LMS自适应波束形成方法研究
2011-03-20王桂宝林中朝王兰美蒋小杰
王桂宝,林中朝,王兰美,蒋小杰
(1.西安电子科技大学电子工程学院,陕西西安710071;2.西安电子科技大学理学院,陕西西安710071)
最小均方误差(LMS)算法的基本原理是基于最陡梯度下降法,即沿着权值的梯度估值的负方向进行搜索,达到权值最优,实现均方误差最小意义下的自适应波束形成[1-4]。由于输入端不可避免地存在干扰噪声,自适应波束形成算法将产生参数的失调。为提高波束形成的稳健性文献[1~2]分别提出了带有双约束的和类似于对角加载的稳健波束形成方法,文献[4]提出了一种改进的非线性随机梯度LMS算法。收敛速度、稳态误差和失调量这3个相对的常规参数则是衡量自适应滤波算法优劣的重要指标。
1 LMS算法的原理
最陡梯度下降法是多种自适应算法的基础,其算法结构如图1所示。
LMS算法具有计算量小、易于实现等优点,因而广泛应用于实践中。图1为输入信号,ei=xi-di为误差。LMS算法的递推公式

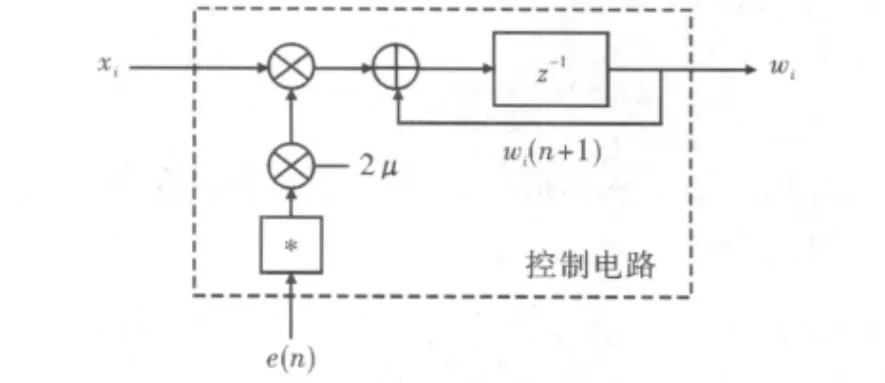
图1 LMS算法迭代电路
2 LMS算法的改进
收敛速度、稳态误差和失调量上的改进成为LMS算法改进的3个主要方向。在对收敛速度方面的研究中,重点集中在对LMS算法迭代公式w(n+1)=w(n)+2μe*(n)x(n)中步长因子μ的改进上。
对失调量方面的研究,重点集中在对0<μ<1/λmaxLMS算法失调系数的研究上,通过确立失调量与步长μ的约束关系来建立方程,然后以设定失调量的方式求解近似步长μ',建立用近似步长μ'表示步长μ的迭代公式,再根据约束关系确定μ的取值范围。
在通常的情况下,这3项指标是相互关联的,在实际研究过程中,对稳态误差的研究常常被包含在其它两项指标之中。因此,可以说通常的各种LMS改进算法从公式形式看,都是一类变步长改进算法。
LMS算法存在的固定步长因子无法解决收敛速度和稳态误差之间的矛盾。μ值对E{wi(n)}的收敛过程有很大的影响,μ必须满足收敛条件(0<μ<1/λmax)。在收敛范围内,μ越大E{wi(n)}收敛越快;在失调方面,LMS滤波器的阶数越高,步长因子μ和输入信号功率越大,失调系数越大。另外,当Rxx的特征值分散时,LMS算法的收敛性能很差。
3 NLMS算法
失调系数

式中,ξ表示LMS算法的稳态均方误差,ξmin表示维纳误差,根据文献[3~4]LMS算法的失调系数δ=μTr[Rxx]=μMPin。当输入功率变化时,过剩误差ξξmin将变化,若使LMS算法的μ随输入功率Pin成反比变化,则过剩误差将保持不变。若取则可保证LMS算法的过剩误差为给定值。
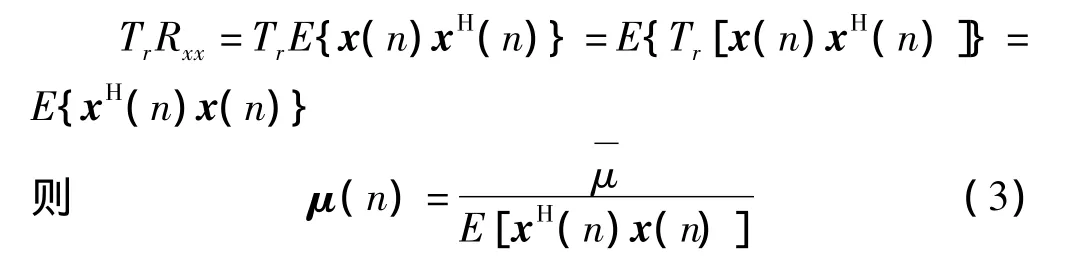

在实际应用时,E[xH(n)x(n)]即输入信号的功率可能很小,从而导致式(3)不稳定,因而通常采用如下的递推公式作为归一化LMS算法

4 仿真实验
阵元数N=4,首先给出了SNR=10 dB,期望信号方位角为30°,干扰信号方位角为0°;
实验1INR=20 dB,快拍数为200,步长因子μ=10-8;10-9;10-10时的波束形成。
由图2可以看出,随着步长因子的增大,波束形成的性能在逐渐提高,根据步长μ对算法性能的影响,变步长LMS滤波算法的步长调整原则应该为在初始收敛阶段或未知系统参数发生变化时,步长应较大,以便有较快的收敛速度和对时变系统的跟踪速度;而在算法收敛后,不管主输入端干扰信号有多大,都应保持很小的调整步长以达到很小的稳态失调噪声。
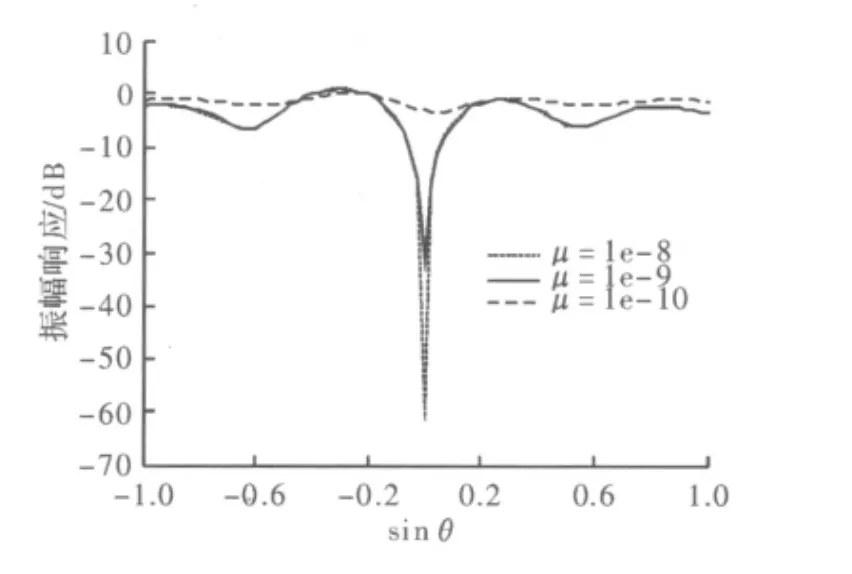
图2 步长对性能的影响
实验2INR=20,μ=10-9,迭代次数为50、200、600时的波束形成性能比较。
由图3可以看出,随着迭代次数的增大,波束形成的性能在逐渐提高,因此迭代次数越大越好,但是次数过大,运算速度会下降。
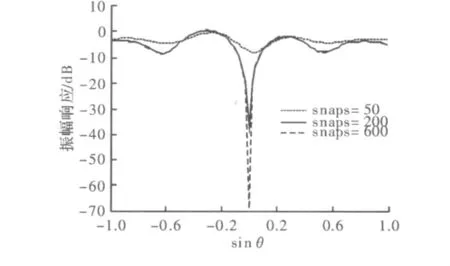
图3 迭代次数的影响
实验3快拍数为200,μ=10-9,迭代次数200,干扰噪声比为10 dB、20 dB、30 dB时的波束形成性能。
从图4看出,随着干噪比的增大,波束形成的性能在逐渐提高,因此干噪比越大性能越好。
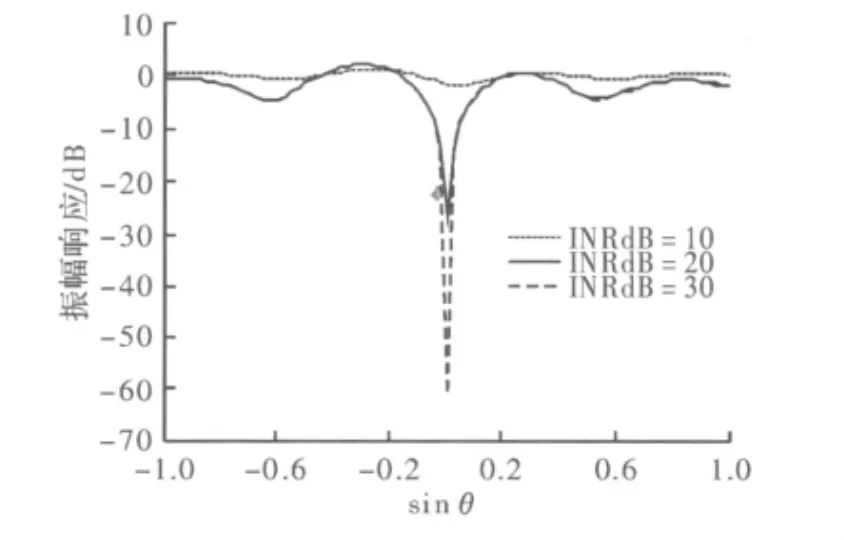
图4 干噪比的影响
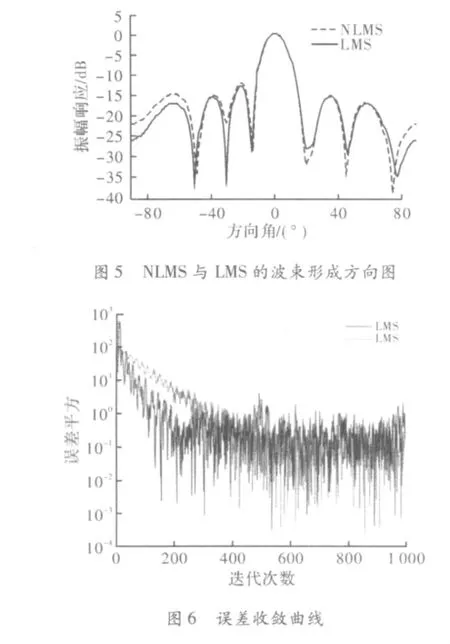
实验4阵元数N=8,快拍L=1 000,信噪比SNR=20,干噪比INR=25,期望信号方位角为0°,干扰信号方位角为20°。
由图5看出,在期望信号方向有明显的峰值,在干扰信号方向有明显的零陷。在同样的条件下,NLMS算法的零陷更深。从图6看出NLMS算法比LMS算法收敛速度更快,误差收敛曲线更平稳。
5 结束语
LMS算法在大快拍数及大干噪比下性能更好,且应根据不同收敛阶段采用不同的步长因子提高波束形成的性能。相同情况下NLMS比LMS波束形成性能更佳,收敛速度更快,误差收敛曲线更平稳。
[1] LI Jian,PETE,WANG Zhisong.Doubly constrained robust capon beamforming[J].IEEE Signal Processing,2004,52(9):2407-2423.
[2] 刘宏清,廖桂生,张杰.稳健的Capon波束形成[J].系统工程学报与电子技术,2005,27(10):1669-1672.
[3] 张贤达.现代信号处理[M].北京:清华大学出版社,2002.
[4] DOUGLAS S C,MENG T H Y.Normalized data nolinearities for LMS adaptation[J].IEEE Transaction on Signal Processing,1994,42(6):1352-1365.