的钻孔作业自动化必需的左壳定向方法进行了研究。提出利用扇贝左右壳曲率不同的形状特征,通过控制入水速度和角度,使扇贝在静水中左壳朝上运动后着底,实现左壳定向。另外,从理论上分析了扇贝在水中左壳朝上运动的原理,并通过实验对定向条件——入水速度和角度及完成左壳朝上运动所需运动距离和时间进行了讨论,为定向装置的设计提供依据。
1)扇贝在水中运动时,左右两壳所受压力不同,扇贝在流体压力差和重力的作用下实现左壳朝上。
2)在入水速度为1.0~1.5 m/s、入水角度为-30~60°、水槽的直径为60 cm、槽深为26 cm以上的条件下,可实现扇贝左壳朝上定向,完成定向所需时间为0.42~0.45 s。因为该定向方法是在水中完成的,避免了机械定向中振动、碰撞对扇贝的损伤,并减小了因加工过程中扇贝在空气中暴露对其生长的影响。
[1] 贺先钦,薛真福,王有君,等.虾夷扇贝地播增殖的试验[J].水产科学,1997,26(2):8-12.
[2] 柳中传,宋宗贤.虾夷扇贝养殖技术[J].海洋科学,1991(4): 11-14.
[3] 大连海洋高新技术企业孵化中心.虾夷扇贝穿耳养殖技术项目建设[EB/OL].[2006-07-31][2010-12-01].http://www. changhai-info.net.cn/kejichengguo_read.asp
[4] 虾夷扇贝养殖技术实用大全[EB/OL].[2010-03-08][2010-12-01].http://yz.ag365.com/yangzhi/shuichan/shuichanyangzhi/2010/2010030876968.html.
[5] 境一郎.日本におけるはたて貝増養殖[M].札幌:水産北海道協会,1976.
[6] 北海道水産新聞社.新版ホタテガイ取扱の手引き[M].札幌:北海水産新聞社,1992.
[7] 大连水产学院.贝类养殖学[M].北京:农业出版社,1980.
[8] 王如才,王昭萍,张建中.海水贝类养殖学[M].青岛:青岛海洋大学出版社,1993.
[9] 吉良哲明.原色日本貝類図鑑[M].大阪:保育社,1959.
[10] 波部忠重,小菅貞男.標準原色図鑑全集[M].3版.大阪:保育社,1967:132.
[11] 五香秀治.二枚貝連続供給装置:日本,平4-53431[P]. 1992.
[12] 見上隆克.ホタテ貝の増養殖と利用―増養殖の体系化にむけて5.機械化技術の考え方.水産シリーズ31[M].東京:恒星社厚生閣,1980.
[13] 森勝義,菅原義雄,小畑一臣.三陸沿岸における養殖ホタテ貝の大量へい死に関する研究:Ⅰ.貧栄養+振動の両実験下で発生するへい死について[J].魚病研究,1974(9):10-18.
[14] 刘惠枝.工程流体力学[M].大连:大连海事大学出版社, 1995.
A left shell orientation method in scallop suspending culture via a hinge
LIN Ai-guang,MA Xian-ying,DING Xiao-fei,XIE Zhong-dong
(Research Center of Fisheries Equipment and Engineering of Liaoning Province,Dalian Ocean University,Dalian 116023,China)
Yesso scallop(Patinopecten yessoensis)suspending culture drilling of a hole in the hinge on the left shell,and the scallops are often damaged,even death due to the vibration.A novel method to ensure the left shell orientation in water was studied by the different radius of left-right shell curvature and by regulation of the speed and angle of scallop entering water for automatic in-line positioning and posturing of the scallop shell.The results showed that the pressure on the left and right shells was found different when the scallop moved in the water.The left shell moved up under the different levels of fluid pressure and the role of gravity,that is,showed up-oriented at water current varying from 1.0 to 1.5 m/s,in a 60 cm diameter and 26 cm depth tank within 0.42 s to 0.45 s when the scallop was put into the water at a angle from-30°to 60°.This method is characterized by undamaged scallops caused by vibration and impact,and less the influence on growth of the scallop exposed to the air.
scallop;culture via a hinge method;left shell;orientation
S951
A
2095-1388(2011)05-0381-05
2010-12-18
辽宁省海洋与渔业厅资助项目(200806)
林艾光(1959-),女,博士,副教授。E-mail:linagcn@yahoo.com.cn